WoodScape数据集之相机标定参数
WoodScape数据集中以json格式提供了每帧图像对应的相机参数,json文件在calibration文件夹下,名称与图像名一致;
相机标定参数格式:
{
"extrinsic": {
"quaternion": [
0.5946970238045494,
-0.5837953694518585,
0.39063952590941586,
-0.3910488170060691
],
"translation": [
3.7484,
0.0,
0.6577999999999999
]
},
"intrinsic": {
"aspect_ratio": 1.0,
"cx_offset": 3.942,
"cy_offset": -3.093,
"height": 966.0,
"k1": 339.749,
"k2": -31.988,
"k3": 48.275,
"k4": -7.201,
"model": "radial_poly",
"poly_order": 4,
"width": 1280.0
},
"name": "FV"
}
其中:
-
车体坐标系:ISO 8855标准

X 轴平行于车辆的 heading 朝前;
Y 轴垂直于 X 轴朝左;
Z 轴垂直于 X, Y 轴朝向车辆的上方;
坐标系原点位于车辆后轴中心点下方的地面上; -
相机坐标系
与opencv中所规定的相机坐标系一致,遵循右手定则; -
旋转和平移变换关系为从相机坐标系到车体坐标系;
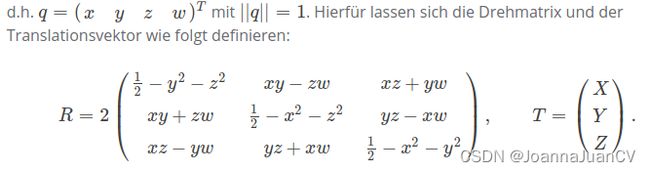
json文件以四元数形式表征旋转矩阵;平移矩阵的单位为m;
四元数转旋转矩阵公式:
void getRotation(double *Quaternion, double *rt_mat)
{
//q:[x, y, z, w]
rt_mat[0] = 1 - 2 * (Quaternion[1] * Quaternion[1]) - 2 * (Quaternion[2] * Quaternion[2]);
rt_mat[1] = 2 * Quaternion[0] * Quaternion[1] - 2 * Quaternion[2] * Quaternion[3];
rt_mat[2] = 2 * Quaternion[0] * Quaternion[2] + 2 * Quaternion[1] * Quaternion[3];
rt_mat[3] = 2 * Quaternion[0] * Quaternion[1] + 2 * Quaternion[2] * Quaternion[3];
rt_mat[4] = 1 - 2 * (Quaternion[0] * Quaternion[0]) - 2 * (Quaternion[2] * Quaternion[2]);
rt_mat[5] = 2 * Quaternion[1] * Quaternion[2] - 2 * Quaternion[0] * Quaternion[3];
rt_mat[6] = 2 * Quaternion[0] * Quaternion[2] - 2 * Quaternion[1] * Quaternion[3];
rt_mat[7] = 2 * Quaternion[1] * Quaternion[2] + 2 * Quaternion[0] * Quaternion[3];
rt_mat[8] = 1 - 2 * (Quaternion[0] * Quaternion[0]) - 2 * (Quaternion[1] * Quaternion[1]);
}
相机坐标系到车体坐标系的变换矩阵为:
cv::Mat Trans = (cv::Mat_<double>(4, 4) << R[0], R[1], R[2],T[0],
R[3], R[4], R[5], T[1],
R[6], R[7], R[8], T[2],
0, 0, 0, 1);
车体坐标系到相机坐标系的变换矩阵为:
cv::Mat invT = Trans.inv();
- 鱼眼相机模型
相机坐标系下的三维点(X, Y, Z),对应点在鱼眼图像上的坐标(u,v)计算:
chi = sqrt( X ** 2 + Y ** 2)
theta = arctan2( chi, Z ) = pi / 2 - arctan2( Z, chi )
rho(theta) = k1 * theta + k2 * theta ** 2 + k3 * theta ** 3 + k4 * theta ** 4
rho = rho(theta)
u’ = rho * X / chi if chi != 0 else 0
v’ = rho * Y / chi if chi != 0 else 0
u = u’ + cx + width / 2 - 0.5
v = v’ * aspect_ratio + cy + height / 2 - 0.5