Verilog——JTAG标准的状态机实现
JTAG标准的状态机实现
JTAG作为一项国际标准测试协议(IEEE1149.1兼容),主要用于芯片内部测试和调试。目前的主流芯片均支持JTAG协议,如DSP、FPGA、ARM、部分单片机等。标准的JTAG接口是20Pin,但JTAG实际使用的只有4根信号线,再配合电源、地。目前常见的各种接口形式(20pin、14pin、10pin):

JTAG标准介绍
JTAG的基本原理是在器件内部定义一个TAP(Test Access Port)(测试访问口)通过专用的JTAG测试工具对内部节点进行测试。JTAG测试允许多个器件通过JTAG接口串联在一起,形成一个JTAG链,能实现对各个器件分别测试。JTAG引脚的定义如下列表所示:
-
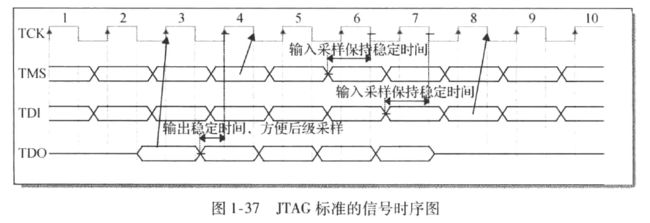
TCK:TCK在IEEE1149.1标准里是强制要求的。TCK为TAP的操作提供了一个独立的、基本的时钟信号,TAP的所有操作都是通过这个时钟信号来驱动的; -
TMS:TMS在IEEE1149.1标准里是强制要求的。TMS信号在TCK的上升沿有效,用来控制TAP状态机的转换。通过TMS信号,可以控制TAP在不同的状态间相互转换; -
TDI:TDI在IEEE1149.1标准里是强制要求的。TDI是数据输入的接口,所有要输入到特定寄存器的数据都是通过TDI接口一位一位串行输入的(由TCK驱动); -
TDO:TDO在IEEE1149.1标准里是强制要求的。TDO是数据输出的接口,所有要从特定的寄存器中输出的数据都是通过TDO接口一位一位串行输出的(由TCK驱动); -
TRST:可选项,TRST可以用来对TAP控制器进行复位(初始化)。因为通过TMS也可以对TAP控制器进行复位(初始化),所以有四线JTAG与五线JTAG之分; -
RTCK:可选项,由目标端反馈给仿真器的时钟信号,用来同步TCK信号的产生,不使用时直接接地; -
nSRST:可选性与目标板上的系统复位信号相连,可以直接对目标系统复位。同时可以检测目标系统的复位情况,为了防止误触发,应在目标端是哪个加上适当的上拉电阻;
JTAG标准的信号时序如下图所示:
通过JTAG连接,可以完成如下的功能:
- 对所有串接在一起的IC进行引脚连接性测试,确认PCB是否焊接正常;
- 对CPU、DSP、FPGA等进行调试;
- 通过JTAG对FPGA进行编程。
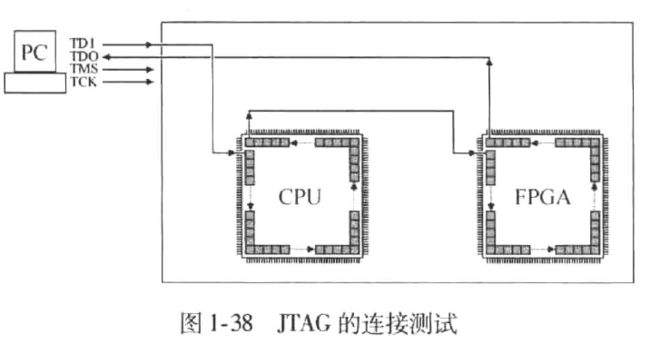
进行引脚连接测试的JTAG用法如下图所示,各个芯片引脚的连通状态可以一次串接通信到PC的TDO引脚中。
按照菊花链方式串接调试的JTAG用法如下图所示,多个串接在一起的CPU和FPGA都能够一起进行调试和测试。
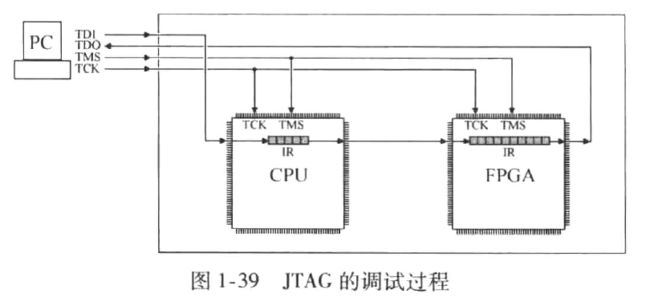
上图可以看出JTAG的调试原理:
- 所有调试芯片的IR寄存器串接在一起,然后进行串行移位,最后,所有数据都进入到JTAG口的TDO中;PC通过对TDO数据的串并转换,获得每个CPU、DPS或FPGA的内部寄存器状态。
- PC将需要写入CPU、DSP或FAPG的数据通过并串转换放置到TDI总线上,最后通过状态移位到规定的CPU寄存器上,最后通过TMS制定生效时刻。
- TCK就是TDI和TDO的移位时钟,而TMS则是控制指令。
因此,JTAG通过一个标准状态机就能够将CPU/DSP/FPGA的内部状态查明,也能改变内部寄存器内容,这也是一种状态控制原理。在1990年之前,JTAG的状态机基本是由各个厂商自行定义的,但后来出现的IEEE1149.1标准对状态转移过程进行了标准化。在某种意义上讲,JTAG的状态机实现过程是最佳的FSM学习对象。
JTAG状态机设计
JTAG内部的状态转换图如下图所示,其中的状态值可以由读者自行定义,但推荐采用独热编码或者格雷码进行编码。其中连续的5个TMS为1时,就会回到Test-Logic-Reset状态。
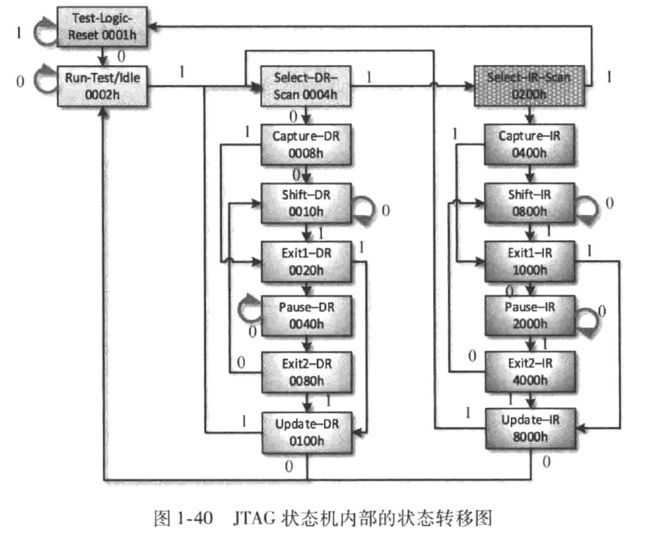
下面的代码是实现JTAG功能的FSM部分,该代码已经应用到多款ASIC芯片中,具有较高的研究价值。
//TAP FSM implementation
module tap_FSM #(parameter sync_mode = 1)(
input tck,
input trst_n,
input tms,
input tdi,
output byp_out,
output updateIR,reset_n,
output reg clockDR, updateDR, clockIR, tdo_en, shiftDR,shiftIR,
output selectIR, sync_capture_en, sync_update_dr, flag,
output [15:0] tap_state
);
//Inter signal declaration
reg [15:0] state;
reg [15:0] next_s;
reg scan_out_a, scan_out_s, updateIR_a;
localparam TEST_LOGIC_RESET = 16'h0001, RUN_TEST_IDLE = 16'h0002, SELECT_DR_SCAN = 16'H0004,
CAPTURE_DR= 16'h0008, SHIFT_DR = 16'h0010, EXIT1_DR = 16'h0020,PAUSE_DR = 16'h0040,
EXIT2_DR = 16'h0080, UPDATE_DR= 16'h0100, SELECT_IR_SCAN = 16'h0200,
CAPTURE_IR= 16'h0400, SHIFT_IR = 16'h0800, EXIT1_IR = 16'h1000,
PAUSE_IR = 16'h2000, EXIT2_IR = 16'h4000, UPDATE_IR= 16'h8000;
assign flag = state[10] || state[11];
wire updateIR_s = state == UPDATE_IR;
assign updateIR = sync_mode ? updateIR_s : updateIR_a;
assign tap_state= state;
always @(posedge tck or negedge trst_n)
if ( !trst_n )
state<=TEST_LOGIC_RESET;
else
state<=next_s;
always @(*)
case(state)
TEST_LOGIC_RESET: if(tms)
next_s=TEST_LOGIC_RESET;
else
next_s=RUN_TEST_IDLE;
RUN_TEST_IDLE: if( tms )
next_s=SELECT_DR_SCAN;
else
next_s=RUN_TEST_IDLE;
SELECT_DR_SCAN: if(tms)
next_s=SELECT_IR_SCAN;
else
next_s=CAPTURE_DR;
CAPTURE_DR: if(tms)
next_s=EXIT1_DR;
else
next_s=SHIFT_DR;
SHIFT_DR: if(tms)
next_s=EXIT1_DR;
else
next_s=SHIFT_DR;
EXIT1_DR: if(tms)
next_s=UPDATE_DR;
else
next_s=PAUSE_DR;
PAUSE_DR: if(tms)
next_s=EXIT2_DR;
else
next_s=PAUSE_DR;
EXIT2_DR: if(tms)
next_s=UPDATE_DR;
else
next_s=SHIFT_DR;
UPDATE_DR: if(tms)
next_s=SELECT_DR_SCAN;
else
next_s=RUN_TEST_IDLE;
SELECT_IR_SCAN:if(tms)
next_s=TEST_LOGIC_RESET;
else
next_s=CAPTURE_IR;
CAPTURE_IR: if(tms)
next_s=EXIT1_IR;
else
next_s=SHIFT_IR;
SHIFT_IR: if(tms)
next_s=EXIT1_IR;
else
next_s=SHIFT_IR;
EXIT1_IR: if(tms)
next_s=UPDATE_IR;
else
next_s=PAUSE_IR;
PAUSE_IR: if(tms)
next_s=EXIT2_IR;
else
next_s=PAUSE_IR;
EXIT2_IR: if(tms)
next_s=UPDATE_IR;
else
next_s=SHIFT_IR;
UPDATE_IR: if(tms)
next_s=SELECT_DR_SCAN;
else
next_s=RUN_TEST_IDLE;
endcase
//FSM outputs
reg rst_n;
//reg clockDR, updateDR, clockIR, tdo_en, rst_n, shiftDR, shiftIR;
//ClockDR/ClockIR - posedge occurs at the posedge of tck
//updateDR/updateIR - posedge occurs at the negedge of tck
always @( tck or state )begin
if ( !tck && ( state == CAPTURE_DR || state == SHIFT_DR ))
clockDR = 0;
else
clockDR = 1;
if ( !tck && ( state == UPDATE_DR ))
updateDR = 1;
else
updateDR = 0;
if ( !tck && ( state == CAPTURE_IR || state == SHIFT_IR ))
clockIR = 0;
else
clockIR = 1;
if ( !tck && ( state == UPDATE_IR ))
updateIR_a = 1;
else
updateIR_a = 0;
end
always @( negedge tck )
if ( state == SHIFT_IR || state == SHIFT_DR )
tdo_en <= 1;
else
tdo_en <= 0;
always @( negedge tck )
if ( state == TEST_LOGIC_RESET )
rst_n <= 0;
else
rst_n <= 1;
always @(negedge tck or negedge trst_n)
if ( !trst_n )
shiftDR <= 0;
else if ( state == SHIFT_DR )
shiftDR <= 1;
else
shiftDR <= 0;
always @(negedge tck or negedge trst_n)
if ( !trst_n )
shiftIR <= 0;
else if ( state == SHIFT_IR )
shiftIR <= 1;
else
shiftIR <= 0;
assign reset_n = rst_n & trst_n;
assign selectIR = state == SHIFT_IR;
assign sync_capture_en = ~(shiftDR | (state == CAPTURE_DR) | (state == SHIFT_DR));
assign sync_update_dr = state == UPDATE_DR;
always @( posedge clockDR )
scan_out_a <= shiftDR & tdi & ~(state == CAPTURE_DR);
wire nxt_st_3 = (state == SELECT_DR_SCAN) & ~tms;
wire nxt_st_4 = ((state == CAPTURE_DR) & ~tms) || ( state == SHIFT_DR & ~tms);
reg sel;
always @(posedge tck or negedge trst_n)
if(!trst_n )
sel <= 0;
else
sel <= ~(nxt_st_3 | nxt_st_4);
wire scan_out = sel ? scan_out_s : shiftDR & tdi;
always @(posedge tck )
scan_out_s <= scan_out & ~(state == CAPTURE_DR);
assign byp_out = sync_mode ? scan_out_s : scan_out_a;
endmodule
对于上述代码,还有一种非常简洁的描述,同样是三段式描述风格,但最重要的组合电路部分可通过手工推导,直接将always描述的组合电路化简为最小逻辑实现代码。
module vjtag (
input clk, // Internal clock
input tdo_mux,// TDO before the negative edge flop
input bypass, // JTAG instruction=BYPASS
input tck, // clock input
input trst_n, // optional async reset active low
input tms, // Test Mode Select
input tdi, // Test Data In
output reg tdo, // Test Data Out
output reg tdo_enb,//Test Data Out tristate enable
output tdi_r1, // TDI flopped on TCK.
output tck_rise, // tck rate clock enable
output captureDR,// JTAG state=CAPTURE_DR
output shiftDR, // JTAG state=SHIFT_DR
output updateDR, // JTAG state=UPDATE_DR
output captureIR,// JTAG state=CAPTURE_IR
output shiftIR, // JTAG state=SHIFT_IR
output updateIR
);
reg tck_r1,tck_r2,tck_r3;
reg tdi_f_local; // local version
wire tdo_enb_nxt; // D input to TDO_ENB flop
wire tdo_nxt; // D input to TDO flop
wire itck_rise;
wire tck_fall;
reg [3:0] state; // current state
wire a,b,c,d,a_nxt,b_nxt,c_nxt,d_nxt;
assign a = state[0];
assign b = state[1];
assign c = state[2];
assign d = state[3];
assign a_nxt=(~tms & ~c & a) |(tms & ~b)|(tms & ~a)|(tms & d & c);
assign b_nxt=(~tms & b & ~a) |(~tms & ~c)|(~tms & ~d & b)|(~tms & ~d & ~a)|(tms & c & ~b)|(tms & d & c & a);
assign c_nxt=(c & ~b)|(c & a)|(tms & ~b);
assign d_nxt=(d & ~c)|(d & b)|(~tms & c & ~b)|(~d & c & ~b & ~a);
assign tdo_enb_nxt = state == 4'b0010 | state == 4'b1010 ? 1'b1 : 1'b0;
assign captureIR = state == 4'b1110 ? 1'b1 : 1'b0;
assign shiftIR = state == 4'b1010 ? 1'b1 : 1'b0;
assign updateIR = state == 4'b1101 ? 1'b1 : 1'b0;
assign captureDR = state == 4'b0110 ? 1'b1 : 1'b0;
assign shiftDR = state == 4'b0010 ? 1'b1 : 1'b0;
assign updateDR = state == 4'b0101 ? 1'b1 : 1'b0;
assign tdo_nxt = bypass == 1'b1 & state == 4'b0010 ? tdi_f_local : tdo_mux;
assign tdi_r1 = tdi_f_local;
always @(posedge clk) begin : rtck_proc
tck_r3 <= tck_r2;
tck_r2 <= tck_r1; //synchronizers for edge detection
tck_r1 <= tck;
end
assign tck_rise = itck_rise;
assign itck_rise = tck_r2 & ~tck_r3;
assign tck_fall = ~tck_r2 & tck_r3;
always @(posedge clk)
if (trst_n == 1'b0)
state <= 4'b1111;
else if (itck_rise == 1'b1)begin
state <= {d_nxt, c_nxt, b_nxt, a_nxt};
end
always @(posedge clk)
if (trst_n == 1'b0)
tdi_f_local <= 1'b0;
else if (itck_rise == 1'b1 ) begin
tdi_f_local <= tdi;
end
always @(posedge clk)
if (trst_n == 1'b0)begin
tdo <= 1'b0;
tdo_enb <= 1'b0;
end
else if (tck_fall == 1'b1 ) begin
tdo <= tdo_nxt;
tdo_enb <= tdo_enb_nxt;
end
endmodule // module vjtag
JTAG接口除了标准的4信号引脚外,TI还定义了一种叫做SBW-JTAG的接口,仅用两根引脚(SBWTCK、SBWTDIO)即可实现JTAG功能,通常用于引脚受限的芯片上。ARM的Cortex-M系列CPU均包含SW-JTAG定义标准。
有限状态机小结
学习有限状态机的关键是理解有限状态机的运行原理,知道通通过有限状态机能够将一个复杂的逻辑流程简化为有限的几个状态,所有的输出相应都是与状态对应的输出。有限状态机的编写风格当采用三段式编码,并尽量采用Moore型状态机。
参考
本文主要内容来自《通信IC设计》,仅用于学习参考。
2021-04-07.