ROS机器人 Autolabor Pro1与激光雷达 TF坐标变换
我们购买了Autolabor Pro1机器人后,都会在其上加些传感器实现一些应用,无论使用什么传感器,都需要面对不同坐标系的转换关系问题,即我们常说的TF坐标变换。
Autolabor Pro1是什么?
Autolabor Pro1是一款室内外通用机器人移动底盘。

该平台上可集成激光雷达、摄像头、GPS等传感器,云台、机械臂、抓持器等附件设备,基于平台可实现SLAM自主路径规划导航、障碍物避障等功能,适用于巡检、抓取、智能驾驶、协同控制、计算机视觉、深度学习等技术的研究与应用。提供底层驱动和基于ROS平台的API接口,精准的PID控制与运动模型,方便硬件集成和二次开发。
详细了解 | Autolabor Pro1
TF是什么?
tf介绍
tf is a package that lets the user keep track of multiple coordinate frames over time. tf maintains the relationship between coordinate frames in a tree structure buffered in time, and lets the user transform points, vectors, etc between any two coordinate frames at any desired point in time.
简单来说是将坐标系与坐标系连接起来,使用tf树定义不同坐标系之间的平移与旋转变换关系,并且持续追踪多个坐标系内的变化情况。
为什么需要坐标变换?
在ROS中定义了许多坐标系,有机器人坐标系(base_link),有雷达坐标系(base_laser),地图坐标系(map),里程计坐标系(odom)等。
以机器人中心为原点的坐标系,称为base_link坐标系,以激光雷达中心为原点的坐标系,称为base_laser坐标系。
以下图机器人与激光雷达为例
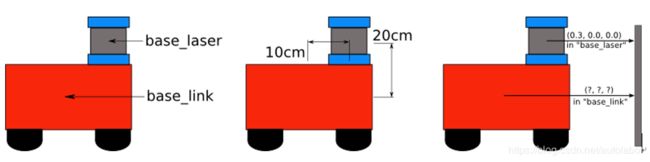
假设在机器人运行过程中,激光雷达可以采集到距离前方障碍物的数据,这些数据当然是以激光雷达为原点的测量值,换句话说,也就是base_laser参考系下的测量值。现在,如果我们想使用这些数据帮助机器人完成避障功能,当然,由于激光雷达在机器人之上,直接使用这些数据不会产生太大的问题,但是激光雷达并不在机器人的中心之上,在极度要求较高的系统中,会始终存在一个雷达与机器人中心的偏差值。这个时候,如果我们采用一种坐标变换,将激光数据从base_laser参考系变换到base_link参考下,问题不就解决了么。这里我们就需要定义这两个坐标系之间的变换关系。
下面以思岚激光雷达为例,讲解Autolabor Pro1与激光雷达的tf坐标变换。
补充知识:ROS坐标系
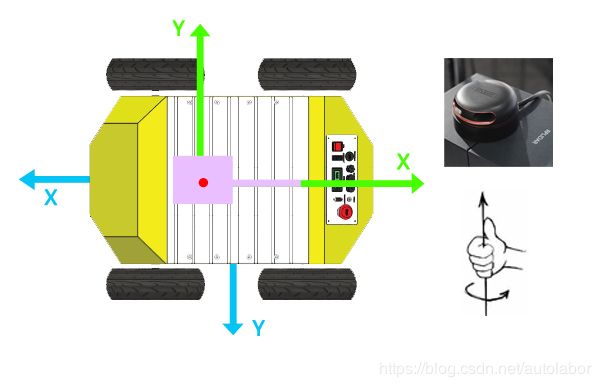
在ROS中,坐标轴规定可以参考 ROS-REP 103 ,坐标系可以参考 ROS-REP 105,常规用来表示三维位置关系时,使用的是右手坐标系,对于一个三维空间里面的旋转,可以分解成绕着坐标轴的旋转,旋转的方向使用右手法则定义。
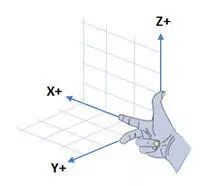
右手坐标系定义[^1]
把右手放在原点的位置,使大姆指,食指和中指互成直角,把 大姆指 指向 Z轴 的正方向,食指指向X轴的正方向时向时,中指所指的方向就是 Y轴 的正方向
通常相对于我们的身体而言
- X -> 朝前
- Y -> 朝左
- Z -> 朝上
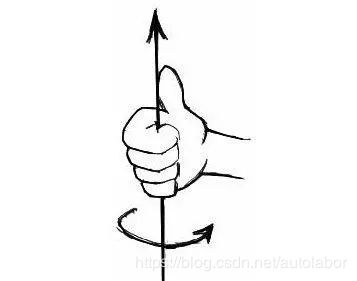
绕坐标轴旋转定义
用右手握住坐标轴,大拇指 的方向朝着坐标轴朝向的正方向,四指环绕的方向定义沿着这个坐标轴旋转的正方向
一般来说
- 绕 Z轴 旋转,称之为 航向角,使用yaw表示;
- 绕 X轴 旋转,称之为 横滚角,使用roll表示;
- 绕 Y轴 旋转,称之为 俯仰角,使用pitch表示;
我们通常用来表述小车运动的二维平面指的是 X-Y平面,也就是X轴和Y轴张成的平面,在这个平面中,用来描述 小车转弯的角就是绕Z轴的旋转,也就是经常说的航向角。Z轴朝上,所以按照右手法则可以知道小车向 左转为正,右转为负。
详细了解 | ROS坐标转换讲解 | Autolabor Simulation
Autolabor Pro1 base_link坐标系
以机器人四轮接触面为X-Y平面,四轮轴心连线的点做垂线,与x-y平面的交点为base_link坐标系原点,车头朝向方向为X轴,正左方向为Y轴,向上为Z轴。
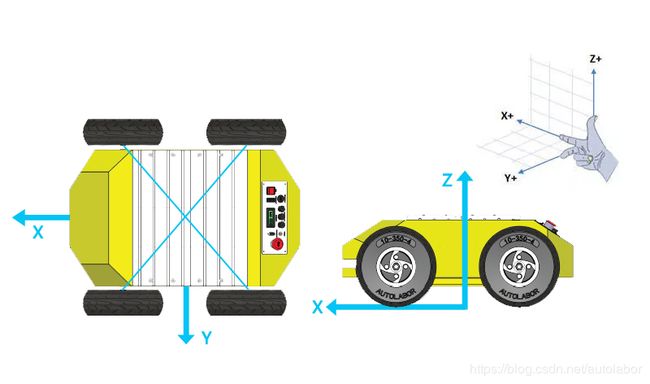
以思岚激光雷达为例,我们一般在安装时都习惯将雷达不带线的一端朝车头方向,雷达USB端的朝车尾方向(如下图)。
思岚激光雷达base_laser坐标系
雷达正中心为坐标原点,USB端的方向为X轴正方向,正左方向为Y轴,向上为Z轴。
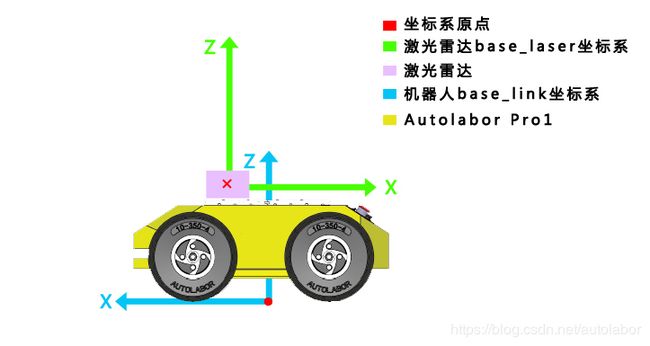
测量雷达中心相对机器人坐标原点(0,0,0)的距离,得到雷达在机器人坐标系中(x:0.1,y:0.0,z:0.2)(ROS中长度单位为米/m)。
前面我们提到,思岚雷达的X轴正方向与机器人的X轴正方向为相反方向,雷达坐标系需要绕Z轴顺时针旋转180度才能与机器人base_link坐标系重合 ,旋转(yaw:3.14,roll:0,pitch:0)(ROS中角度单位为弧度/rad)。
根据这些数据,当我们获取激光数据后,采用(x: 0.1m, y: 0.0m, z: 0.2m, yaw:3.14, roll:0, pitch:0)的坐标变换,就可以将数据从base_laser参考系变换到base_link参考系,这就定义出了两个参考系之间的变换关系。
从上边的示例看来,参考系之间的坐标变换好像并不复杂,但是在复杂的系统中,存在的参考系可能远远大于两个,如果我们都使用这种手动的方式进行变换,估计很快你就会被繁杂的坐标关系搞蒙了。ROS提供的tf变换就是为解决这个问题而生的,tf功能包提供了存储、计算不同数据在不同参考系之间变换的功能,我们只需要告诉tf树这些参考系之间的变换公式即可,这颗tf树就可以通过树的数据结构,管理我们所需要的参考系变换。
为了定义和存储base_link和base_laser两个参考系之间的关系,我们需要将他们添加到tf树中。从树的概念上来讲,tf树中的每个节点都对应一个参考系,而节点之间的边对应于参考系之间的变换关系。tf就是使用这样的树结构,保证每两个参考系之间只有一种遍历方式,而且所有变换关系,都是母节点到子节点的变换。
为了定义参考系,我们需要定义两个节点,一个对应于base_link参考系,一个对应于base_laser参考系。为了创建两个节点之间的边,我们首先需要决定哪一个节点作为母节点,哪一个节点作为子节点,这一点在tf树中是非常重要的。这里我们选择base_link作为母节点,这样会方便后边为机器人添加更多的传感器作为子节点。
详细了解 | TF坐标变换的学习
所以,从base_link节点到base_laser节点的变换关系为(x: 0.1m, y: 0.0m, z: 0.2m, yaw:3.14, roll:0, pitch:0),设置完毕后,我们就可以通过调用tf库,完成base_laser参考系到base_link参考系的数据坐标变换了。
如何发布tf变换关系
static_transform_publisher介绍
static_transform_publisher is designed both as a command-line tool for manual use, as well as for use within roslaunch files for setting static transforms.
我们最常使用的是tf包中的static_transform_publisher,它即可在命令行直接运行,也可写在launch文件中配置坐标转换关系。
Publish a static coordinate transform to tf using an x/y/z offset in meters and yaw/pitch/roll in radians. (yaw is rotation about Z, pitch is rotation about Y, and roll is rotation about X). The period, in milliseconds, specifies how often to send a transform. 100ms (10hz) is a good value.
使用示例:
这是我们最常看到的使用方法,写在launch文件中。
pkg:包名,tf
type:类型,static_transform_publisher
name:名称,自定,便于理解
arg:tf参数, x y z yaw pitch roll frame_id child_frame_id period_in_ms.
1.x y z 分别代表着相应轴的平移,单位是 米。
2.yaw pitch roll 分别代表着绕z y x 三个轴的转动,单位是 弧度。
3.frame_id 为坐标系变换中的父坐标系, child_frame_id为坐标系变换中的子坐标系。
4.period_in_ms 为发布频率,单位为 毫秒。通常取100。一毫秒为一秒的千分之一,100毫秒即为0.1秒,也就是10Hz。
按照前文的数据,args处参数修改为
0.1 0.0 0.2 3.14 0.0 0.0 /base_link /lidar 50
说明:传感器的frame_id的名称根据厂商或有不同,一般在驱动启动launch可查看,思岚激光雷达的frame_id为/lidar。
详细了解 | tf之static_transform_publisher