SSD算法原理与代码(三)
说明:这几篇文章是讲解SSD,从算法原理、代码到部署到rk3588芯片上的过程。环境均是TF2.2,具体的安装过程请参考网上其他的文章。
一、SSD简介
SSD算法是一个优秀的one-stage目标检测算法。能够一次就完成目标的检测和分类过程。主要是的思路是利用CNN提前特征之后,在图像上进行不同位置的密集抽样,抽样时采用不同尺度和长宽比,物体分类和预测框回归同时完成,所以速度很快。
二、SSD实现思路
1. 主干网络
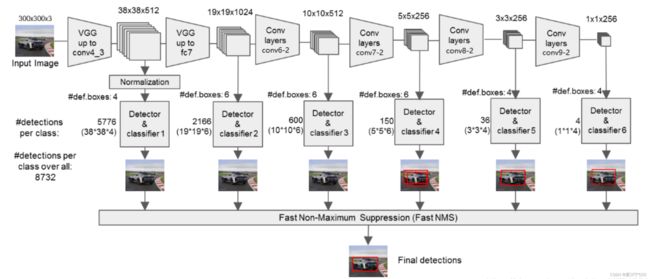
图1 SSD结构图
这张图,清楚的表明了SSD的网络结构。SSD的主干网络是VGG,但对VGG进行了修改,主要是:
1) 将VGG的FC6、FC7转化为卷积层
2)去掉所有的Dropout和F8层
3)新增了Conv6、Conv7、Conv8、Conv9
总的过程:
1)输入:输入的图像为300×300×3(RGB三个通道)
2)Conv1,两次[3, 3]卷积,输出[300,300,64],再[2,2]最大池化,步长为2,输出[150,150,64]
3)Conv2,两次[3, 3]卷积,输出[150,150,128],再[2,2]最大池化,步长为2,输出[75,75,128]
4)Conv3,三次[3, 3]卷积,输出[75,75,256],再[2,2]最大池化,步长为2,输出[38,38,256]
5)Conv4,三次[3, 3]卷积,输出[38,38,512],再[2,2]最大池化,步长为2,输出[19,19,512]
6)Conv5,三次[3, 3]卷积,输出[19,19,512],再[3,3]最大池化,步长为1,输出[19,19,512]
7)FC6、FC7,一次[3,3]卷积和一次[1,1]卷积,输出通道为1024,输出[19,19,1024]
8) Conv6,一次[1,1]卷积,调整通道数,一次步长2的[3,3]卷积,输出[10,10,512]
8) Conv7,一次[1,1]卷积,调整通道数,一次步长2的[3,3]卷积,输出[5,5,256]
9) Conv8,一次[1,1]卷积,调整通道数,一次padding为valid的[3,3]卷积,输出[3,3,256]
10) Conv9,一次[1,1]卷积,调整通道数,一次padding为valid的[3,3]卷积,输出[1,1,256]
2. 主干网络代码
SSD的网络整体结构比较清晰,下面是是实现代码
class Normalize(Layer):
def __init__(self, scale, **kwargs):
self.axis = 3
self.scale = scale
super(Normalize, self).__init__(**kwargs)
def build(self, input_shape):
self.input_spec = [InputSpec(shape=input_shape)]
shape = (input_shape[self.axis],)
init_gamma = self.scale * np.ones(shape)
self.gamma = K.variable(init_gamma, name='{}_gamma'.format(self.name))
def call(self, x, mask=None):
output = K.l2_normalize(x, self.axis)
output *= self.gamma
return output
# class_num是检测的目标种类,必须有
# input_shape一般为[300, 300, 3]
def ssd_net(class_num, input_shape=[300, 300, 3], weight_decay=5e-4):
# ssd的前几层网络是vgg,
input_tensor = Input(shape=input_shape)
print('input_tensor: ' + str(input_tensor))
# SSD网络模型 net是字典
net = {}
# Block 0 输入层
net['input'] = input_tensor
# Block 1 300,300,3 -> 150,150,64
# 2次[3, 3]网络卷积,输出的特征层为64,输出为[300, 300, 64],再2×2最大池化,该最大池化步长为2,输出为[150, 150, 64]
net['conv1_1'] = Conv2D(64, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv1_1')(net['input'])
net['conv1_2'] = Conv2D(64, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv1_2')(
net['conv1_1'])
net['pool1'] = MaxPooling2D((2, 2), strides=(2, 2), padding='same', name='pool1')(net['conv1_2'])
# Block 2 150,150,64 -> 75,75,128
# 2次[3, 3]网络卷积,输出的特征层为128,输出为[150, 150, 128],再2×2最大池化,该最大池化步长为2,输出为[75, 75, 128]
net['conv2_1'] = Conv2D(128, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv2_1')(
net['pool1'])
net['conv2_2'] = Conv2D(128, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv2_2')(
net['conv2_1'])
net['pool2'] = MaxPooling2D((2, 2), strides=(2, 2), padding='same', name='pool2')(net['conv2_2'])
# Block 3 75,75,128 -> 38,38,256
# 3次[3, 3]网络卷积,输出的特征层为256,输出为[75, 75, 256],再2×2最大池化,该最大池化步长为2,输出为[38, 38, 256]
net['conv3_1'] = Conv2D(256, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv3_1')(
net['pool2'])
net['conv3_2'] = Conv2D(256, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv3_2')(
net['conv3_1'])
net['conv3_3'] = Conv2D(256, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv3_3')(
net['conv3_2'])
net['pool3'] = MaxPooling2D((2, 2), strides=(2, 2), padding='same', name='pool3')(net['conv3_3'])
# Block 4 38,38,256 -> 19,19,512
# 3次[3, 3]网络卷积,输出的特征层为512,输出为[38, 38, 512],再2×2最大池化,该最大池化步长为2,输出为[19, 19, 512]
net['conv4_1'] = Conv2D(512, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv4_1')(
net['pool3'])
net['conv4_2'] = Conv2D(512, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv4_2')(
net['conv4_1'])
net['conv4_3'] = Conv2D(512, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv4_3')(
net['conv4_2'])
net['pool4'] = MaxPooling2D((2, 2), strides=(2, 2), padding='same', name='pool4')(net['conv4_3'])
# Block 5 19,19,512 -> 19,19,512
# 3次[3, 3]网络卷积,输出的特征层为512,输出为[19, 19, 512],再3×3最大池化,该最大池化步长为1,输出为[19, 19, 512]
net['conv5_1'] = Conv2D(512, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv5_1')(
net['pool4'])
net['conv5_2'] = Conv2D(512, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv5_2')(
net['conv5_1'])
net['conv5_3'] = Conv2D(512, kernel_size=(3, 3), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv5_3')(
net['conv5_2'])
net['pool5'] = MaxPooling2D((3, 3), strides=(1, 1), padding='same', name='pool5')(net['conv5_3'])
# FC6 19,19,512 -> 19,19,1024
# 1次[3, 3]网络卷积,1次[1, 1]网络卷积,分别为fc6和fc7,输出的特征层为1024,输出为[19, 19, 1024]
net['fc6'] = Conv2D(1024, kernel_size=(3, 3), dilation_rate=(6, 6), activation='relu', padding='same',
kernel_regularizer=l2(weight_decay), name='fc6')(net['pool5'])
# FC7 19,19,1024 -> 19,19,1024
net['fc7'] = Conv2D(1024, kernel_size=(1, 1), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='fc7')(net['fc6'])
# ---------------------- 以上是VGG网络(fc6、fc7有修改)------------------------ #
# Block 6 19,19,512 -> 10,10,512
# 1次[1, 1]网络卷积,调整通道数,1次步长为2的[3, 3]卷积网络,输出通道为512,输出为[10, 10, 512]
net['conv6_1'] = Conv2D(256, kernel_size=(1, 1), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv6_1')(net['fc7'])
# 表示将上一层的输出上下左右补充一行(一列)0,行数+2,列数+2。
# Zeropadding2D即为2D输入的零填充层。为2D输入的零填充层,
# 为下一层卷积做准备,保证卷积之后,尺寸不变
net['conv6_2'] = ZeroPadding2D(padding=((1, 1), (1, 1)), name='conv6_padding')(net['conv6_1'])
net['conv6_2'] = Conv2D(512, kernel_size=(3, 3), strides=(2, 2), activation='relu', kernel_regularizer=l2(weight_decay), name='conv6_2')(
net['conv6_2'])
# Block 7 10,10,512 -> 5,5,256
# 1次[1, 1]网络卷积,调整通道数,1次步长为2的[3, 3]卷积网络,输出通道为256,输出为[5, 5, 256]
net['conv7_1'] = Conv2D(128, kernel_size=(1, 1), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv7_1')(
net['conv6_2'])
net['conv7_2'] = ZeroPadding2D(padding=((1, 1), (1, 1)), name='conv7_padding')(net['conv7_1'])
net['conv7_2'] = Conv2D(256, kernel_size=(3, 3), strides=(2, 2), activation='relu', padding='valid', kernel_regularizer=l2(weight_decay),
name='conv7_2')(net['conv7_2'])
# Block 8 5,5,256 -> 3,3,256
# 1次[1, 1]网络卷积,调整通道数,1次padding为valid的[3, 3]卷积网络,输出通道为256,输出为[3, 3, 256]
net['conv8_1'] = Conv2D(128, kernel_size=(1, 1), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv8_1')(
net['conv7_2'])
net['conv8_2'] = Conv2D(256, kernel_size=(3, 3), strides=(1, 1), activation='relu', padding='valid', kernel_regularizer=l2(weight_decay),
name='conv8_2')(net['conv8_1'])
# Block 9 3,3,256 -> 1,1,256
# 1次[1, 1]网络卷积,调整通道数,1次padding为valid的[3, 3]卷积网络,输出通道为256,输出为[1, 1, 256]
net['conv9_1'] = Conv2D(128, kernel_size=(1, 1), activation='relu', padding='same', kernel_regularizer=l2(weight_decay), name='conv9_1')(
net['conv8_2'])
net['conv9_2'] = Conv2D(256, kernel_size=(3, 3), strides=(1, 1), activation='relu', padding='valid', kernel_regularizer=l2(weight_decay),
name='conv9_2')(net['conv9_1'])
# ----------------------------主干特征提取网络结束--------------------------- #
# -----------------------将提取到的主干特征进行处理--------------------------- #
# 对conv4_3的通道进行l2标准化处理
# 38,38,512
net['conv4_3_norm'] = Normalize(20, name='conv4_3_norm')(net['conv4_3'])
num_priors = 4
# 预测框的处理
# num_priors表示每个网格点先验框的数量,4是x,y,h,w的调整
net['conv4_3_norm_mbox_loc'] = Conv2D(num_priors * 4, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay),
name='conv4_3_norm_mbox_loc')(net['conv4_3_norm'])
net['conv4_3_norm_mbox_loc_flat'] = Flatten(name='conv4_3_norm_mbox_loc_flat')(net['conv4_3_norm_mbox_loc'])
# num_priors表示每个网格点先验框的数量,class_num是所分的类
net['conv4_3_norm_mbox_conf'] = Conv2D(num_priors * class_num, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay),
name='conv4_3_norm_mbox_conf')(net['conv4_3_norm'])
net['conv4_3_norm_mbox_conf_flat'] = Flatten(name='conv4_3_norm_mbox_conf_flat')(net['conv4_3_norm_mbox_conf'])
# 对fc7层进行处理
# 19,19,1024
num_priors = 6
# 预测框的处理
# num_priors表示每个网格点先验框的数量,4是x,y,h,w的调整
net['fc7_mbox_loc'] = Conv2D(num_priors * 4, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay), name='fc7_mbox_loc')(
net['fc7'])
net['fc7_mbox_loc_flat'] = Flatten(name='fc7_mbox_loc_flat')(net['fc7_mbox_loc'])
# num_priors表示每个网格点先验框的数量,class_num是所分的类
net['fc7_mbox_conf'] = Conv2D(num_priors * class_num, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay), name='fc7_mbox_conf')(
net['fc7'])
net['fc7_mbox_conf_flat'] = Flatten(name='fc7_mbox_conf_flat')(net['fc7_mbox_conf'])
# 对conv6_2进行处理
# 10,10,512
num_priors = 6
# 预测框的处理
# num_priors表示每个网格点先验框的数量,4是x,y,h,w的调整
net['conv6_2_mbox_loc'] = Conv2D(num_priors * 4, kernel_size=(3, 3), padding='same',kernel_regularizer=l2(weight_decay), name='conv6_2_mbox_loc')(
net['conv6_2'])
net['conv6_2_mbox_loc_flat'] = Flatten(name='conv6_2_mbox_loc_flat')(net['conv6_2_mbox_loc'])
# num_priors表示每个网格点先验框的数量,class_num是所分的类
net['conv6_2_mbox_conf'] = Conv2D(num_priors * class_num, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay),
name='conv6_2_mbox_conf')(net['conv6_2'])
net['conv6_2_mbox_conf_flat'] = Flatten(name='conv6_2_mbox_conf_flat')(net['conv6_2_mbox_conf'])
# 对conv7_2进行处理
# 5,5,256
num_priors = 6
# 预测框的处理
# num_priors表示每个网格点先验框的数量,4是x,y,h,w的调整
net['conv7_2_mbox_loc'] = Conv2D(num_priors * 4, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay), name='conv7_2_mbox_loc')(
net['conv7_2'])
net['conv7_2_mbox_loc_flat'] = Flatten(name='conv7_2_mbox_loc_flat')(net['conv7_2_mbox_loc'])
# num_priors表示每个网格点先验框的数量,class_num是所分的类
net['conv7_2_mbox_conf'] = Conv2D(num_priors * class_num, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay),
name='conv7_2_mbox_conf')(net['conv7_2'])
net['conv7_2_mbox_conf_flat'] = Flatten(name='conv7_2_mbox_conf_flat')(net['conv7_2_mbox_conf'])
# 对conv8_2进行处理
# 3,3,256
num_priors = 4
# 预测框的处理
# num_priors表示每个网格点先验框的数量,4是x,y,h,w的调整
net['conv8_2_mbox_loc'] = Conv2D(num_priors * 4, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay), name='conv8_2_mbox_loc')(
net['conv8_2'])
net['conv8_2_mbox_loc_flat'] = Flatten(name='conv8_2_mbox_loc_flat')(net['conv8_2_mbox_loc'])
# num_priors表示每个网格点先验框的数量,class_num是所分的类
net['conv8_2_mbox_conf'] = Conv2D(num_priors * class_num, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay),
name='conv8_2_mbox_conf')(net['conv8_2'])
net['conv8_2_mbox_conf_flat'] = Flatten(name='conv8_2_mbox_conf_flat')(net['conv8_2_mbox_conf'])
# 对conv9_2进行处理
# 1,1,256
num_priors = 4
# 预测框的处理
# num_priors表示每个网格点先验框的数量,4是x,y,h,w的调整
net['conv9_2_mbox_loc'] = Conv2D(num_priors * 4, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay), name='conv9_2_mbox_loc')(
net['conv9_2'])
net['conv9_2_mbox_loc_flat'] = Flatten(name='conv9_2_mbox_loc_flat')(net['conv9_2_mbox_loc'])
# num_priors表示每个网格点先验框的数量,class_num是所分的类
net['conv9_2_mbox_conf'] = Conv2D(num_priors * class_num, kernel_size=(3, 3), padding='same', kernel_regularizer=l2(weight_decay),
name='conv9_2_mbox_conf')(net['conv9_2'])
net['conv9_2_mbox_conf_flat'] = Flatten(name='conv9_2_mbox_conf_flat')(net['conv9_2_mbox_conf'])
# 最终的模型,输入层是net['input'],输出层为net['predictions']
model = Model(net['input'], net['predictions'])
# print('add net finish!')
return model
到这里这里,图1中最上部横着的主干网络基本介绍完了。这个部分主要用来提取特征,下面开始介绍使用特征部分。
在图1中,可以看到,Conv4第三次卷积、FC7、Conv6第二次卷积、Conv7第二次卷积、Conv8第二次卷积、Conv9第二次卷积,都往下走,这6层得到的结果将进一步处理,通过他们得到不同尺寸的特征结果。这部分也是SSD算法能够识别不同尺寸物体的原因。
3.先验框
在进一步说明上述六层特征层之前,先说明下先验框。
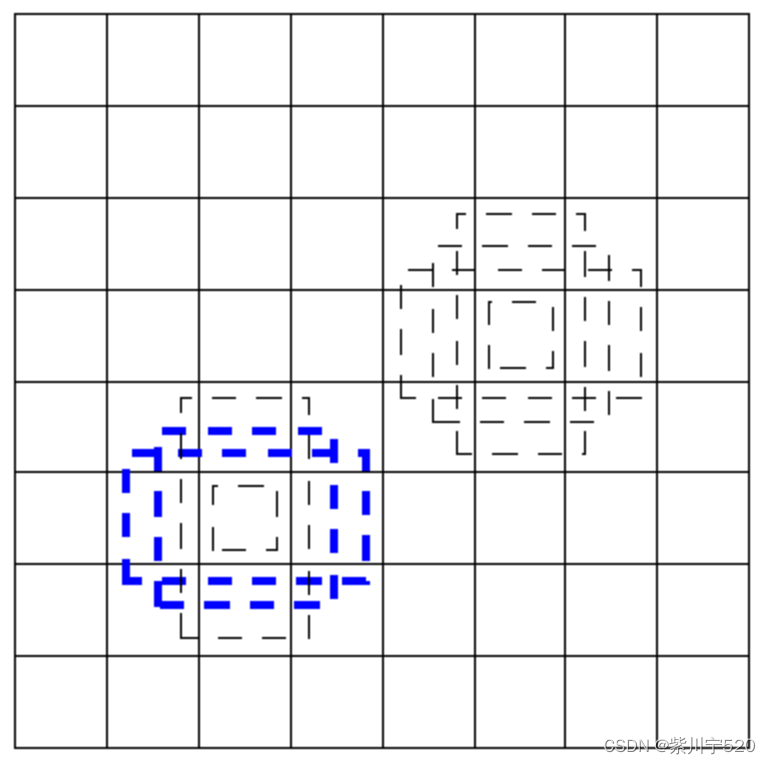
图2 分成8×8
假设一张图[300,300],分成[8,8](注:SSD网络部分没有图像是分成[8,8],仅仅举例使用) 先验框就是图2中虚线部分。假设物体在左下方四个虚线框框里面,则通过这四个虚线框框能够找到物体。四个虚线框框尺寸不是固定,具体的参数需要训练。无论物体多大,总能够通过将图像分成某个比例,有一个虚线框框将其框住(仅仅简单说明,实际上还有一个图像放不下一个物体、物体只有一部分在图像中) 。所以,训练SSD模型,实际上就是训练虚线框框(x,y,w,h)这四个参数与实际物体的关系。而实际物体的具体(x,y,w,h)是提取通过软件标注好。加上物体的名字,一共是(x,y,w,h,name)五个参数。
这些虚线框框,叫做先验框,训练SSD模型,就是训练这些先验框的参数。在SSD中,不是直接训练(x,y,w,h) ,而是训练物体真实坐标与提取设定好先验框(x0,y0,w0,h0)之间的比例关系。训练之前需要转化一次,预测时,也需要将结果转化回来并显示。
对于六层特征层,先验框每一个像素点设置的数量为[4,6,6,6,4,4](每一层分好之后,分辨率都不一样)
对于Conv4来说,图像变成了[38,38]分辨率(与刚才说明的[8,8]相对应),每个像素点的先验框数量为4,则该层的先验框数量为38×38×4=5776。同理,其他的几层先验框数量分别为2166,600,150,36,4,一共8732个。所以,可以说,SSD模型,实际就是在[300,300]大小的图像上,设置一共8732个先验框,每个先验框大小、位置不同,去识别物体。对于一个物体来说,可能被多个先验框识别出来,因此,需要对识别出来的先验框进行非极大值抑制操作,选择最合适的做为最终结果。
对于这六层特征层来说,每一层都需要进行anchors_num×4的卷积(上面说的就是这个过程,4我理解的表示(x,y,w,h)),除此之外,还需要进行anchors_num×classes_num的卷积,用于预测物体的种类,每个先验框都有自己的物体种类名字。
先验框部分代码,这部分是获取8732个先验框
# 计算每个有效特征层的anchor box
# 六层分别为
# 38*38*4 19*19*6 10*10*6 5*5*6 3*3*4 1*1*4
# 5576 2166 600 150 36 4
class AnchorBox():
def __init__(self, input_shape, min_size, max_size=None, aspect_ratios=None, flip=True):
self.input_shape = input_shape
self.min_size = min_size
self.max_size = max_size
self.aspect_ratios = [] # aspect_ratios 结果 [1, 1.0, 2, 0.5]
for ar in aspect_ratios:
self.aspect_ratios.append(ar)
self.aspect_ratios.append(1.0 / ar)
# print('AnchorBox aspect_ratios ' + str(self.aspect_ratios))
def call(self, layer_shape, mask=None):
# --------------------------------- #
# 获取输入进来的特征层的宽和高
# 比如38x38
# --------------------------------- #
layer_height = layer_shape[0]
layer_width = layer_shape[1]
# print('AnchorBox layer_height ' + str(layer_height))
# print('AnchorBox layer_width ' + str(layer_width))
# --------------------------------- #
# 获取输入进来的图片的宽和高
# 比如300x300
# --------------------------------- #
img_height = self.input_shape[0]
img_width = self.input_shape[1]
# print('AnchorBox img_height ' + str(img_height))
# print('AnchorBox img_width ' + str(img_width))
box_widths = []
box_heights = []
# --------------------------------- #
# self.aspect_ratios一般有两个值
# [1, 1, 2, 1/2]
# [1, 1, 2, 1/2, 3, 1/3]
# --------------------------------- #
for ar in self.aspect_ratios:
# print('AnchorBox box_widths ' + str(len(box_widths)))
# 首先添加一个较小的正方形
if ar == 1 and len(box_widths) == 0:
box_widths.append(self.min_size)
box_heights.append(self.min_size)
# 然后添加一个较大的正方形
elif ar == 1 and len(box_widths) > 0:
box_widths.append(np.sqrt(self.min_size * self.max_size))
box_heights.append(np.sqrt(self.min_size * self.max_size))
# 然后添加长方形
elif ar != 1:
box_widths.append(self.min_size * np.sqrt(ar))
box_heights.append(self.min_size / np.sqrt(ar))
# print('AnchorBox box_widths ' + str(box_widths))
# print('AnchorBox box_heights ' + str(box_heights))
# --------------------------------- #
# 获得所有先验框的宽高1/2
# --------------------------------- #
box_widths = 0.5 * np.array(box_widths)
box_heights = 0.5 * np.array(box_heights)
# print('AnchorBox box_widths ' + str(box_widths))
# print('AnchorBox box_heights ' + str(box_heights))
# --------------------------------- #
# 每一个特征层对应的步长
# 每个特征层分成[layer_width,layer_height]大小,
# 每个分成[layer_width,layer_height]之后的点对应[300, 300]上的长度
# 比如[3, 3],每层步长step_x = 300 / 3 = 100,分成[3, 3]之后的点对应[300, 300]就是100个点
# --------------------------------- #
step_x = img_width / layer_width
step_y = img_height / layer_height
# print('AnchorBox layer_width ' + str(layer_width))
# print('AnchorBox layer_height ' + str(layer_height))
# print('AnchorBox step_x ' + str(step_x))
# print('AnchorBox step_y ' + str(step_y))
# --------------------------------- #
# 生成网格中心
# 在每个特征层上,从最左往右生成所有的网格中心点
# linx, liny 数量对应于 layer_width,layer_height [3, 3]
# --------------------------------- #
linx = np.linspace(0.5 * step_x, img_width - 0.5 * step_x, layer_width) #[ 50. 150. 250.]
liny = np.linspace(0.5 * step_y, img_height - 0.5 * step_y, layer_height) #[ 50. 150. 250.]
# print('AnchorBox linx ' + str(linx))
# print('AnchorBox liny ' + str(liny))
#将(x,y)方向上的序列转化成坐标形式,变成一个(layer_width×layer_height)大小的矩阵
centers_x, centers_y = np.meshgrid(linx, liny) # 生成正方形的矩阵,,,长宽一样 变成3×3矩阵
# print('AnchorBox centers_x ' + str(centers_x))
centers_x = centers_x.reshape(-1, 1) # 将3×3矩阵压缩成一维的矩阵 9行,1列
centers_y = centers_y.reshape(-1, 1)
# print('AnchorBox centers_x ' + str(centers_x))
# print('AnchorBox centers_y ' + str(centers_y))
# 每一个先验框需要两个(centers_x, centers_y),前一个用来计算左上角,后一个计算右下角
num_anchors_ = len(self.aspect_ratios) # 4
# print('AnchorBox num_anchors_ ' + str(num_anchors_))
anchor_boxes = np.concatenate((centers_x, centers_y), axis=1) # 将矩阵拼接起来,得到9个网格的中心点坐标,坐标(0, 0)是(50, 50),9行,每行一个坐标 一共9 × 2个数据,2个坐标
# print('AnchorBox anchor_boxes ' + str(anchor_boxes))
anchor_boxes = np.tile(anchor_boxes, (1, 2 * num_anchors_)) # 变成9行,16列(num_anchors_ * 4 = 16),将每行的坐标,重复8次
# print('AnchorBox anchor_boxes ' + str(len(anchor_boxes)))
# print('AnchorBox anchor_boxes ' + str(anchor_boxes))
# 获得先验框的左上角和右下角
anchor_boxes[:, ::4] -= box_widths # 将每行的数据,从第一个开始,每隔4个,将其值减去box_widths,因为box_widths有四个元素,所以相当去anchor_boxes中的4个元素减去box_widths对应的元素
anchor_boxes[:, 1::4] -= box_heights
anchor_boxes[:, 2::4] += box_widths # 将每行的数据,从第一个开始,每隔4个,将其值加上box_widths
anchor_boxes[:, 3::4] += box_heights
# 这里anchor_boxes变成了9行,每行16个元素
# print('AnchorBox anchor_boxes ' + str(len(anchor_boxes)))
# print('AnchorBox anchor_boxes ' + str(anchor_boxes))
# --------------------------------- #
# 将先验框变成小数的形式
# 归一化
# --------------------------------- #
anchor_boxes[:, ::2] /= img_width
anchor_boxes[:, 1::2] /= img_height
anchor_boxes = anchor_boxes.reshape(-1, 4) # 分成4列,行自动计算,这里行为36,每一行对应一个锚点框参数,这里默认锚点框 def anchor boxes为4
# print('AnchorBox anchor_boxes ' + str(len(anchor_boxes)))
# print('AnchorBox anchor_boxes ' + str(anchor_boxes))
anchor_boxes = np.minimum(np.maximum(anchor_boxes, 0.0), 1.0) # 这里去掉anchor_boxes中的负值
# print('AnchorBox anchor_boxes ' + str(len(anchor_boxes)))
# print('AnchorBox anchor_boxes ' + str(anchor_boxes))
return anchor_boxes
#---------------------------------------------------#
# 用于计算共享特征层的大小
# 当(height, width) = (300, 300)是,输出的为[150, 75, 38, 19, 10, 5, 3, 1]
# 后面的[38, 19, 10, 5, 3, 1]是六个有效特征层对应的分辨率
# [38, 38, 512], [19, 19, 1024], [10, 10, 512],
# [ 5, 5, 256], [ 3, 3, 256], [ 1, 1, 256]
#---------------------------------------------------#
def get_img_output_length(height, width):
filter_sizes = [3, 3, 3, 3, 3, 3, 3, 3]
padding = [1, 1, 1, 1, 1, 1, 0, 0]
stride = [2, 2, 2, 2, 2, 2, 1, 1]
feature_heights = []
feature_widths = []
# print('get_img_output_length height ' + str(height))
# print('get_img_output_length width ' + str(width))
# print('get_img_output_length filter_sizes ' + str(len(filter_sizes)))
for i in range(len(filter_sizes)):
height = (height + 2 * padding[i] - filter_sizes[i]) // stride[i] + 1
width = (width + 2 * padding[i] - filter_sizes[i]) // stride[i] + 1
# print(str(i) + ' height ' + str(height) + ' width ' + str(width))
feature_heights.append(height)
feature_widths.append(width)
return np.array(feature_heights)[-6:], np.array(feature_widths)[-6:]
# 获取所有的anchor框,在六层有效层上获取,
def get_anchors(input_shape = [300,300], anchors_size = [30, 60, 111, 162, 213, 264, 315]):
feature_heights, feature_widths = get_img_output_length(input_shape[0], input_shape[1]) # w,h = (300,300)
aspect_ratios = [[1, 2], [1, 2, 3], [1, 2, 3], [1, 2, 3], [1, 2], [1, 2]]
anchors = []
# print('get_anchors feature_heights ' + str(feature_heights))
# print('get_anchors feature_heights ' + str(feature_heights))
for i in range(len(feature_heights)):
# 计算每层有效特征层的锚点框 分别对应
# 38*38*4 19*19*6 10*10*6 5*5*6 3*3*4 1*1*4
# 5576 2166 600 150 36 4
anchors.append(AnchorBox(input_shape, anchors_size[i], max_size = anchors_size[i+1],
aspect_ratios = aspect_ratios[i]).call([feature_heights[i], feature_widths[i]]))
# print('get_anchors anchors ' + str(len(anchors)))
anchors = np.concatenate(anchors, axis=0)
return anchors前面谈到的编码、解码部分。
# 获取真实框
class BBoxUtility(object):
def __init__(self, num_classes, nms_thresh=0.45, top_k=300):
self.num_classes = num_classes
self._nms_thresh = nms_thresh
self._top_k = top_k
def ssd_correct_boxes(self, box_xy, box_wh, input_shape, image_shape, letterbox_image):
# -----------------------------------------------------------------#
# 把y轴放前面是因为方便预测框和图像的宽高进行相乘
# -----------------------------------------------------------------#
box_yx = box_xy[..., ::-1]
box_hw = box_wh[..., ::-1]
input_shape = np.array(input_shape)
image_shape = np.array(image_shape)
if letterbox_image:
# -----------------------------------------------------------------#
# 这里求出来的offset是图像有效区域相对于图像左上角的偏移情况
# new_shape指的是宽高缩放情况
# -----------------------------------------------------------------#
new_shape = np.round(image_shape * np.min(input_shape / image_shape))
offset = (input_shape - new_shape) / 2. / input_shape
scale = input_shape / new_shape
box_yx = (box_yx - offset) * scale
box_hw *= scale
box_mins = box_yx - (box_hw / 2.)
box_maxes = box_yx + (box_hw / 2.)
boxes = np.concatenate([box_mins[..., 0:1], box_mins[..., 1:2], box_maxes[..., 0:1], box_maxes[..., 1:2]],
axis=-1)
boxes *= np.concatenate([image_shape, image_shape], axis=-1)
return boxes
# 对回归结果进行处理,得到真实框的位置信息
# 针对一张图片进行解码预测结果
# mbox_loc 8732个预测框所对应目标的坐标信息,一个物体有四个数据表示(x, y, w, h)
# anchors所有的锚点框 8732个
def decode_boxes(self, mbox_loc, anchors, variances=[0.1, 0.1, 0.2, 0.2]):
# 获得先验框的宽与高
# 每个锚点框有四个数据,四条边分别与左上点的距离
# print('decode_boxes mbox_loc ' + str(len(mbox_loc[0])))
anchor_width = anchors[:, 2] - anchors[:, 0] # 每个锚点框对应的w,h
anchor_height = anchors[:, 3] - anchors[:, 1]
# print('decode_boxes anchors ' + str(len(anchors)))
# print('decode_boxes anchors ' + str(len(anchors[0])))
# print('decode_boxes anchor_width ' + str(len(anchor_width)))
# print('decode_boxes anchor_height ' + str(len(anchor_height)))
# print('decode_boxes anchor_width ' + str(anchor_width))
# 获得每个先验框的中心点
anchor_center_x = 0.5 * (anchors[:, 2] + anchors[:, 0])
anchor_center_y = 0.5 * (anchors[:, 3] + anchors[:, 1])
# 真实框距离先验框中心的xy轴偏移情况
#decode_bbox_center_x = mbox_loc[:, 0] * anchor_width * variances[0]
# decode_bbox_center_x = anchor_center_x + mbox_loc[:, 0] * anchor_width * variances[0]
# decode_bbox_center_x += anchor_center_x
# decode_bbox_center_y = mbox_loc[:, 1] * anchor_height * variances[1]
# decode_bbox_center_y += anchor_center_y
# 对应的预测框和先验框进行融合
# 每个先验框的距离是固定的,预测框是经过模型运算的,两者相乘表示真实框相对于先验框的距离,
decode_bbox_center_x = anchor_center_x + mbox_loc[:, 0] * anchor_width * variances[0]
decode_bbox_center_y = anchor_center_y + mbox_loc[:, 1] * anchor_height * variances[1]
# print('decode_boxes decode_bbox_center_x ' + str(len(decode_bbox_center_x)))
# print('decode_boxes decode_bbox_center_y ' + str(len(decode_bbox_center_y)))
# 真实框的宽与高的求取
decode_bbox_width = np.exp(mbox_loc[:, 2] * variances[2]) # 不知道为啥要用自然数e作为底数进行运算
decode_bbox_width *= anchor_width
decode_bbox_height = np.exp(mbox_loc[:, 3] * variances[3])
decode_bbox_height *= anchor_height
# 获取真实框的左上角与右下角
decode_bbox_xmin = decode_bbox_center_x - 0.5 * decode_bbox_width
decode_bbox_ymin = decode_bbox_center_y - 0.5 * decode_bbox_height
decode_bbox_xmax = decode_bbox_center_x + 0.5 * decode_bbox_width
decode_bbox_ymax = decode_bbox_center_y + 0.5 * decode_bbox_height
# 真实框的左上角与右下角进行堆叠
# 所有得到结果的左上角与右下角数据进行合并
decode_bbox = np.concatenate((decode_bbox_xmin[:, None],
decode_bbox_ymin[:, None],
decode_bbox_xmax[:, None],
decode_bbox_ymax[:, None]), axis=-1)
# 防止超出0与1
decode_bbox = np.minimum(np.maximum(decode_bbox, 0.0), 1.0)
return decode_bbox
# 解码ssd模型得到的预测结果
# anchors所有的锚点框
# image_shape 输入图像尺寸 不确定,可以为如1330×1330
# input_shape是SSD算法模型输入尺寸,固定为300×300
def decode_box(self, predictions, anchors, image_shape, input_shape, letterbox_image,
variances=[0.1, 0.1, 0.2, 0.2], confidence=0.5):
# print('decode_box anchors ' + str(len(anchors)))
# print('decode_box image_shape ' + str(image_shape))
# print('decode_box input_shape ' + str(input_shape))
# ---------------------------------------------------#
# :4是回归预测结果
# ---------------------------------------------------#
mbox_loc = predictions[:, :, :4] # 取得所有预测框的坐标信息,一共8732
# print('decode_box mbox_loc ' + str(len(mbox_loc[0])))
# print('decode_box mbox_loc ' + str(mbox_loc))
# ---------------------------------------------------#
# 获得种类的置信度
# ---------------------------------------------------#
mbox_conf = predictions[:, :, 4:] #获得所有预测框的置信度,一共8732
# print('decode_box mbox_conf ' + str(len(mbox_conf[0])))
# print('decode_box mbox_conf ' + str(mbox_conf))
results = []
# ----------------------------------------------------------------------------------------------------------------#
# 对每一张图片进行处理,由于在predict.py的时候,我们只输入一张图片,所以for i in range(len(mbox_loc))只进行一次
# ----------------------------------------------------------------------------------------------------------------#
for i in range(len(mbox_loc)):
results.append([])
# --------------------------------#
# 利用回归结果对先验框进行解码
# --------------------------------#
decode_bbox = self.decode_boxes(mbox_loc[i], anchors, variances) # 得到所有的真是狂信息,一共四个数据,左上角和右下角
# print('decode_box decode_bbox ' + str(len(decode_bbox)))
# print('decode_box decode_bbox ' + str(len(decode_bbox[0])))
# 处理所有的真实框
for c in range(1, self.num_classes):
# --------------------------------#
# 取出属于该类的所有框的置信度
# 判断是否大于门限
# --------------------------------#
c_confs = mbox_conf[i, :, c] # 获取某个类别所有预测框的置信度
c_confs_m = c_confs > confidence # 置信度大于一定值
# print('decode_box c_confs_m ' + ' ' + str(c) + ' ' + str(len(c_confs[c_confs_m])))
# len(c_confs[c_confs_m]) 就是某个类别所有置信度大于confidence的数量
# c_confs[c_confs_m]就是对应的大于confidence预测框
if len(c_confs[c_confs_m]) > 0: #
# -----------------------------------------#
# 取出得分高于confidence的框
# -----------------------------------------#
# boxes_to_process,confs_to_process的元素数量等于len(c_confs[c_confs_m])
# 这里得到置信度大于confidence的预测框的物体信息
boxes_to_process = decode_bbox[c_confs_m] # 解码预测框对应的物体信息
confs_to_process = c_confs[c_confs_m] # 大于confidence的所有预测框的集合
# print('decode_box boxes_to_process ' + str(len(boxes_to_process)))
# print('decode_box boxes_to_process ' + str(len(confs_to_process)))
# -----------------------------------------#
# 进行iou的非极大抑制,某些预测框可能重复在某个物体上面,重复的只保留物体对应一个最大的预测框
# idx的数量就是某个种类物体最终被检测出来多少个
# -----------------------------------------#
idx = tf.image.non_max_suppression(tf.cast(boxes_to_process, tf.float32),
tf.cast(confs_to_process, tf.float32),
self._top_k,
iou_threshold=self._nms_thresh).numpy()
# print('decode_box idx ' + str(idx))
# -----------------------------------------#
# 取出在非极大抑制中效果较好的内容
# 每个被检测的物体有一个对应的位置信息和置信度
# good_boxes 保存某个种类的所有被检测出出来的物体的位置信息,confs保存对应的置信度,这两个的列表的长度一样
# -----------------------------------------#
good_boxes = boxes_to_process[idx]
confs = confs_to_process[idx][:, None]
# [:, None]的用法是将横着的列表转化为竖着的列表,,,
# 如[0.9922133 0.9003193 0.81056666]转化为 [[0.9922133 ]
# [0.9003193 ]
# [0.81056666]]
# print('decode_box good_boxes ' + str(good_boxes))
# print('decode_box confs ' + str(confs))
# print('decode_box confs ' + str(confs_to_process[idx]))
labels = (c - 1) * np.ones((len(idx), 1)) # np.ones生成一个len(idx) × 1矩阵,元素均为1
# -----------------------------------------#
# 将框的位置、label、置信度进行堆叠。
# -----------------------------------------#
c_pred = np.concatenate((good_boxes, labels, confs), axis=1)
# print('decode_box c_pred ' + str(c_pred))
# 添加进result里
results[-1].extend(c_pred)
if len(results[-1]) > 0:
results[-1] = np.array(results[-1])
box_xy, box_wh = (results[-1][:, 0:2] + results[-1][:, 2:4]) / 2, results[-1][:, 2:4] - results[-1][:,
0:2]
results[-1][:, :4] = self.ssd_correct_boxes(box_xy, box_wh, input_shape, image_shape, letterbox_image)
return results
个人认为SSD算法的核心部分代码大概这么多,剩下的比较好写了。GitHub链接暂时不放了,有些还没做好,等全部写好了再开源。
三、测试
SSD模型以及训练好,只用的是自制的数据集,标注软件是labelImg
终端输出结果![]()
图像输出,在图中标注了物体。
四、总结
SSD算法速度和经度都还可以。算法简单的说就是,对一张[300,300]的图像,在上面分布一共8732个先验框,每个先验框负责识别一个区域,将结果进行回归,得到最终结果。