【ROS机器人系统】自主导航+YOLO目标检测+语音播报
文章目录
- 一、总体功能设计
- 二、实验环境
- 三、演示
- 四、场景搭建、建图与导航模块
-
- 4.1 场景搭建
- 4.2 小车模型
- 4.3 导航模块
-
- (1)安装依赖
- (2)从github下载的文件中的test_ws目录下
- (3)运行导航功能
- 五、YOLO目标检测模块
-
- 5.1 YOLO介绍
- 5.2 本课设尝试使用过的YOLO模型
- 六、语音合成模块
- 七、小车摄像头与YOLO模块的通信
-
- 7.1 小车摄像头模块发布话题消息
- 7.2 YOLO模块模块订阅话题消息
- 八、YOLO模块与语音合成模块的通信
-
- 8.1 YOLO模块模块发布话题消息
- 8.2 语音合成模块订阅话题消息
- 九、演示时各模块的启动命令
- 注意事项;
- 源码:
一、总体功能设计
完成自主导航功能,并在小车移动至指定地点的过程中,通过机器人的摄像头检测导航途中所见物体,识别出物体的种类(框选出不同物体并标注识别结果),结合科大讯飞语音合成模块对识别结果进行语音播报。
(注:目标检测,也叫目标提取,是一种基于目标几何和统计特征的图像分割。它将目标的分割和识别合二为一,其准确性和实时性是整个系统的一项重要能力。)
二、实验环境
Windows10
VMware虚拟机 ubuntu18.04
Ros melodic
三、演示
演示地址:https://www.bilibili.com/video/BV1tB4y1Y7UH
四、场景搭建、建图与导航模块
4.1 场景搭建
- gazebo Building Editor

- gazebo Building Editor

由于官方的模型库中没有我所使用的YOLO模型中能够检测到的特征鲜明的物体,如猫、狗、大象、马、苹果、香蕉等,所以部分物体(如图中的香蕉)放在相框中的图片中进行识别。 - 设置的小车主要识别的区域

4.2 小车模型
本次课设使用的是TurtleBot3中的Waffle小车,下图中的中间一个(含有雷达与摄像头)

小车模型在rviz中展示

4.3 导航模块
- 注:对应github文件中的
test_ws工作空间
gmapping 通过粒子滤波将激光距离数据转化为珊格地图。
- 优点:在长廊及低特征场景中建图效果好;构建小场景地图所需的计算量较小且精度较高。缺点:依赖里程计,无法适用无人机及地面小车不平坦区域;无回环;大的场景,粒子较多的情况下,特别消耗资源。
主要参考:我在github上传的这个文件:导航模块参考.pdf
(1)安装依赖
在开始该部分设计之前,我们先安装相关支持的功能包,包括建图、导航以及机器人仿真的功能包(克隆下载后仅保留turtlebot3_gazebo文件夹),相关命令如下:
sudo apt-get update
sudo apt-get install ros-melodic-turtlebot3-*
sudo apt-get install ros-melodic-navigation
sudo apt-get install ros-melodic-slam-gmapping
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
sudo apt-get install ros-melodic-dwa-local-planner
- 在使用仿真机器人之前先利用以下命令确定机器人类型,在 test_ws 目录下运行:
echo “export TURTLEBOT3_MODEL=waffle” >>~/.bashrc
(2)从github下载的文件中的test_ws目录下
先 catkin_make编译然后刷新工作空间,最后在运行 launch文件即可完成整体功能的启动,建图流程:
在test_ws目录下运行以下两条命令
roslaunch turtlebot3_gazebo turtlebot3_world.launch
roslaunch my_navi build_map.launch
运行完上述前两条命令之后会出现一个仿真的场景,然后rviz中会显示当前建图结果,然后运行下面的命令会出现键盘控制界面,
rosrun turtlebot3_teleop turtlebot3_teleop_key
可以利用“w”,“a”,“s”,“d”来控制机器人移动,这四个按键分别控制向前移动、向左自旋、停止和向右自旋,合理的控制机器人移动来建立环境地图,结果如图3所示,最后利用下面的命令保存建图结果,
rosrun map_server map_saver -f map2
产生图片名为“map2.pgm”和名为“map2.yaml”的地图参数,相关建图结果如图所示
- 开始建图的时候

- 建图完成

- 控制小车建图的时候各个节点之间的通信情况

(3)运行导航功能
导航相关命令如下,在 test_ws 目录下执行命令之后会出现仿真场景和 rviz,点击 rviz 导 航栏的“2D Nav Goal”,然后点击地图上的任意空白地点之后机器人会自动导航至目标点, 并且 rviz 和仿真地图中机器人的动作在没有系统延时的时候会保持一致。
roslaunch turtlebot3_gazebo turtlebot3_world.launch
roslaunch my_navi turtlebot_navigation.launch
五、YOLO目标检测模块
注:对应github文件中的yolo_ws工作空间
主要参考:小车yolo机械臂(一)ros下gazebo搭建小车(可键盘控制)安装摄像头仿真 加载yolo检测识别标记物体
5.1 YOLO介绍
YOLO(You Only Look Once) 是一种基于深度神经网络的对象识别和定位算法,其最大的特点是运行速度很快,可以用于实时系统。
5.2 本课设尝试使用过的YOLO模型
注:本课设使用的是yolov2_tiny.weights(能识别80种类别的物体)

六、语音合成模块
- 注:对应github文件中的
catkin_ws工作空间 - 主要参考:
- ROS实战( 三 )利用科大讯飞tts实现ROS下语音合成播报
- ROS实战(二) 科大讯飞语音合成模块
可直接用文章(三);注意第二个参考中的以下两个需要执行一些下:
sudo apt-get install sox
为了不要每次运行都souce,把x64目录下的共享库文件拷贝到/usr/lib/下,先cd到voice/libs/x64目录下
cp libmsc.so /usr/lib/
七、小车摄像头与YOLO模块的通信
7.1 小车摄像头模块发布话题消息
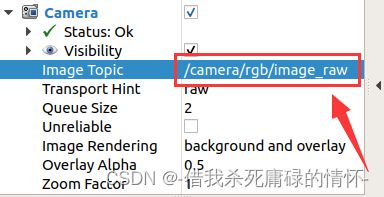
找到导航模块中小车的摄像头对应的话题名称:
打开小车导航模块的时候在rviz中添加camera(可以用来查看小车摄像头的实时画面),然后选择话题名称:/camera/rgb/image_raw
(也可以在rqt_image_view中查看话题名称)
- rviz中添加camera
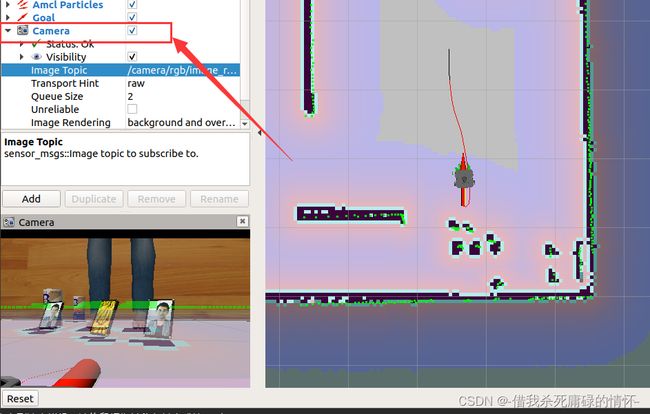
- 选择topic
- rqt_image_view中查看摄像头话题名称

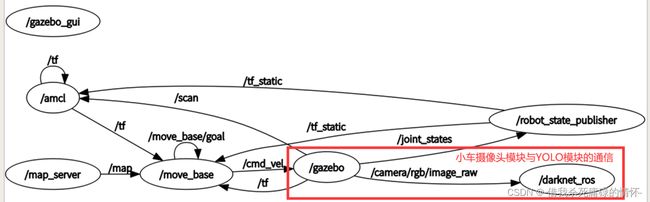
7.2 YOLO模块模块订阅话题消息
在YOLO模块中订阅该话题:

- 通信过程
八、YOLO模块与语音合成模块的通信
8.1 YOLO模块模块发布话题消息
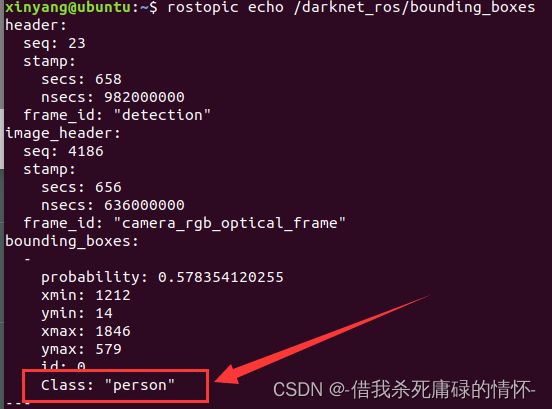
YOLO检测模块中的ros.yaml文件中,发布话题/darknet_ros/bounding_boxes

rostopic echo /darknet_ros/bounding boxes,展示发布到topic上的消息数据,Class是需要获取到的识别结果
8.2 语音合成模块订阅话题消息
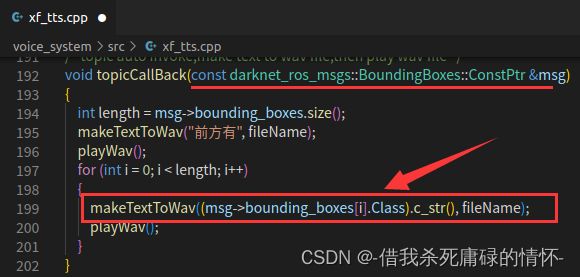
- 语音合成模块节点

- 在回调函数中获取话题/darknet_ros/bounding boxes消息中的Class内容:
- 通信过程

九、演示时各模块的启动命令
(在test_ws路径下)启动gazebo:roslaunch my_navi xinyang.launch
(在test_ws路径下)启动导航模块:roslaunch my_navi turtlebot_navigation.launch
(在yolo_ws路径下)启动YOLO模块:roslaunch darknet_ros darknet_ros.launch
(在catkin_ws路径下)启动语音合成模块:rosrun voice_system xf_tts_node
- 全局:各节点会之间的通信情况

注意事项;
实验的过程中遇到了许多的bug和问题,例如:
- YOLO模块检测物体的时候检测框的左上角不出现文字(后来发现是缺少labels文件);
- gazebo打开的时候可能会崩溃(后来发现是虚拟机的问题,需要关闭vmware的3D图形加速选项);
- 关闭gazebo的时候尽量使用ctrl+C去关闭,直接关闭窗口可能不能完全关闭gazebo的全部进程(此时需要重启);
- 使用语音模块去订阅YOLO模块发送的消息的时候要处理好/darknet_ros/bounding boxes话题信息,在回调函数中提取其中的识别结果。
源码:
github源码地址:https://github.com/xinyangwy/ROS_DesignCode