CS231n: Lecture 9 | CNN Architectures Summary
Lecture 9主要讲了一些经典的、比较流行的网络结构,详细讲解了AlexNet、ZFNet、VGGNet、GoogleNet和ResNet。
文章目录
- AlexNet
-
- 网络详细信息如下
- AlexNet网络特点
- ZFNet
-
- ZFNet网络特点
- VGGNet
-
- VGG16网络详细信息如下
- VGGNet网络特点
- GoogleNet
-
- GoogleNet网络特点
- “inception” module
- “blottleneck”
- Auxiliary classification outputs
- ResNet
-
- ResNet网络特点:
- 残差盒(Residual block)
- 扩展
-
- Network in Network(NiN)
- Identity Mappings in Deep Residual Networks
- Wide Residual Networks
- ResNeXt
- Deep Networks with Stochastic Depth
- FractalNet
- DenseNet
- SqueezeNet
AlexNet
AlexNet网络结构图如下图所示:
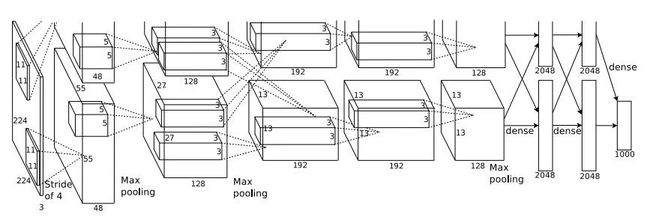
网络详细信息如下
[227x227x3] INPUT
[55x55x96] CONV1: 96 11x11 filters at stride 4, pad 0
[27x27x96] MAX POOL1: 3x3 filters at stride 2
[27x27x96] NORM1: Normalization layer
[27x27x256] CONV2: 256 5x5 filters at stride 1, pad 2
[13x13x256] MAX POOL2: 3x3 filters at stride 2
[13x13x256] NORM2: Normalization layer
[13x13x384] CONV3: 384 3x3 filters at stride 1, pad 1
[13x13x384] CONV4: 384 3x3 filters at stride 1, pad 1
[13x13x256] CONV5: 256 3x3 filters at stride 1, pad 1
[6x6x256] MAX POOL3: 3x3 filters at stride 2
[4096] FC6: 4096 neurons
[4096] FC7: 4096 neurons
[1000] FC8: 1000 neurons (class scores)
AlexNet网络特点
- First use of ReLU;
- Used Norm layers (not common anymore);
- Heavy data augmentation;
- Dropout 0.5;
- Batch size 128;
- SGD Momentum 0.9;
- Learning rate 1e-2, reduced by 10 manually when val accuracy plateaus;
- L2 weight decay 5e-4(正则化的权重衰减);
- 7 CNN ensemble: 18.2% -> 15.4%(模型集成,取平均)。
由于当时所使用GPU的显存不够存放这么多参数,因此从第一个卷积层开始将参数分为两组,在两个GPU中训练,如第一个卷积层中参数被分为两组,每组有 11 × 11 × 3 × 48 11\times11\times3\times48 11×11×3×48个参数。
ZFNet
ZFNet网络结构图如下图所示:

ZFNet网络特点
- ZFNet框架大体与AlexNet一致;
- CONV1:Change from ( 11 × 11 11\times11 11×11 stride 4) to ( 7 × 7 7\times7 7×7 stride 2);
- CONV3,4,5:Use 384,384,256 filters, instead of 512,1024,512 filters.
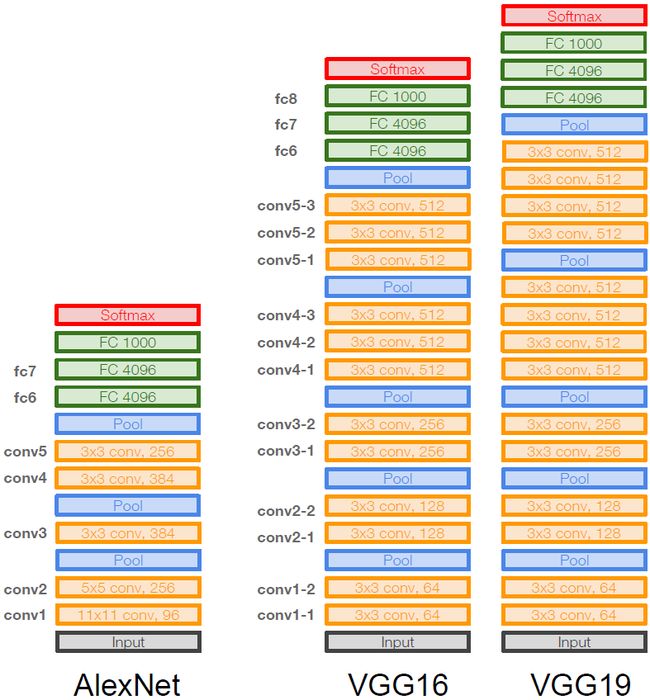
VGGNet
VGGNet网络结构图如下图所示:
VGG16网络详细信息如下
INPUT: [224x224x3] memory: 224x224x3=150K params: 0
CONV3-64: [224x224x64] memory: 224x224x64=3.2M params: (3x3x3)x64 = 1,728
CONV3-64: [224x224x64] memory: 224x224x64=3.2M params: (3x3x64)x64 = 36,864
POOL2: [112x112x64] memory: 112x112x64=800K params: 0
CONV3-128: [112x112x128] memory: 112x112x128=1.6M params: (3x3x64)x128 = 73,728
CONV3-128: [112x112x128] memory: 112x112x128=1.6M params: (3x3x128)x128 = 147,456
POOL2: [56x56x128] memory: 56x56x128=400K params: 0
CONV3-256: [56x56x256] memory: 56x56x256=800K params: (3x3x128)x256 = 294,912
CONV3-256: [56x56x256] memory: 56x56x256=800K params: (3x3x256)x256 = 589,824
CONV3-256: [56x56x256] memory: 56x56x256=800K params: (3x3x256)x256 = 589,824
POOL2: [28x28x256] memory: 28x28x256=200K params: 0
CONV3-512: [28x28x512] memory: 28x28x512=400K params: (3x3x256)x512 = 1,179,648
CONV3-512: [28x28x512] memory: 28x28x512=400K params: (3x3x512)x512 = 2,359,296
CONV3-512: [28x28x512] memory: 28x28x512=400K params: (3x3x512)x512 = 2,359,296
POOL2: [14x14x512] memory: 14x14x512=100K params: 0
CONV3-512: [14x14x512] memory: 14x14x512=100K params: (3x3x512)x512 = 2,359,296
CONV3-512: [14x14x512] memory: 14x14x512=100K params: (3x3x512)x512 = 2,359,296
CONV3-512: [14x14x512] memory: 14x14x512=100K params: (3x3x512)x512 = 2,359,296
POOL2: [7x7x512] memory: 7x7x512=25K params: 0
FC: [1x1x4096] memory: 4096 params: 7x7x512x4096 = 102,760,448
FC: [1x1x4096] memory: 4096 params: 4096x4096 = 16,777,216
FC: [1x1x1000] memory: 1000 params: 4096x1000 = 4,096,000
VGGNet网络特点
- 更小的filters,更深的网络;
- Only 3x3 CONV stride 1, pad 1 and 2x2 MAX POOL stride 2;
- 倒数第二层FC(FC7,1000个,即类别层之前)的hidden number=4096被验证已经能够很好地进行特征表达,可以用于在其他数据中提取特征,并有比较好的泛化性能;
- 作者先训练了一个11层的网络,使其收敛,之后将其扩展到16/19层,以此来解决深层网络收敛困难的问题(Batch Normalization提出后就不需要这种操作了);
- 为何使用小的filters(3x3 CONV):3个3x3的卷积层和1个7x7的卷积层拥有同样有效的感受野(解析可见https://blog.csdn.net/program_developer/article/details/80958716),但是其更深,更非线性化,且其参数数量更少,单层参数数量分别为3x(3x3xCxC)<7x7xCxC(C为channel数量).
GoogleNet
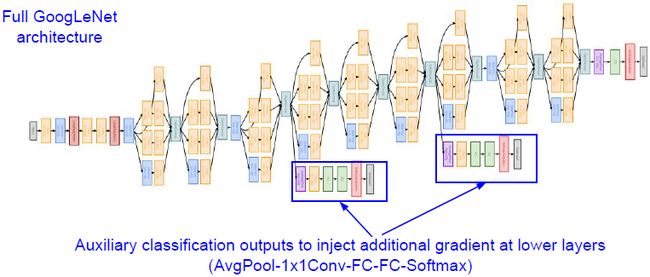
GoogleNet网络结构图如下图所示:
GoogleNet网络特点
- 22层网络;
- 没有FC层;
- 为提高计算效率引入了“inception” module和“bottleneck”的概念;
- 网络有两个辅助输出(Auxiliary classification outputs)用于向低层的网络注入额外的梯度,以此解决网络收敛困难的问题(Batch Normalization提出后就不需要这种操作了);
- 仅有5million个参数,比AlexNet少12倍。
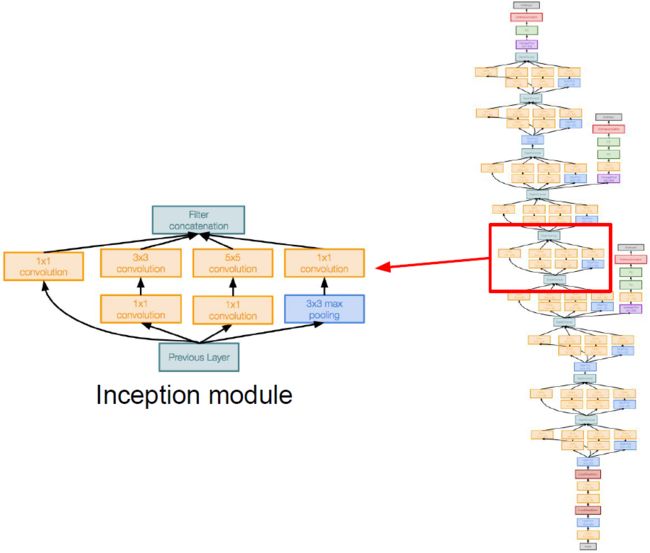
“inception” module
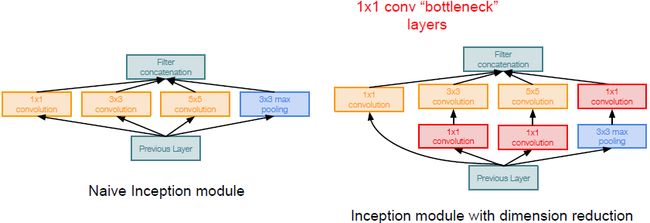
可以将网络看成是由局部网络拓扑(“inception” module)堆叠而成。对进入相同层的相同输入并行应用不同类别的滤波操作。我们将来自前面层的输入进行不同的卷积操作、池化操作,从而得到不同的输出,最后需要将所有输出在深度层面上连接到一起。计算与串联方式如下图所示:
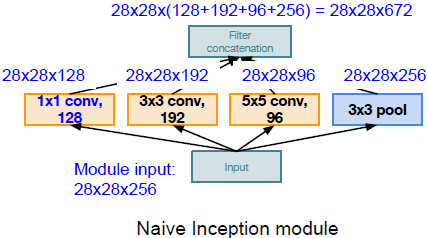
“blottleneck”
使用 “inception” module 后随之而来的问题就是:
- 单层的参数就达到854M个,计算量极大;
- 且数据经过每一个 “inception” module 后深度都会增加(光池化层得到输出数据的尺寸就已经与原数据相同)。
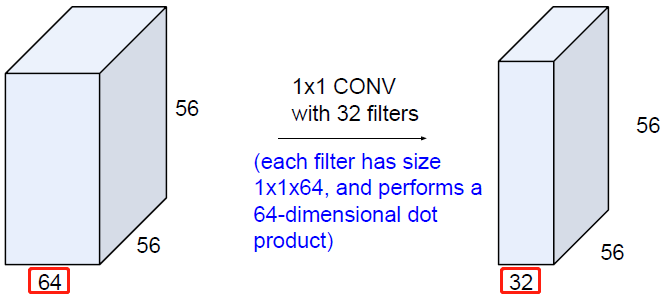
为解决上述问题,构建了称之为“bottleneck”的1x1卷积层以减少特征深度(如下图所示):
改进后的“inception” module如下图所示:
Auxiliary classification outputs
GoogleNet同时拥有两个辅助输出,可以对前面几个层进行更多的梯度训练。当网络深度很深的时候,一些梯度信号会最小化并且丢失了前面几层的梯度信号,该方法能在一定层度上解决梯度消失的问题。
ResNet
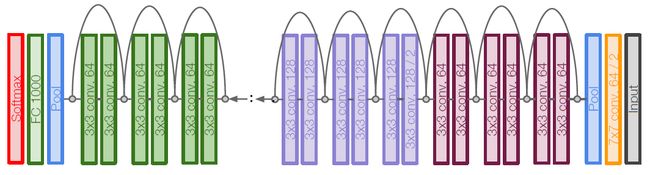
ResNet网络结构图如下图所示:
ResNet网络特点:
- 152层;
- 利用残差层实现优化;
- 网络由残差盒堆叠而成(每一个残差盒包含两个3x3 CONV);
- 如果将残差盒中的所有权重置零,那么残差盒的输出与输入就是相等的,因此,在某种层度上,这个模型是相对容易去训练的,并不需要添加额外的层;
- 神经网络中添加L2正则化的作用是迫使网络中的所有参数趋近于0,其他网络结构(如CONV)参数趋于0不太说得通。但在残差网络中,如果所有参数趋于0,那就是促使模型不再使用他不需要的层,因为它只趋使残差盒趋向同一性,也就不需要进行分类;
- 残差连接在反向传播时,为梯度提供了一个超级“高速通道”(梯度经过残差盒的加法门分流然后汇总),这使得网络训练更加容易(DenseNet和FractalNet也有类似的梯度直传式的连接);
- 周期性的,会使用两倍数量的filters,用stride 2 CONV进行下采样(所有维度/2);
- 网络起始处有一个额外的CONV;
- 没有额外的FC;
- 只有一个全局的AVE POOL;
- 每一个CONV后都带有一个BN;
- 用一个额外的带尺度因子的Xavier/2去初始化;
- 初始学习率为0.1,当Validation error停滞时,将其缩小十倍;
- Mini-batch size = 256;
- Weight decay = 1e-5.
残差盒(Residual block)
当我们在普通神经网络上堆叠越来越多的层时到底会发生什么?

由上图实验结果可知,56层网络的训练误差和测试误差都高于20层的网络。但是为何56层本应发生过拟合的NN的训练误差不如20层的NN呢,它最差也应该和20层的NN性能一样才对?
本文作者假设:这是一个优化问题,层深的模型更难优化。于是,作者提出了残差网络的概念,其与常规网络的区别如下图所示:
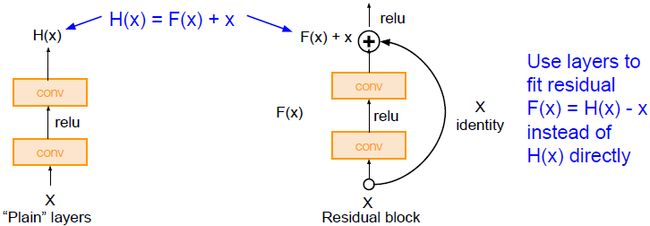
Residual block使这些网络层拟合的是残差映射H(x)-x而不是直接映射H(x)。某种意义上可以看成是一种对输入的修正。学习残差映射你只需知道什么是∆x=H(x)-x,通常来说,很多网络层之间实际上都是相差无几的,通过学习一个恒等映射加上很小的∆x(若恒等映射是最好的,只需将∆x置零),这样更容易学习。
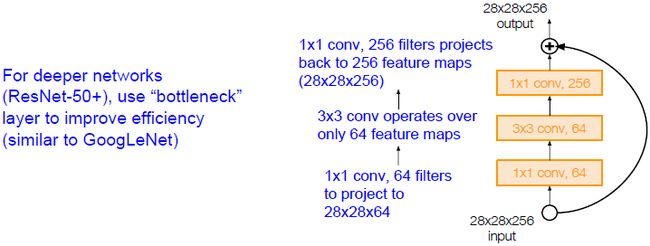
与GoogleNet类似,如果网络层数较多的话,ResNet的残差盒会使用“bottleneck”来加速计算(如下图所示)。
扩展
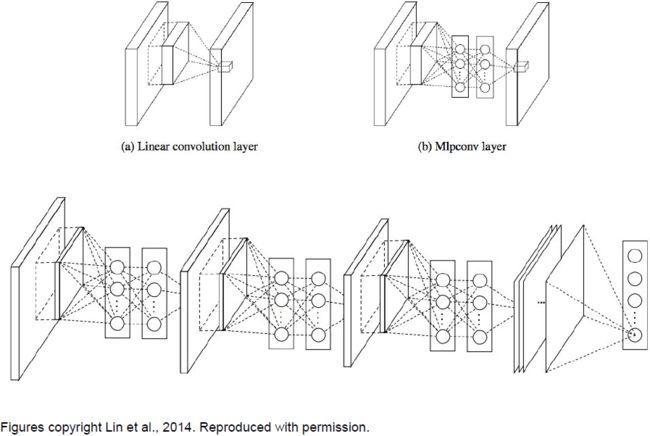
Network in Network(NiN)
每个卷积层中都有一个完全连接的MLP(micronetwork),以计算局部图像块的更多抽象特征。这个模型是GoogleNet和ResNet模型“bottleneck”的灵感来源。
Identity Mappings in Deep Residual Networks
在ResNet的基础上进行修改,新的结构能够实现一种更直接的路径用于在整个网络中传播信息(将激活层移动到残差映射路径中)。

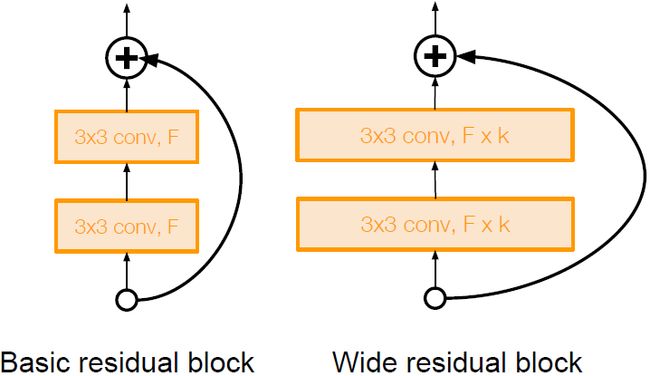
Wide Residual Networks
作者认为残差量是一个十分重要的因素而不是深度。使用了更宽的残差模块(FxK filters而不是F filters in each layer),宽网络的另一个优点是便于使用并行计算。本文旨在比较网络的宽度、深度和残差连接所做出的的贡献。
ResNeXt
通过多条平行路径增加残差盒宽度,这些分支总和被称为“cardinality”,思想类似于“inception”module。

Deep Networks with Stochastic Depth
动机是在训练过程中通过短网络减少消失梯度和训练时间。该思想类似于Dropout,只不过这里是沿网络深度方向的dropout。方法是在每次训练中随机drop某层子集(即ResNet中∆x=0,该层为恒等映射),在测试时使用完整的训练好的网络。
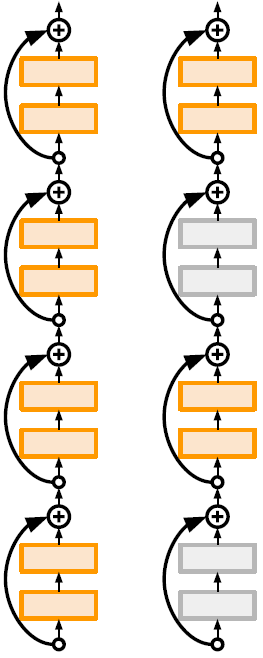
FractalNet
作者认为引入残差可能不是必须的,关键在于有效地从浅层网络转型为深层网络。因此他使用了上图所示这种分型结构,各层都以分形的形式存在,因此同时存在浅层和深层路径到大输出值。他们通过抛弃子路径的方式训练,类似于dropout,测试时使用整个分形网络。

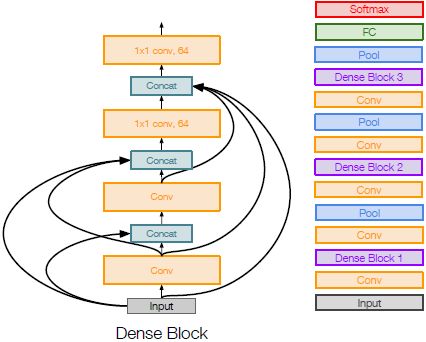
DenseNet
密集连接卷积神经网络。每个Dense block中每层都与其后的所有层以前馈的形式连接,因此在这个Dense block内,你对其的输入也是对所有其他各层的输入,你会计算每一个卷积输出,这些输出与其后的所有层连接,所有这些值集中起来,共同作为卷积层的输入。这一方法能缓解梯度消失的问题,加强特征图的传递,鼓励特征重用。
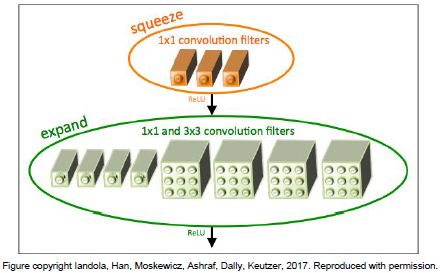
SqueezeNet
由一个个fire模块组成,每个fire模块都含有一个squeeze层,其由许多1x1的filters组成。接着,它再传递给一个扩大层含有一些1x1和3x3的filters。参数只有AlexNet的1/50,性能相似。
本博客与https://xuyunkun.com同步更新