《GhostNet: More Features from Cheap Operations》论文解读
一、提出背景
因为嵌入式设备有限的内存和计算资源,在其上部署神经网络很困难,所以要降低神经网络的大小和计算资源的占用。常见的方法有模型剪枝(pruning),量化(quantization)和蒸馏(distillation)。
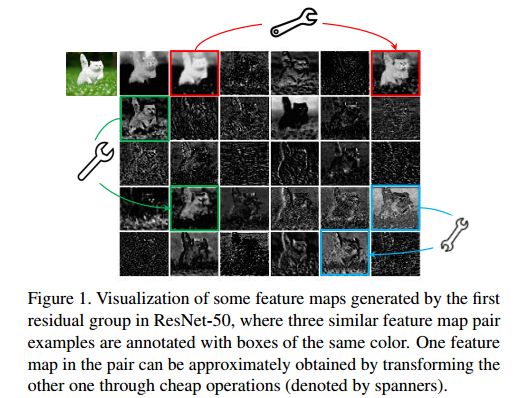
常规的CNN网络提取到的特征图有很多冗余信息,如下图,扳手连接的两个位置的特征图类似。
二、算法原理
1.Ghost module
常规的卷积公式:![]() ,其中
,其中  是卷积操作,
是卷积操作,![]() 是输出的特征图,h‘是输出的高,w’是输出的宽,n是输出维度,即卷积核的数量。
是输出的特征图,h‘是输出的高,w’是输出的宽,n是输出维度,即卷积核的数量。![]() 是卷积核,c是通道数,k是卷积核的高和宽,n是输出维度。
是卷积核,c是通道数,k是卷积核的高和宽,n是输出维度。
整个卷积操作的FLOPs是:![]() ,n和c往往很大。
,n和c往往很大。

普通的conv操作如上图a,Ghost module对此进行了改进,第一步是使用更少的卷积核生成输出特征图,如原本的个数是n,现在的个数是m。第二步是对第一步生成的每一张特征图进行cheap operations(depthwise卷积),每张特征图生成s张新特征图(包括一张恒等变换),总共是m×s张,并保证m×s=n,这样保证Ghost module和普通conv输出的特征形状相同。第三步是将这些特征图拼接到一起。
Ghost module的初始卷积公式:![]() ,省略了b。其中
,省略了b。其中![]() ,m是初始卷积中卷积核的数量,
,m是初始卷积中卷积核的数量,![]() ,其余的超参数如卷积核尺寸,步长,padding都是和普通conv一致。
,其余的超参数如卷积核尺寸,步长,padding都是和普通conv一致。
复杂度分析:

(4)式计算的是加速比,分子是普通conv的FLOPS,分母是Ghost module的FLOPS,其中左边是初始卷积的FLOPS,右边是cheap operations的FLOPS。因为分子分母都有相同的因子n*h'*w',所以可以约掉,又因为d  k,所以将k * k约掉,又因为s << c,最终得到s。
k,所以将k * k约掉,又因为s << c,最终得到s。
(5)式计算的是压缩比,分子是普通conv卷积核的大小,分母是Ghost module的大小,其中左边是初始卷积卷积核的大小,右边是cheap operations的大小,最终也是得到s。
代码分析:
class GhostModule(nn.Module):
def __init__(self, inp, oup, kernel_size=1, ratio=2, dw_size=3, stride=1, relu=True):
super(GhostModule, self).__init__()
self.oup = oup
init_channels = math.ceil(oup / ratio)
new_channels = init_channels*(ratio-1)
self.primary_conv = nn.Sequential(
nn.Conv2d(inp, init_channels, kernel_size, stride, kernel_size//2, bias=False),
nn.BatchNorm2d(init_channels),
nn.ReLU(inplace=True) if relu else nn.Sequential(),
)
self.cheap_operation = nn.Sequential(
nn.Conv2d(init_channels, new_channels, dw_size, 1, dw_size//2, groups=init_channels, bias=False),
nn.BatchNorm2d(new_channels),
nn.ReLU(inplace=True) if relu else nn.Sequential(),
)
def forward(self, x):
x1 = self.primary_conv(x)
x2 = self.cheap_operation(x1)
out = torch.cat([x1,x2], dim=1)
return out[:,:self.oup,:,:]
2.Ghost Bottlenecks

Ghost Bottleneck主要由两个Ghost module堆叠而成,第一个Ghost module用于增加通道数,第二个Ghost module用于减少通道数,然后shortcut用于连接两个Ghost module的输入和输出。每一个Ghost module后都会接一个BN和Relu操作,但是受MobileNetV2的启发,第二个Ghost module后没有Relu。当stride=2时,会在两个Ghost module之间插入一个降采样层和一个步长为2的depthwise convolution操作。
代码分析:
def depthwise_conv(inp, oup, kernel_size=3, stride=1, relu=False):
return nn.Sequential(
nn.Conv2d(inp, oup, kernel_size, stride, kernel_size//2, groups=inp, bias=False),
nn.BatchNorm2d(oup),
nn.ReLU(inplace=True) if relu else nn.Sequential(),
)
class SELayer(nn.Module):
def __init__(self, channel, reduction=4):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel), )
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
y = torch.clamp(y, 0, 1)
return x * y
class GhostBottleneck(nn.Module):
def __init__(self, inp, hidden_dim, oup, kernel_size, stride, use_se):
super(GhostBottleneck, self).__init__()
assert stride in [1, 2]
self.conv = nn.Sequential(
# pw
GhostModule(inp, hidden_dim, kernel_size=1, relu=True),
# dw
depthwise_conv(hidden_dim, hidden_dim, kernel_size, stride, relu=False) if stride==2 else nn.Sequential(),
# Squeeze-and-Excite
SELayer(hidden_dim) if use_se else nn.Sequential(),
# pw-linear
GhostModule(hidden_dim, oup, kernel_size=1, relu=False),
)
if stride == 1 and inp == oup:
self.shortcut = nn.Sequential()
else:
self.shortcut = nn.Sequential(
depthwise_conv(inp, inp, 3, stride, relu=True),
nn.Conv2d(inp, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
def forward(self, x):
return self.conv(x) + self.shortcut(x)
3.GhostNet

上面的网络结构是仿照MobileNetV3搭建的,只是一种可能的搭建方法。
代码分析:
class GhostNet(nn.Module):
def __init__(self, cfgs, num_classes=1000, width_mult=1.):
super(GhostNet, self).__init__()
# setting of inverted residual blocks
self.cfgs = cfgs
# building first layer
output_channel = _make_divisible(16 * width_mult, 4)
layers = [nn.Sequential(
nn.Conv2d(3, output_channel, 3, 2, 1, bias=False),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True)
)]
input_channel = output_channel
# building inverted residual blocks
block = GhostBottleneck
for k, exp_size, c, use_se, s in self.cfgs:
output_channel = _make_divisible(c * width_mult, 4)
hidden_channel = _make_divisible(exp_size * width_mult, 4)
layers.append(block(input_channel, hidden_channel, output_channel, k, s, use_se))
input_channel = output_channel
self.features = nn.Sequential(*layers)
# building last several layers
output_channel = _make_divisible(exp_size * width_mult, 4)
self.squeeze = nn.Sequential(
nn.Conv2d(input_channel, output_channel, 1, 1, 0, bias=False),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True),
nn.AdaptiveAvgPool2d((1, 1)),
)
input_channel = output_channel
output_channel = 1280
self.classifier = nn.Sequential(
nn.Linear(input_channel, output_channel, bias=False),
nn.BatchNorm1d(output_channel),
nn.ReLU(inplace=True),
nn.Dropout(0.2),
nn.Linear(output_channel, num_classes),
)
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = self.squeeze(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def ghost_net(**kwargs):
"""
Constructs a MobileNetV3-Large model
"""
cfgs = [
# k, t, c, SE, s
[3, 16, 16, 0, 1],
[3, 48, 24, 0, 2],
[3, 72, 24, 0, 1],
[5, 72, 40, 1, 2],
[5, 120, 40, 1, 1],
[3, 240, 80, 0, 2],
[3, 200, 80, 0, 1],
[3, 184, 80, 0, 1],
[3, 184, 80, 0, 1],
[3, 480, 112, 1, 1],
[3, 672, 112, 1, 1],
[5, 672, 160, 1, 2],
[5, 960, 160, 0, 1],
[5, 960, 160, 1, 1],
[5, 960, 160, 0, 1],
[5, 960, 160, 1, 1]
]
return GhostNet(cfgs, **kwargs)
if __name__=='__main__':
model = ghost_net()
model.eval()
print(model)
input = torch.randn(32,3,224,224)
y = model(input)
print(y)三、实验结果
1.特征提取
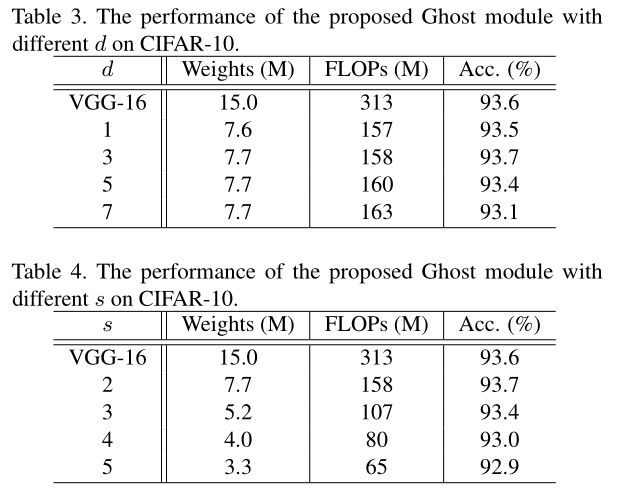
表3是s=2的情况下,不同d和VGG-16的对比,可以看出当d=3时表现最好,这是因为d=1并不能很好的提取到空间信息,d>3会引入过拟合和过多的计算量。
表4是d=3的情况下,不同s和VGG-16的对比,s是直接和计算量相关的参数,因此s越大,计算量越小,压缩比例越大,同时准确率也会下降。当s=2时,模型大小和计算量只有VGG-16的一半了,甚至准确率比它还高,所以选择s=2。
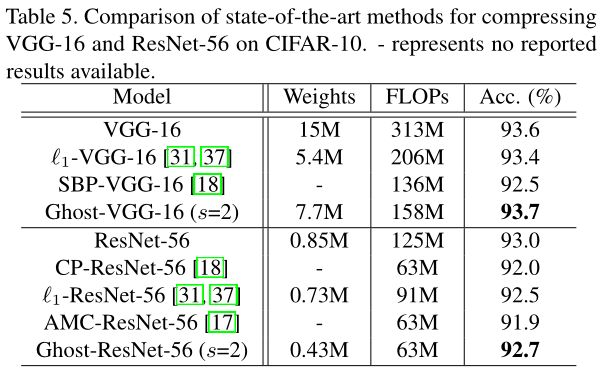
表5中Ghost-VGG-16和Ghost-ResNet-56分别是将VGG-16和ResNet-56中所有的conv操作替换成Ghost module得到的网络,可以看出这两个网络都实现了2x的加速,并且准确率上基本没有损失。

图4和图5同样还是在说明VGG-16提取到的特征图有很多信息冗余,但是Ghost-VGG-16没有,并且提取到的特征图信息与VGG-16差别不大。

表6是GhostNet在ImageNet上测试得到的结果,同样是实现了2x的加速,并且准确率上基本没有损失。
2.图像分类

3.目标检测
