NNDL 实验三 线性回归
2.2 线性回归
2.2.1 数据集构建
构造一个小的回归数据集:
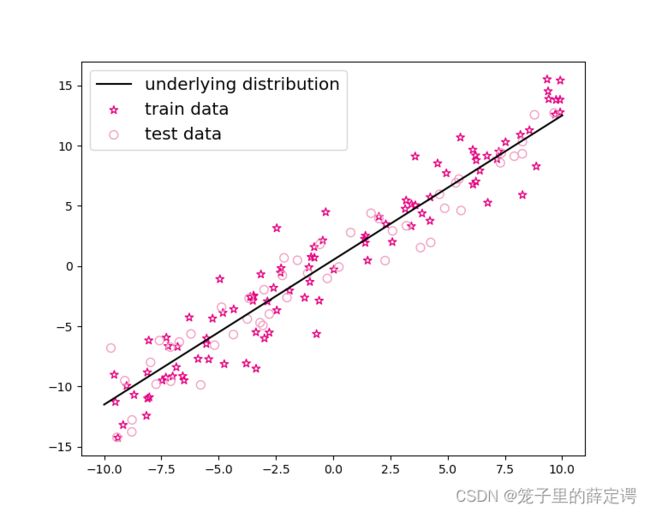
生成 150 个带噪音的样本,其中 100 个训练样本,50 个测试样本,并打印出训练数据的可视化分布。
def create_toy_data(func, interval, sample_num, noise = 0.0, add_outlier = False, outlier_ratio = 0.001):
# 均匀采样
# 使用torch.rand在生成sample_num个随机数
X = torch.rand(size = [sample_num]) * (interval[1]-interval[0]) + interval[0]
y = func(X)
# 生成高斯分布的标签噪声
# 使用torch.normal生成0均值,noise标准差的数据
epsilon = torch.tensor(np.random.normal(0,noise,size=y.shape[0]))
y = y + epsilon
if add_outlier: # 生成额外的异常点
outlier_num = int(len(y)*outlier_ratio)
if outlier_num != 0:
# 使用torch.randint生成服从均匀分布的、范围在[0, len(y))的随机Tensor
outlier_idx = torch.rand(len(y),shape = [outlier_num])
y[outlier_idx] = y[outlier_idx] * 5
return X, y
func = linear_func
interval = (-10,10)
train_num = 100 # 训练样本数目
test_num = 50 # 测试样本数目
noise = 2
X_train, y_train = create_toy_data(func=func, interval=interval, sample_num=train_num, noise = noise, add_outlier = False)
X_test, y_test = create_toy_data(func=func, interval=interval, sample_num=test_num, noise = noise, add_outlier = False)
X_train_large, y_train_large = create_toy_data(func=func, interval=interval, sample_num=5000, noise = noise, add_outlier = False)
# torch.linspace返回一个Tensor,Tensor的值为在区间start和stop上均匀间隔的num个值,输出Tensor的长度为num
X_underlying = torch.linspace(interval[0],interval[1],train_num)
y_underlying = linear_func(X_underlying)
# 绘制数据
plt.scatter(X_train, y_train, marker='*', facecolor="none", edgecolor='#e4007f', s=50, label="train data")
plt.scatter(X_test, y_test, facecolor="none", edgecolor='#f19ec2', s=50, label="test data")
plt.plot(X_underlying, y_underlying, c='#000000', label=r"underlying distribution")
plt.legend(fontsize='x-large') # 给图像加图例
plt.savefig('ml-vis.pdf') # 保存图像到PDF文件中
plt.show()
运行结果
2.2.2 模型构建

def linear_func(x,w=1.2,b=0.5):
y = w*x + b
return y
自定义线性算子Op.py
import torch
torch.seed() # 设置随机种子
class Op(object):
def __init__(self):
pass
def __call__(self, inputs):
return self.forward(inputs)
def forward(self, inputs):
raise NotImplementedError
def backward(self, inputs):
raise NotImplementedError
# 线性算子
class Linear(Op):
def __init__(self, input_size):
"""
输入:
- input_size:模型要处理的数据特征向量长度
"""
self.input_size = input_size
# 模型参数
self.params = {}
self.params['w'] = torch.randn(self.input_size, 1)
self.params['b'] = torch.zeros([1])
def __call__(self, X):
return self.forward(X)
# 前向函数
def forward(self, X):
N, D = X.shape
if self.input_size == 0:
return torch.full([N, 1], fill_value=self.params['b'])
assert D == self.input_size # 输入数据维度合法性验证
# 使用torch.matmul计算两个tensor的乘积
y_pred = torch.matmul(X, self.params['w']) + self.params['b']
return y_pred
# 注意这里我们为了和后面章节统一,这里的X矩阵是由N个x向量的转置拼接成的,与原教材行向量表示方式不一致
input_size = 3
N = 2
X = torch.randn(N,input_size) # 生成2个维度为3的数据
model = Linear(input_size)
y_pred = model(X)
print("y_pred:", y_pred) # 输出结果的个数也是2个
运行结果

2.2.3 损失函数
回归任务中常用的评估指标是均方误差
均方误差(mean-square error, MSE)是反映估计量与被估计量之间差异程度的一种度量。

def mean_squared_error(y_true, y_pred):
assert y_true.shape[0] == y_pred.shape[0]
# torch.square计算输入的平方值
# torch.mean沿 axis 计算 x 的平均值,默认axis是None,则对输入的全部元素计算平均值。
error = torch.mean(torch.square(y_true - y_pred))
return error
# 构造一个简单的样例进行测试:[N,1], N=2
y_true = torch.as_tensor([[-0.2], [4.9]], dtype=torch.float32)
y_pred = torch.as_tensor([[1.3], [2.5]], dtype=torch.float32)
error = mean_squared_error(y_true=y_true, y_pred=y_pred).item()
print("error:", error)
运行结果

注意:代码实现中没有除2
思考:没有除2合理么?
跑了一下除以2和未除以2的MSE函数,没啥大区别(因为没涉及到反向传播)

我觉得除以2是一个微积分技巧,用于消除计算平方项偏导数时出现的2,但是不加2也是
合理的,加上速度更快一些。
2.2.4 模型优化
经验风险 ( Empirical Risk ),即在训练集上的平均损失。

def optimizer_lsm(model, X, y, reg_lambda=0):
N, D = X.shape
# 对输入特征数据所有特征向量求平均
x_bar_tran = torch.mean(X, axis=0).T
# 求标签的均值,shape=[1]
y_bar = torch.mean(y)
# torch.subtract通过广播的方式实现矩阵减向量
x_sub = torch.subtract(X, x_bar_tran)
# 使用torch.all判断输入tensor是否全0
if torch.all(x_sub == 0):
model.params['b'] = y_bar
model.params['w'] = torch.zeros([D])
return model
# torch.inverse求方阵的逆
tmp = torch.inverse(torch.matmul(x_sub.T, x_sub) +
reg_lambda * torch.eye(D))
w = torch.matmul(torch.matmul(tmp, x_sub.T), (y - y_bar))
b = y_bar - torch.matmul(x_bar_tran, w)
model.params['b'] = b
model.params['w'] = torch.squeeze(w, axis=-1)
return model
思考1. 为什么省略了![]() 不影响效果?
不影响效果?
1/N是一个常数, 在反向传播求偏导时 ,对于相同的超参数只会影响收敛速度,并不会影响最终收敛的结果
思考 2. 什么是最小二乘法 ( Least Square Method , LSM )
最小二乘法(又称最小平方法)是一种数学优化技术。它通过最小化误差的平方和寻找数据的最佳函数匹配 (这时候就要祭出圣经了)。
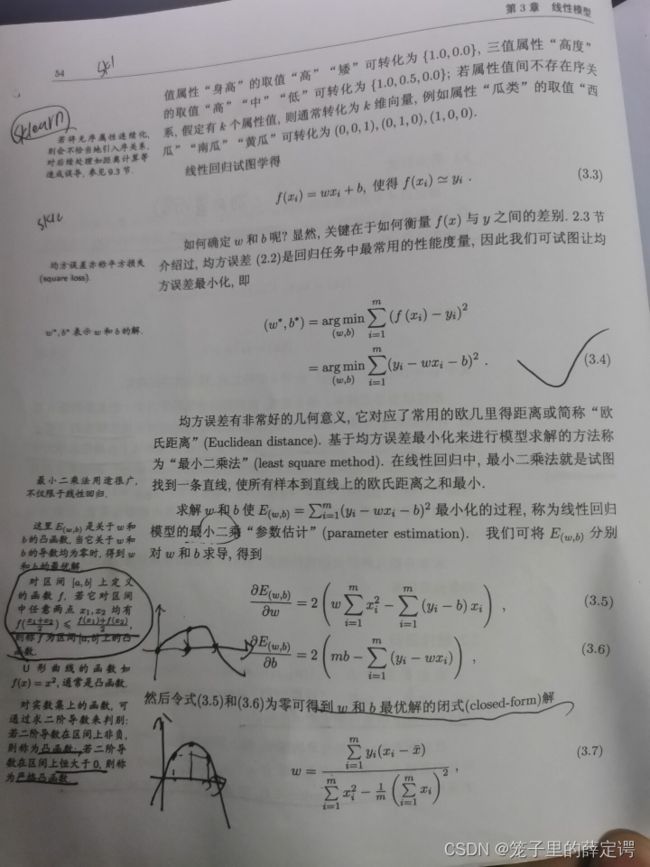 我最早彻底理解最小二乘法就是参考的这一节,讲解的可以说是非常细致了
我最早彻底理解最小二乘法就是参考的这一节,讲解的可以说是非常细致了
2.2.5 模型训练
在准备了数据、模型、损失函数和参数学习的实现之后,开始模型的训练。
在回归任务中,模型的评价指标和损失函数一致,都为均方误差。
通过上文实现的线性回归类来拟合训练数据,并输出模型在训练集上的损失。
input_size = 1
model = Linear(input_size)
model = optimizer_lsm(model,X_train.reshape([-1,1]),y_train.reshape([-1,1]))
print("w_pred:",model.params['w'].item(), "b_pred: ", model.params['b'].item())
y_train_pred = model(X_train.reshape([-1,1])).squeeze()
train_error = mean_squared_error(y_true=y_train, y_pred=y_train_pred).item()
print("train error: ",train_error)
运行结果

2.2.6 模型评估
用训练好的模型预测一下测试集的标签,并计算在测试集上的损失。
y_test_pred = model(X_test.reshape([-1,1])).squeeze()
test_error = mean_squared_error(y_true=y_test, y_pred=y_test_pred).item()
print("test error: ",test_error)
运行结果

2.2.7 样本数量 & 正则化系数
(1) 调整训练数据的样本数量,由 100 调整到 5000,观察对模型性能的影响。

 可以看出样本数量加大以后,预测出的W和B明显更接近于真实值
可以看出样本数量加大以后,预测出的W和B明显更接近于真实值
(2) 调整正则化系数,观察对模型性能的影响。
从0调整至0.1
 从0.1调整至1
从0.1调整至1

 由上图可以看出,微调正则项系数还是可以提升性能的,但是调节幅度过大,会适得其反,使得性能下降。最早体会到这一点,还是在训练YOLO时候,git clone过来模型经过多个epoch后,loss全部变为NAN值,苦恼了好久,最终还是询问大佬得知自己的超参数设置的太大,需要调小2~3个级数。
由上图可以看出,微调正则项系数还是可以提升性能的,但是调节幅度过大,会适得其反,使得性能下降。最早体会到这一点,还是在训练YOLO时候,git clone过来模型经过多个epoch后,loss全部变为NAN值,苦恼了好久,最终还是询问大佬得知自己的超参数设置的太大,需要调小2~3个级数。
2.3 多项式回归

2.3.1 数据集构建
import math
import torch
import matplotlib.pyplot as plt
import numpy as np
# sin函数: sin(2 * pi * x)
def sin(x):
y =torch.sin(2 * math.pi * x)
return y
def create_toy_data(func, interval, sample_num, noise = 0.0, add_outlier = False, outlier_ratio = 0.001):
# 均匀采样
# 使用torch.rand在生成sample_num个随机数
X = torch.rand(size = [sample_num]) * (interval[1]-interval[0]) + interval[0]
y = func(X)
# 生成高斯分布的标签噪声
# 使用torch.normal生成0均值,noise标准差的数据
epsilon = torch.tensor(np.random.normal(0,noise,size=y.shape[0]))
y = y + epsilon
if add_outlier: # 生成额外的异常点
outlier_num = int(len(y)*outlier_ratio)
if outlier_num != 0:
# 使用torch.randint生成服从均匀分布的、范围在[0, len(y))的随机Tensor
outlier_idx = torch.rand(len(y),shape = [outlier_num])
y[outlier_idx] = y[outlier_idx] * 5
return X, y
func = sin
interval = (0,1)
train_num = 15
test_num = 10
noise = 0.5 #0.1
X_train, y_train = create_toy_data(func=func, interval=interval, sample_num=train_num, noise = noise)
X_test, y_test = create_toy_data(func=func, interval=interval, sample_num=test_num, noise = noise)
X_underlying = torch.linspace(interval[0],interval[1],steps=100)
y_underlying = sin(X_underlying)
# 绘制图像
plt.rcParams['figure.figsize'] = (8.0, 6.0)
plt.scatter(X_train, y_train, facecolor="none", edgecolor='#e4007f', s=50, label="train data")
#plt.scatter(X_test, y_test, facecolor="none", edgecolor="r", s=50, label="test data")
plt.plot(X_underlying, y_underlying, c='#000000', label=r"$\sin(2\pi x)$")
plt.legend(fontsize='x-large')
plt.savefig('ml-vis2.pdf')
plt.show()

2.3.2 模型构建
套用求解线性回归参数的方法来求解多项式回归参数
# 多项式转换
def polynomial_basis_function(x, degree=2):
if degree == 0:
return torch.ones(x.shape, dtype=torch.loat32)
x_tmp = x
x_result = x_tmp
for i in range(2, degree + 1):
x_tmp = torch.multiply(x_tmp, x) # 逐元素相乘
x_result = torch.concat((x_result, x_tmp), axis=-1)
return x_result
# 简单测试
data = [[2], [3], [4]]
X = torch.as_tensor(data=data, dtype=torch.float32)
degree = 3
transformed_X = polynomial_basis_function(X, degree=degree)
print("转换前:", X)
print("阶数为", degree, "转换后:", transformed_X)
运行结果

2.3.3 模型训练
对于多项式回归,可以同样使用前面线性回归中定义的LinearRegression算子、训练函数train、均方误差函数mean_squared_error。
for i, degree in enumerate([0, 1, 3, 8]): # []中为多项式的阶数
model = Linear(degree)
X_train_transformed = polynomial_basis_function(X_train.reshape([-1, 1]), degree)
X_underlying_transformed = polynomial_basis_function(X_underlying.reshape([-1, 1]), degree)
model = optimizer_lsm(model, X_train_transformed, y_train.reshape([-1, 1])) # 拟合得到参数
y_underlying_pred = model(X_underlying_transformed).squeeze()
print(model.params)
# 绘制图像
plt.subplot(2, 2, i + 1)
plt.scatter(X_train, y_train, facecolor="none", edgecolor='#e4007f', s=50, label="train data")
plt.plot(X_underlying, y_underlying, c='#000000', label=r"$\sin(2\pi x)$")
plt.plot(X_underlying, y_underlying_pred, c='#f19ec2', label="predicted function")
plt.ylim(-2, 1.5)
plt.annotate("M={}".format(degree), xy=(0.95, -1.4))
# plt.legend(bbox_to_anchor=(1.05, 0.64), loc=2, borderaxespad=0.)
plt.legend(loc='lower left', fontsize='x-large')
plt.savefig('ml-vis3.pdf')
plt.show()
运行结果

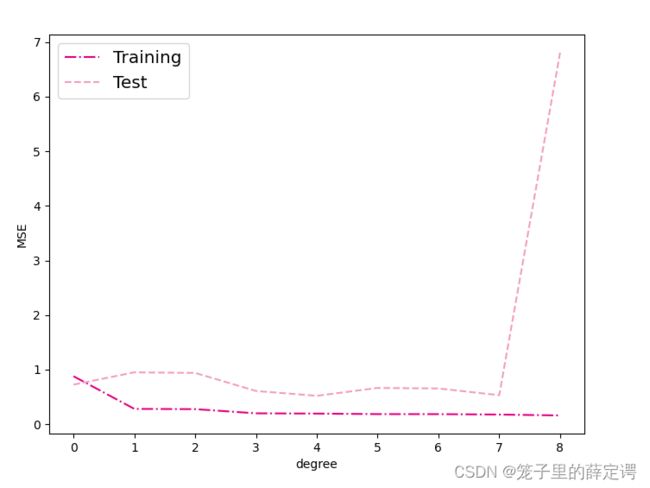
2.3.4 模型评估
# 训练误差和测试误差
training_errors = []
test_errors = []
distribution_errors = []
# 遍历多项式阶数
for i in range(9):
model = Linear(i)
X_train_transformed = polynomial_basis_function(X_train.reshape([-1, 1]), i)
X_test_transformed = polynomial_basis_function(X_test.reshape([-1, 1]), i)
X_underlying_transformed = polynomial_basis_function(X_underlying.reshape([-1, 1]), i)
optimizer_lsm(model, X_train_transformed, y_train.reshape([-1, 1]))
y_train_pred = model(X_train_transformed).squeeze()
y_test_pred = model(X_test_transformed).squeeze()
y_underlying_pred = model(X_underlying_transformed).squeeze()
train_mse = mean_squared_error(y_true=y_train, y_pred=y_train_pred).item()
training_errors.append(train_mse)
test_mse = mean_squared_error(y_true=y_test, y_pred=y_test_pred).item()
test_errors.append(test_mse)
# distribution_mse = mean_squared_error(y_true=y_underlying, y_pred=y_underlying_pred).item()
# distribution_errors.append(distribution_mse)
print("train errors: \n", training_errors)
print("test errors: \n", test_errors)
# print ("distribution errors: \n", distribution_errors)
# 绘制图片
plt.rcParams['figure.figsize'] = (8.0, 6.0)
plt.plot(training_errors, '-.', mfc="none", mec='#e4007f', ms=10, c='#e4007f', label="Training")
plt.plot(test_errors, '--', mfc="none", mec='#f19ec2', ms=10, c='#f19ec2', label="Test")
# plt.plot(distribution_errors, '-', mfc="none", mec="#3D3D3F", ms=10, c="#3D3D3F", label="Distribution")
plt.legend(fontsize='x-large')
plt.xlabel("degree")
plt.ylabel("MSE")
plt.savefig('ml-mse-error.pdf')
plt.show()
运行结果

对于模型过拟合的情况,可以引入正则化方法,通过向误差函数中添加一个惩罚项来避免系数倾向于较大的取值。下面加入l2正则化项,查看拟合结果。
degree = 8 # 多项式阶数
reg_lambda = 0.0001 # 正则化系数
X_train_transformed = polynomial_basis_function(X_train.reshape([-1,1]), degree)
X_test_transformed = polynomial_basis_function(X_test.reshape([-1,1]), degree)
X_underlying_transformed = polynomial_basis_function(X_underlying.reshape([-1,1]), degree)
model = Linear(degree)
optimizer_lsm(model,X_train_transformed,y_train.reshape([-1,1]))
y_test_pred=model(X_test_transformed).squeeze()
y_underlying_pred=model(X_underlying_transformed).squeeze()
model_reg = Linear(degree)
optimizer_lsm(model_reg,X_train_transformed,y_train.reshape([-1,1]),reg_lambda=reg_lambda)
y_test_pred_reg=model_reg(X_test_transformed).squeeze()
y_underlying_pred_reg=model_reg(X_underlying_transformed).squeeze()
mse = mean_squared_error(y_true = y_test, y_pred = y_test_pred).item()
print("mse:",mse)
mes_reg = mean_squared_error(y_true = y_test, y_pred = y_test_pred_reg).item()
print("mse_with_l2_reg:",mes_reg)
# 绘制图像
plt.scatter(X_train, y_train, facecolor="none", edgecolor="#e4007f", s=50, label="train data")
plt.plot(X_underlying, y_underlying, c='#000000', label=r"$\sin(2\pi x)$")
plt.plot(X_underlying, y_underlying_pred, c='#e4007f', linestyle="--", label="$deg. = 8$")
plt.plot(X_underlying, y_underlying_pred_reg, c='#f19ec2', linestyle="-.", label="$deg. = 8, \ell_2 reg$")
plt.ylim(-1.5, 1.5)
plt.annotate("lambda={}".format(reg_lambda), xy=(0.82, -1.4))
plt.legend(fontsize='large')
plt.savefig('ml-vis4.pdf')
plt.show()
运行结果


2.4 Runner类介绍
机器学习方法流程包括数据集构建、模型构建、损失函数定义、优化器、模型训练、模型评价、模型预测等环节。
为了更方便地将上述环节规范化,我们将机器学习模型的基本要素封装成一个Runner类。
除上述提到的要素外,再加上模型保存、模型加载等功能。
Runner类的成员函数定义如下:
- __init__函数:实例化Runner类,需要传入模型、损失函数、优化器和评价指标等;
- train函数:模型训练,指定模型训练需要的训练集和验证集;
- evaluate函数:通过对训练好的模型进行评价,在验证集或测试集上查看模型训练效果;
- predict函数:选取一条数据对训练好的模型进行预测;
- save_model函数:模型在训练过程和训练结束后需要进行保存;
- load_model函数:调用加载之前保存的模型。
import torch
import os
from nndl.opitimizer import optimizer_lsm
class Runner(object):
def __init__(self, model, optimizer, loss_fn, metric):
# 优化器和损失函数为None,不再关注
# 模型
self.model = model
# 评估指标
self.metric = metric
# 优化器
self.optimizer = optimizer
def train(self, dataset, reg_lambda, model_dir):
X, y = dataset
self.optimizer(self.model, X, y, reg_lambda)
# 保存模型
self.save_model(model_dir)
def evaluate(self, dataset, **kwargs):
X, y = dataset
y_pred = self.model(X)
result = self.metric(y_pred, y)
return result
def predict(self, X, **kwargs):
return self.model(X)
def save_model(self, model_dir):
if not os.path.exists(model_dir):
os.makedirs(model_dir)
params_saved_path = os.path.join(model_dir, 'params.pdtensor')
torch.save(model.params, params_saved_path)
def load_model(self, model_dir):
params_saved_path = os.path.join(model_dir, 'params.pdtensor')
self.model.params = torch.load(params_saved_path)
optimizer = optimizer_lsm
# 实例化Runner
runner = Runner(model, optimizer=optimizer, loss_fn=None, metric=mse_loss)
注: optimizer_lsm代码如下:
def optimizer_lsm(model, X, y, reg_lambda=0):
N, D = X.shape
# 对输入特征数据所有特征向量求平均
x_bar_tran = torch.mean(X, axis=0).T
# 求标签的均值,shape=[1]
y_bar = torch.mean(y)
# torch.subtract通过广播的方式实现矩阵减向量
x_sub = torch.subtract(X, x_bar_tran)
# 使用torch.all判断输入tensor是否全0
if torch.all(x_sub == 0):
model.params['b'] = y_bar
model.params['w'] = torch.zeros([D])
return model
# torch.inverse求方阵的逆
tmp = torch.inverse(torch.matmul(x_sub.T, x_sub) +
reg_lambda * torch.eye(D))
w = torch.matmul(torch.matmul(tmp, x_sub.T), (y - y_bar))
b = y_bar - torch.matmul(x_bar_tran, w)
model.params['b'] = b
model.params['w'] = torch.squeeze(w, axis=-1)
return model
Runner类的流程如图2.8所示,可以分为 4 个阶段:
- 初始化阶段:传入模型、损失函数、优化器和评价指标。
- 模型训练阶段:基于训练集调用train()函数训练模型,基于验证集通过evaluate()函数验证模型。通过save_model()函数保存模型。
- 模型评价阶段:基于测试集通过evaluate()函数得到指标性能。
- 模型预测阶段:给定样本,通过predict()函数得到该样本标签。

2.5 基于线性回归的波士顿房价预测
接下来因为涉及到数据预处理,使用Jupyter Notebook跑代码。
2.5.1 数据处理
2.5.1.1 数据预览
import pandas as pd
# 利用pandas加载波士顿房价的数据集
data=pd.read_csv("boston_house_prices.csv")
# 预览前5行数据
data.head()
运行结果

2.5.1.2 数据清洗
- 缺失值分析
# 查看各字段缺失值统计情况
data.isna().sum()
运行结果

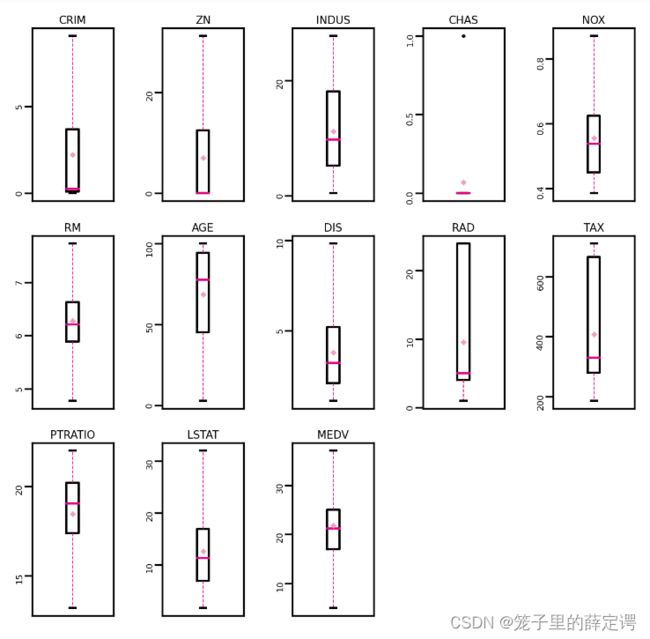
- 异常值处理
通过箱线图直观的显示数据分布,并观测数据中的异常值。箱线图一般由五个统计值组成:最大值、上四分位、中位数、下四分位和最小值。一般来说,观测到的数据大于最大估计值或者小于最小估计值则判断为异常值,其中
最大估计值=上四分位+1.5∗(上四分位−下四分位)
最小估计值=下四分位−1.5∗(上四分位−下四分位)
import matplotlib.pyplot as plt # 可视化工具
# 箱线图查看异常值分布
def boxplot(data, fig_name):
# 绘制每个属性的箱线图
data_col = list(data.columns)
# 连续画几个图片
plt.figure(figsize=(5, 5), dpi=300)
# 子图调整
plt.subplots_adjust(wspace=0.6)
# 每个特征画一个箱线图
for i, col_name in enumerate(data_col):
plt.subplot(3, 5, i+1)
# 画箱线图
plt.boxplot(data[col_name],
showmeans=True,
meanprops={"markersize":1,"marker":"D","markeredgecolor":'#f19ec2'}, # 均值的属性
medianprops={"color":'#e4007f'}, # 中位数线的属性
whiskerprops={"color":'#e4007f', "linewidth":0.4, 'linestyle':"--"},
flierprops={"markersize":0.4},
)
# 图名
plt.title(col_name, fontdict={"size":5}, pad=2)
# y方向刻度
plt.yticks(fontsize=4, rotation=90)
plt.tick_params(pad=0.5)
# x方向刻度
plt.xticks([])
plt.savefig(fig_name)
plt.show()
boxplot(data, 'ml-vis5.pdf')
运行结果 从输出结果看,数据中存在较多的异常值(图中上下边缘以外的空心小圆圈)。
从输出结果看,数据中存在较多的异常值(图中上下边缘以外的空心小圆圈)。
使用四分位值筛选出箱线图中分布的异常值,并将这些数据视为噪声,其将被临界值取代,代码实现如下:
# 四分位处理异常值
num_features=data.select_dtypes(exclude=['object','bool']).columns.tolist()
for feature in num_features:
if feature =='CHAS':
continue
Q1 = data[feature].quantile(q=0.25) # 下四分位
Q3 = data[feature].quantile(q=0.75) # 上四分位
IQR = Q3-Q1
top = Q3+1.5*IQR # 最大估计值
bot = Q1-1.5*IQR # 最小估计值
values=data[feature].values
values[values > top] = top # 临界值取代噪声
values[values < bot] = bot # 临界值取代噪声
data[feature] = values.astype(data[feature].dtypes)
# 再次查看箱线图,异常值已被临界值替换(数据量较多或本身异常值较少时,箱线图展示会不容易体现出来)
boxplot(data, 'ml-vis6.pdf')
运行结果
2.5.1.3 数据集划分
import torch
torch.seed()
# 划分训练集和测试集
def train_test_split(X, y, train_percent=0.8):
n = len(X)
shuffled_indices = torch.randperm(n) # 返回一个数值在0到n-1、随机排列的1-D Tensor
train_set_size = int(n*train_percent)
train_indices = shuffled_indices[:train_set_size]
test_indices = shuffled_indices[train_set_size:]
X = X.values
y = y.values
X_train=X[train_indices]
y_train = y[train_indices]
X_test = X[test_indices]
y_test = y[test_indices]
return X_train, X_test, y_train, y_test
X = data.drop(['MEDV'], axis=1)
y = data['MEDV']
X_train, X_test, y_train, y_test = train_test_split(X,y)# X_train每一行是个样本,shape[N,D]
2.5.1.4 特征工程
为了消除纲量对数据特征之间影响,在模型训练前,需要对特征数据进行归一化处理,将数据缩放到[0, 1]区间内,使得不同特征之间具有可比性。
注:这个在数学建模中用的超级多,因为若指标量纲不同,很难对各个指标进行量化分析。
import torch
X_train = torch.as_tensor(X_train,dtype=torch.float32)
X_test = torch.as_tensor(X_test,dtype=torch.float32)
y_train = torch.as_tensor(y_train,dtype=torch.float32)
y_test = torch.as_tensor(y_test,dtype=torch.float32)
X_min = torch.min(X_train,axis=0)[0]
X_max = torch.max(X_train,axis=0)[0]
X_train = (X_train-X_min)/(X_max-X_min)
X_test = (X_test-X_min)/(X_max-X_min)
# 训练集构造
train_dataset=(X_train,y_train)
# 测试集构造
test_dataset=(X_test,y_test)
2.5.2 模型构建
from nndl.op import Linear
# 模型实例化
input_size = 12
model=Linear(input_size)
注:nndl.op代码如下:
import torch
torch.seed() # 设置随机种子
class Op(object):
def __init__(self):
pass
def __call__(self, inputs):
return self.forward(inputs)
def forward(self, inputs):
raise NotImplementedError
def backward(self, inputs):
raise NotImplementedError
# 线性算子
class Linear(Op):
def __init__(self, input_size):
self.input_size = input_size
# 模型参数
self.params = {}
self.params['w'] = torch.randn(self.input_size, 1)
self.params['b'] = torch.zeros([1])
def __call__(self, X):
return self.forward(X)
# 前向函数
def forward(self, X):
N, D = X.shape
if self.input_size == 0:
return torch.full([N, 1], fill_value=self.params['b'])
assert D == self.input_size # 输入数据维度合法性验证
# 使用torch.matmul计算两个tensor的乘积
y_pred = torch.matmul(X, self.params['w']) + self.params['b']s
return y_pred
2.5.3 完善Runner类
在测试集上使用MSE对模型性能进行评估。
import torch.nn as nn
mse_loss = nn.MSELoss()
具体实现如下:
import torch
import os
from nndl.opitimizer import optimizer_lsm
class Runner(object):
def __init__(self, model, optimizer, loss_fn, metric):
# 优化器和损失函数为None,不再关注
# 模型
self.model = model
# 评估指标
self.metric = metric
# 优化器
self.optimizer = optimizer
def train(self, dataset, reg_lambda, model_dir):
X, y = dataset
self.optimizer(self.model, X, y, reg_lambda)
# 保存模型
self.save_model(model_dir)
def evaluate(self, dataset, **kwargs):
X, y = dataset
y_pred = self.model(X)
result = self.metric(y_pred, y)
return result
def predict(self, X, **kwargs):
return self.model(X)
def save_model(self, model_dir):
if not os.path.exists(model_dir):
os.makedirs(model_dir)
params_saved_path = os.path.join(model_dir, 'params.pdtensor')
torch.save(model.params, params_saved_path)
def load_model(self, model_dir):
params_saved_path = os.path.join(model_dir, 'params.pdtensor')
self.model.params = torch.load(params_saved_path)
optimizer = optimizer_lsm
# 实例化Runner
runner = Runner(model, optimizer=optimizer, loss_fn=None, metric=mse_loss)
注:optimizer_lsm的代码如下
def optimizer_lsm(model, X, y, reg_lambda=0):
N, D = X.shape
# 对输入特征数据所有特征向量求平均
x_bar_tran = torch.mean(X, axis=0).T
# 求标签的均值,shape=[1]
y_bar = torch.mean(y)
# torch.subtract通过广播的方式实现矩阵减向量
x_sub = torch.subtract(X, x_bar_tran)
# 使用torch.all判断输入tensor是否全0
if torch.all(x_sub == 0):
model.params['b'] = y_bar
model.params['w'] = torch.zeros([D])
return model
# torch.inverse求方阵的逆
tmp = torch.inverse(torch.matmul(x_sub.T, x_sub) +
reg_lambda * torch.eye(D))
w = torch.matmul(torch.matmul(tmp, x_sub.T), (y - y_bar))
b = y_bar - torch.matmul(x_bar_tran, w)
model.params['b'] = b
model.params['w'] = torch.squeeze(w, axis=-1)
return model
2.5.4 模型训练
在组装完成Runner之后,我们将开始进行模型训练、评估和测试。首先,我们先实例化Runner,然后开始进行装配训练环境,接下来就可以开始训练了,相关代码如下:
# 模型保存文件夹
saved_dir = './models'
# 启动训练
runner.train(train_dataset,reg_lambda=0,model_dir=saved_dir)
打印出训练得到的权重:
columns_list = data.columns.to_list()
weights = runner.model.params['w'].tolist()
b = runner.model.params['b'].item()
for i in range(len(weights)):
print(columns_list[i],"weight:",weights[i])
print("b:",b)
运行结果

2.5.5 模型测试
# 加载模型权重
runner.load_model(saved_dir)
mse = runner.evaluate(test_dataset)
print('MSE:', mse.item())
运行结果

2.5.6 模型预测
runner.load_model(saved_dir)
pred = runner.predict(X_test[:1])
print("真实房价:",y_test[:1].item())
print("预测的房价:",pred.item())
运行结果
 问题1:使用类实现机器学习模型的基本要素有什么优点?
问题1:使用类实现机器学习模型的基本要素有什么优点?
- 方便复用(如果你用函数写,就要复制整块代码,增加了代码量,增加了出错率)
- 方便扩展(函数写段代码,若要升级、扩展,都十分复杂,容易出错,用类来扩展,则方便清晰)
- 方便维护(因为类是把抽象的东西映射成我们常见的,摸得到的东西,容易理解,维护也方便)
问题2:算子op、优化器opitimizer放在单独的文件中,主程序在使用时调用该文件。这样做有什么优点?
感觉也是方便代码复用和功能的扩展,而且使用分层py文件更加清晰易懂。容易排错,暑期搭一些小模型时候,也是使用model.py、train.py、predict.py,层次结构清晰明了。
问题3:线性回归通常使用平方损失函数,能否使用交叉熵损失函数?为什么?
不能,交叉熵损失函数只和分类正确的预测结果有关。而平方损失函数还和错误的分类有关,该损失函数除了让正确分类尽量变大,还会让错误分类都变得更加平均,但实际中后面的这个调整使没必要的。但是对于回归问题这样的考虑就显得重要了,因而回归问题上使用交叉熵损失函数并不适合。
如果学习模型致力于解决的问题是回归问题的连续变量,那么使用平方损失函数较为合适;若是对于分类问题的离散Ont-Hot向量,那么交叉熵损失函数较为合适
总结
这次实验虽是借鉴老师给定的代码,但也学到了许多东西,感觉非常充实,终于不是玄幻炼丹了,例如以往都是定义好net,只调用
loss_function = nn.CrossEntropyLoss() #定义交叉熵损失
optimizer = optim.Adam(net.parameters(), lr=0.001) #定义优化器
两行代码便定义好网络的损失函数和优化器,这次实验全都是手写,并且将算子、优化器定义成py文件,便于代码的复用,也有利于别人查看自己的代码。
参考优秀博客:
https://blog.csdn.net/weixin_45870904/article/details/118
https://blog.csdn.net/sazass/article/details/109725458
https://blog.csdn.net/jacke121/article/details/104980980/