小熊派gd32f303学习之旅(5)—使用DMA和空闲中断实现串口接收
小熊派gd32f303学习之旅(5)—使用DMA和空闲中断实现串口接收
一、前言
对于串口的数据接收来说,和发送一样,如果采用传统的接收中断模式接收数据,同样的会因为频繁中断而导致消耗大量CPU资源,所以也使用DMA进行串口数据的接收。
然后对于串口接收到的数据,还有很重要的一点就是不确定长度,这样就不知道何时该停止接收,这个时候,串口的空闲中断就体现出他的重要性了,那么什么是空闲中断呢?
空闲中断是在检测到有数据接收后,总线上在一个字节的时间内没有再接收到数据时,从而产生中断。即串口的RXNE位被置位之后才开始检测,检测到空闲之后,串口的CR1寄存器的IDLE位被硬件置1。
这样,当产生空闲中断后,就可以停止使用DMA进行串口数据的接收了。
通过串口gd32f30x的用户手册,可以看到,uart0的接收使用的的DMA0的通道4:

二、开启UART0接收
首先,使能UART0接收

然后配置接收DMA和空闲中断
#ifdef UART0_RX
#ifndef UART0_DMA
/* 定义一个DMA配置结构体 */
dma_parameter_struct dma_init_struct;
/* 使能 DMA 时钟 */
rcu_periph_clock_enable(RCU_DMA0);
#endif
/* 初始化 DMA0 通道4 */
dma_deinit(DMA0, DMA_CH4);
dma_init_struct.direction = DMA_PERIPHERAL_TO_MEMORY; /* 外设到存储器方向 */
dma_init_struct.memory_addr = (uint32_t)UART0_RX_BUF; /* 存储器基地址 */
dma_init_struct.memory_inc = DMA_MEMORY_INCREASE_ENABLE; /* 存储器地址自增 */
dma_init_struct.memory_width = DMA_MEMORY_WIDTH_8BIT; /* 存储器位宽为8位 */
dma_init_struct.number = UART0_TX_LEN; /* 传输数据个数 */
dma_init_struct.periph_addr = ((uint32_t)0x40013804); /* 外设基地址,即USART数据寄存器地址 */
dma_init_struct.periph_inc = DMA_PERIPH_INCREASE_DISABLE; /* 外设地址固定不变 */
dma_init_struct.periph_width = DMA_PERIPHERAL_WIDTH_8BIT; /* 外设数据位宽为8位 */
dma_init_struct.priority = DMA_PRIORITY_ULTRA_HIGH; /* 软件优先级为极高*/
dma_init(DMA0, DMA_CH4, &dma_init_struct);
/* DMA循环模式配置,不使用循环模式 */
dma_circulation_disable(DMA0, DMA_CH4);
/* DMA存储器到存储器模式模式配置,不使用存储器到存储器模式*/
dma_memory_to_memory_disable(DMA0, DMA_CH4);
/* USART DMA 发送和接收使能 */
usart_dma_transmit_config(USART0, USART_DENT_ENABLE|USART_DENR_ENABLE);
/* DMA0 通道4 中断优先级设置并使能 */
nvic_irq_enable(DMA0_Channel4_IRQn, 0, 0);
/* 使能 DMA0 通道4 半传输、传输完成、传输错误中断 */
dma_interrupt_enable(DMA0, DMA_CH4, DMA_INT_FTF|DMA_INT_HTF|DMA_INT_ERR);
/* 使能 DMA0 通道4 */
dma_channel_enable(DMA0, DMA_CH4);
/* USART中断设置,抢占优先级0,子优先级0 */
nvic_irq_enable(USART0_IRQn, 0, 0);
/* 使能USART0空闲中断 */
usart_interrupt_enable(USART0, USART_INT_IDLE);
#endif
注意:关于usart_dma_transmit_config()函数,如果要同时开启接收和发送,那么需要写在一起,不能分开调用这个函数进行使能。
三、编写中断服务函数,完成中断数据的获取
首先,我们需要定义几个变量
#ifdef UART0_RX
/* 接收缓存 */
#define UART0_RX_LEN 256 /* 单个缓存区字节数 */
uint8_t UART0_RX_BUF[UART0_RX_LEN*2]; /* 双接收缓冲区 */
uint8_t UART0_RX_STAT = 0; /* 接受状态 0x01:已接收到数据 0x03:接收缓冲区半满 0x07:接收缓冲区全满 */
uint32_t UART0_RX_NUM = 0; /* 接收到的数据个数 */
#endif
然后完成中断服务函数
/* USART0 中断服务函数
* 参数:无
* 返回值:无 */
/* 串口0中断服务程序 */
void USART0_IRQHandler(void)
{
if(RESET != usart_interrupt_flag_get(USART0, USART_INT_FLAG_IDLE)) //空闲中断
{
usart_interrupt_flag_clear(USART0,USART_INT_FLAG_IDLE); /* 清除空闲中断标志位 */
usart_data_receive(USART0); /* 清除接收完成标志位 */
dma_channel_disable(DMA0, DMA_CH4); /* 关闭DMA传输 */
UART0_RX_NUM = sizeof(UART0_RX_BUF) - dma_transfer_number_get(DMA0,DMA_CH4);
UART0_RX_BUF[UART0_RX_NUM] = '\0'; /* 添加字符串结束符 */
UART0_RX_STAT = 0x01; /* 接受状态 0x01:已接收到数据 */
/* 重新设置DMA传输 */
dma_memory_address_config(DMA0,DMA_CH4,(uint32_t)UART0_RX_BUF);
dma_transfer_number_config(DMA0,DMA_CH4,sizeof(UART0_RX_BUF));
dma_channel_enable(DMA0, DMA_CH4); /* 开启DMA传输 */
}
}
/* DMA0 通道4 中断服务函数
* 参数:无
* 返回值:无 */
void DMA0_Channel4_IRQHandler(void)
{
/* 清除DMA0 通道3 中断标志位 */
dma_interrupt_flag_clear(DMA0, DMA_CH3, DMA_INT_FLAG_G);
if(dma_interrupt_flag_get(DMA0, DMA_CH3, DMA_INT_FLAG_HTF))
{
UART0_RX_NUM = UART0_RX_LEN;
UART0_RX_BUF[UART0_RX_LEN] = '\0'; /* 添加字符串结束符 */
UART0_RX_STAT = 0x03; /* 接受状态 0x03:接收缓冲区半满 */
}
if(dma_interrupt_flag_get(DMA0, DMA_CH3, DMA_INT_FLAG_FTF))
{
UART0_RX_NUM = UART0_RX_LEN*2;
UART0_RX_BUF[UART0_RX_LEN*2-1] = '\0'; /* 添加字符串结束符 */
UART0_RX_STAT = 0x07; /* 接受状态 0x07:接收缓冲区全满 */
}
}
四、修改main函数,接收串口数据
将main函数修改为如下所示,循环判断串口待处理数据缓冲区中是否有需要处理的数据,如果有的话,将数据通过串口发送,并且显示其长度,发送完后将数据计数清零。
int main(void)
{
int t = 0;
/* 配置系统时钟 */
systick_config();
/* 初始化LED */
led_init();
/* 初始化USART0 */
uart0_init(115200);
/* 通过串口打印 Hello world! */
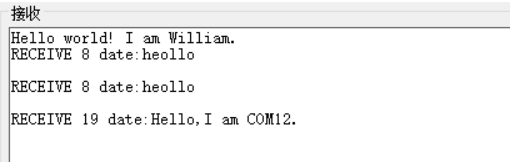
u1_printf("Hello world! ");
u1_printf("I am William. \r\n");
while(1)
{
if(UART0_RX_STAT > 0)
{
UART0_RX_STAT = 0;
u1_printf("RECEIVE %d data:%s \r\n", UART0_RX_NUM, UART0_RX_BUF);
}
delay_1ms(10);
t++;
if(t % 200 == 0) LED(0); /* turn off LED */
else if(t % 200 == 100) LED(1); /* turn on LED */
}
}
五、功能验证
编译链接烧录到小熊派开发板,通过串口调试助手向MCU发送数据:
六、附录
完整代码我存放在码云,可以查看:https://gitee.com/william_william/BearPi-GD32F303RGT6.git
上一篇:小熊派gd32f303学习之旅(4)—使用DMA实现串口打印
下一篇:小熊派gd32f303学习之旅(6)—使用基本定时器实现LED闪烁