半物理仿真系统——EPB HIL系统解决方案
半物理仿真是利用仿真模型替代一部分物理实物,并与其它实物构成实时回路的一种系统实时仿真方法,这种系统实时仿真方法可以缩短研制周期、降低试验成本、减少试验危险,早期主要应用在武器的研发和验证方面。随着计算机控制技术发展及仿真系统的广泛集成,半物理仿真的应用越来越受到企业单位的重视,在航天、航空、能源、汽车、机器人、核动力等多个领域获得广泛认可。本文以EPB HIL(电子驻车制动硬件在环)系统为例说明同元软控半物理仿真系统解决方案。

半物理仿真系统
现实生活中产品的控制系统包含控制器和被控对象两个部分,如驻车制动控制器与卡钳总成、电机控制器与电机、自动驾驶域控制器与汽车等。在研发控制器时,可能出现两种需要用到半物理仿真系统的情况:
1. 新型控制器产品的软件研发一般都是基于模型设计,软件原型的研发速度一般快于硬件,这时需要一个高性能实时机来模拟控制器硬件,运行控制器模型生成的代码,使软件能够作用于实际被控对象,这样来做早期快速控制原型验证,以进行早期软件迭代来提高研发工作效率。该方案是半物理仿真系统的一种应用,称为快速控制原型(Rapid Control Prototype, RCP)。
2. 控制器研发到尾声阶段,为了验证控制系统功能与性能,如果直接拿实际被控对象做试验,很可能因为控制器软件尚不完善(如存在bug)导致被控对象的失控,从而造成财产损失甚至是人员的伤亡。通过对被控对象进行物理建模,并将其生成实时代码运行在高性能实时机上,作为虚拟被控对象与实际控制器形成闭环进行验证。该方案是半物理仿真系统的另一种应用,称为硬件在环(Hardware In the Loop, HIL)。
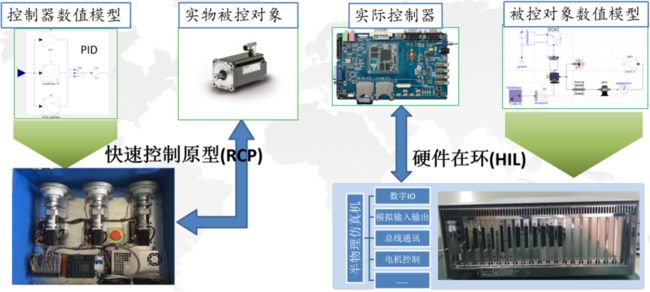
图1 半物理仿真系统
HIL系统
硬件在环系统(简称“HIL系统”)是一种由“被测控制器+实时机+被控对象实时模型+上位机软件”以及其它配件组成的半物理仿真系统,以实时机运行被控对象实时模型来模拟被控对象的运行状态,将被测控制器与实时机连接,对被测控制器进行基于需求的、系统性的测试。HIL系统架构如下图:
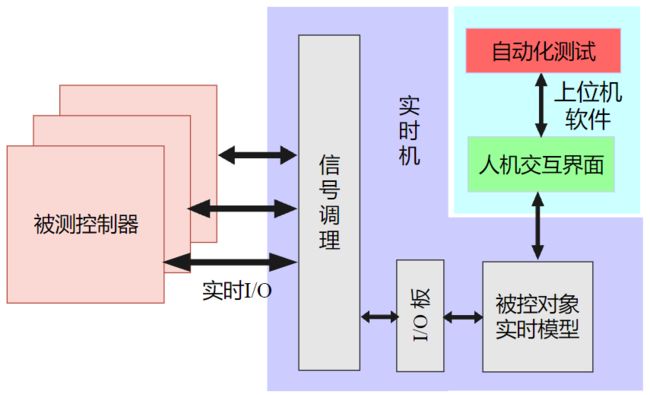
图2 HIL系统架构
1.被测控制器与实时机之间通过实时I/O连接,实时I/O负责实时机与被测控制器间的数字、模拟和CAN总线等等类型信号的双向传递;
2.实时机中包含信号调理模块、I/O板等辅助设备,通过信号调理模块调节模拟现实工况中需要的信号;
3.被控对象实时模型是被控对象的实时模型,通常需要生成C代码编译为可执行文件部署到实时机中运行;
4.人机交互界面与自动化测试都属于上位机软件,它可以通过API访问实时机中运行的被控对象实时模型的变量存储区域,将它们通过组态界面可视化。此外,自动化测试软件可以根据设计好的测试策略进行批量化测试,将不同的测试用例数据,顺序导入到被控对象实时模型的变量区域,并驱动模型仿真,获取测试结果进行分析、生成报告。
目前市面上HIL系统解决方案供应商多以欧美为主,在此形势下,同元软控研发的多领域统一建模平台MWorks.Sysplorer及相关工具链向广大客户提供了一套国产化方案。接下来,我们就具体的应用场景来介绍该方案。
EPB HIL系统应用场景
EPB是Electronic Parking Brake电子驻车制动的缩写,本案例基于“控制器+实时机”搭建EPB HIL系统,展示同元软控的半物理仿真系统方案的应用场景。
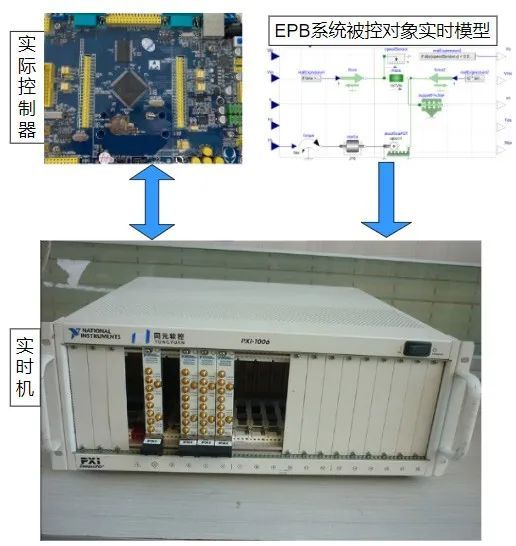
图3 EPB HIL系统框图
EPB系统
电子驻车制动系统以卡钳式EPB最具代表性,被广泛用于乘用车中。它利用线控技术将行车过程中的临时性制动(Auto Hold)功能和停车后的长时性制动(Parking Brake)功能整合在一起,并由电子控制方式实现停车制动。EPB系统去除了普通机械式驻车制动系统的手柄或踏板等机械装置,通过一个EPB控制器开关(即电子驻车按钮,通常设计为按钮P)对驻车制动器进行控制,该系统实现了驻车制动的电子化控制。
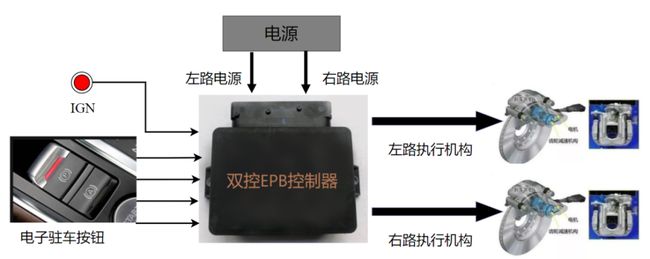
图4 电子驻车制动系统
电子驻车制动系统功能主要通过电力传动来实现,通过自带控制器发出指令来驱动卡钳进行相关动作。其主要信号交互由电子驻车按钮、双控EPB控制器、加速度传感器(控制器内部)、轮速传感器(汽车车轮内附)和执行机构(电机、刹车卡钳等)组成,轮速传感器负责采集车轮速度进而经过控制器计算后得到车速,加速度传感器传出的加速度信号经过控制器计算得到车辆所在路面的坡度。在制动过程中,电子驻车制动控制单元在接收到电子驻车按钮传来的驻车信号后,将车速和坡度输入到相应的控制策略计算并输出相应信号到执行机构以完成刹车动作。
控制器
简化控制器的输入为车辆车速、由加速度传感器信号计算得到的路面坡度、EPB控制器开关状态、刹车踏板与油门踏板状态等,将汽车质量和路面摩擦系数设计为标定量,输出为制动扭矩。在汽车行业常用的控制器包括Infineon系列、NXP系列和STM32系列等,本案例选用STM32F407来开发控制策略作为EPB HIL系统中的ECU控制器。

图5 STM32F407控制板
被控对象实时模型
同元软控自主研发的多领域统一建模软件MWorks.Sysplorer,擅长做被控对象建模与仿真工作,它具备以下优点:
1.所建立的模型具有“所见即所得”特点,可读性好,模型拓扑接近现实物理结构;
2.图形化与文本同步建模能力,不仅支持模块组件拖拽与连接,还支持Modelica文本语言建模,建模中编辑图形化界面与文本内容时,两者时刻保持同步;(图9)
3.对物理模型进行机理建模时,MWorks.Sysplorer可以直接对非因果隐式微分代数方程(DAE)进行高精度求解,求解常微分方程(ODE)更不在话下;目前同元软控所研发的求解器已应用于国际知名工业软件公司里卡多的仿真软件IGNITE中;(图6)
4.MWorks.Sysplorer支持物理模型“高效实时代码生成”,生成代码可运行在多种实时机和多种操作系统中;
5.所建立物理模型在模型在环(MIL)以及硬件在环(HIL)环境下具有一致性功能表现。(图7)
图6 里卡多IGNITE软件采用MWorks求解器

图7 同一工况下MIL结果与HIL结果一致(MIL线条被HIL线条覆盖)
基于MWorks.Sysplorer构建EPB HIL系统的被控对象实时模型,模型中包含汽车质量块、驱动力模块、摩擦力模块、速度传感器、电机、齿轮、转动机械结构及平动机械结构。模型参数包括汽车质量、斜坡角度、路面摩擦系数、驱动力及驱动力驱动时间。模型的输入为制动扭矩,由电机推动转动机械结构,再通过转动转平动推动齿轮动作,实现车辆的制动。模型的输出包括速度传感器采集到的车速、汽车质量、斜坡角度(平路上为0°)和路面摩擦系数,这些值将会被输出到控制器中。
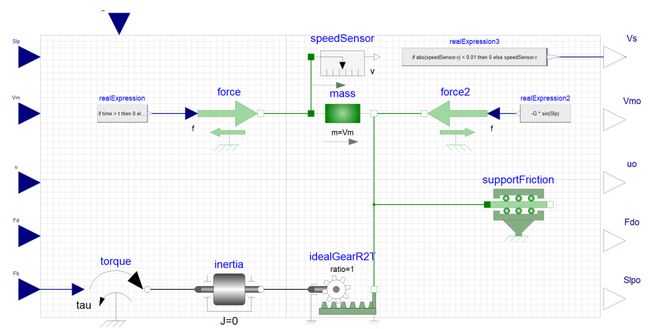
图8 EPB HIL系统被控对象实时模型

图9 EPB HIL系统被控对象实时模型Modelica文本
案例演示
本案例如图10所示,演示车辆上坡通过EPB系统制动的过程。被控对象实时模型运行在实时机里,控制器与被控对象实时模型通过CAN通信进行实时数据交互。
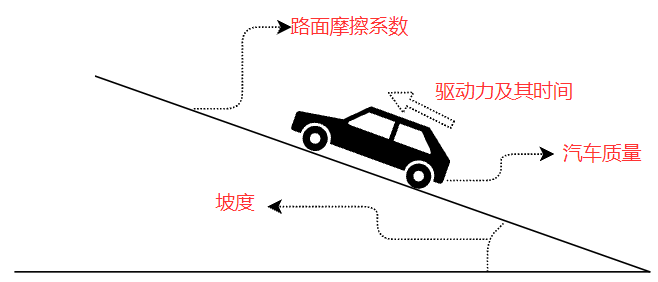
图10 汽车运动场景示意
实时机中被控对象实时模型可通过任意设定参数来模拟汽车质量、坡度、路面摩擦系数和驱动力及其时间随机组合的场景,并通过CAN通信将当前场景下的实时数据发送给控制器,利用STM32F407开发板的按键模拟电子驻车按钮,当按钮被按下时,控制器通过CAN通信发出制动扭矩给到实时机中的EPB系统被控对象实时模型,被控对象实时模型会根据制动扭矩结合路面坡度和摩擦力计算整车的减速度,产生相应的制动动作。
图11 驻车制动系统半物理仿真平台
如图11所示在其中一种场景下进行了仿真演示,该场景下的参数配置如下:汽车质量为1200kg、坡度为-30°(坡度负为上坡)、路面摩擦系数为0.8、驱动力为10000N、驱动力持续时间为5s。
从可行性、安全性、和研发总成本等方面考虑,以HIL系统为代表的半物理仿真系统可减少被控对象在实际场景下的测试次数,缩短开发时间和降低成本的同时提高控制器的软件质量,降低产品应用的风险,该系统方案可推广应用于航空、航天、汽车、工业控制、电力电子、核动力及家电等行业控制器开发与验证过程中。
在此基础上,可以进一步实现为其他控制器提供HIL系统解决方案,包括以下方面:
1. 汽车电动转向系统控制器的硬件在环方案:量化在不同车速下电动助力对驾驶员手感的影响,验证系统有效时控制策略的正确性、实现极端工况的模拟,确保系统失效时会采取安全措施。
2. 无人机飞控硬件在环方案:在无人机飞行试验前使无人机操作员提前熟悉操作技巧、验证飞行算法的稳定性、降低试验飞行时坠毁情况发生的概率,是无人机飞行试验前强有力的可视化测试手段。
3. PHIL方案:PHIL是针对功率级电力电子系统的HIL系统解决方案,它将大功率的实验转为信号级的实验,既能保证实验时人员的安全性,又能够减少实验时带来的器件损毁,因此基于半物理仿真的低电压穿越测试可以作为配合实物测试的有效试验手段。