论文笔记系列:经典主干网络(一)-- VGG
✨写在前面:强烈推荐给大家一个优秀的人工智能学习网站,内容包括人工智能基础、机器学习、深度学习神经网络等,详细介绍各部分概念及实战教程,通俗易懂,非常适合人工智能领域初学者及研究者学习。➡️点击跳转到网站。
深度卷积神经网络VGG
前言:VGGNet 是由牛津大学视觉几何小组(Visual Geometry Group, VGG)提出的一种深层卷积网络结构,他们以 7.32% 的错误率赢得了 2014 年 ILSVRC 分类任务的亚军(冠军由 GoogLeNet 以 6.65% 的错误率夺得)和 25.32% 的错误率夺得定位任务(Localization)的第一名(GoogLeNet 错误率为 26.44%)。VGG可以看成是加深版本的AlexNet,都是conv layer + FC layer。
论文地址:https://arxiv.org/abs/1409.1556
VGG框架导图:
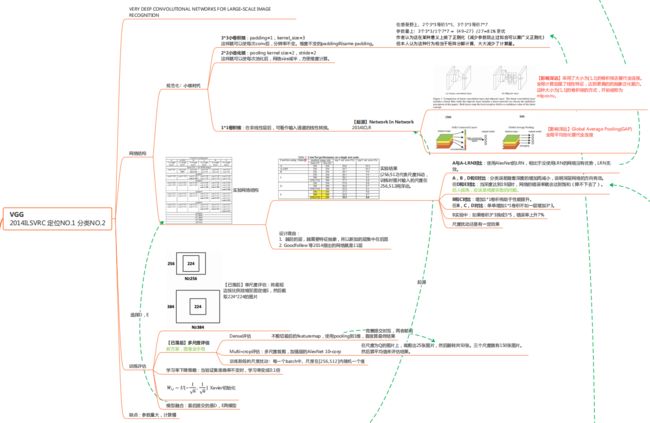
VGG结构介绍:
为了解决初始化(权重初始化)等问题,VGG采用的是一种Pre-training的方式,先训练浅层的的简单网络 VGG11,再复用 VGG11 的权重来初始化 VGG13,如此反复训练并初始化 VGG19,能够使训练时收敛的速度更快。整个网络都使用卷积核尺寸为 3×3 和最大池化尺寸 2×2。比较常用的VGG-16的16指的是conv+fc的总层数是16,不包括max pool的层数。
VGG论文
摘要: 介绍网络深度与精度之间的联系,提出深度卷积模型
1. Introduction: Convnet的成功得益于大量数据及高性能GPU;介绍本论文主要贡献
2. ConvNet Configurations: 讲解11-19层的VGG网络结构;3*3卷积与5*5/7*7卷积的感受野等价
3. Classification Framework: VGG网络的分类实验,训练及测试详细步骤;Multi-scale训练,Multi crop/Dense 测试
4. Classification Experiments: 多种设置下的分类结果对比;单尺度评估,多尺度评估,多次裁剪评估,模型融合,最优模型对比
5. Conclusion: 强调深度对convnet是有益的,本文提出的VGG模型获得优异结果
一、VGG模型结构
模型结构设计的特点
小卷积核,堆叠使用卷积核,分辨率减半,通道数翻倍
3x3卷积的优点:
多个3×3的卷积层比一个大尺寸的filter有更少的参数,假设卷基层的输入和输出的特征图大小相同为C,那么三个3×3的卷积层参数个数3×(3×3×C×C)=27CC;一个7×7的卷积层参数为49CC;所以可以把三个3×3的filter看成是一个7×7filter的分解(中间层有非线性的分解)
①体系结构(论文中的2.1)
输入的尺寸是固定的224×224;
预处理方式:每个像素分别减去 RGB三个通道均值,可以加速模型的训练;
卷积层:小卷积核3×3,也尝试了1×1卷积(借鉴了NIN)。卷积不改变分辨率,会用padding填充像素;
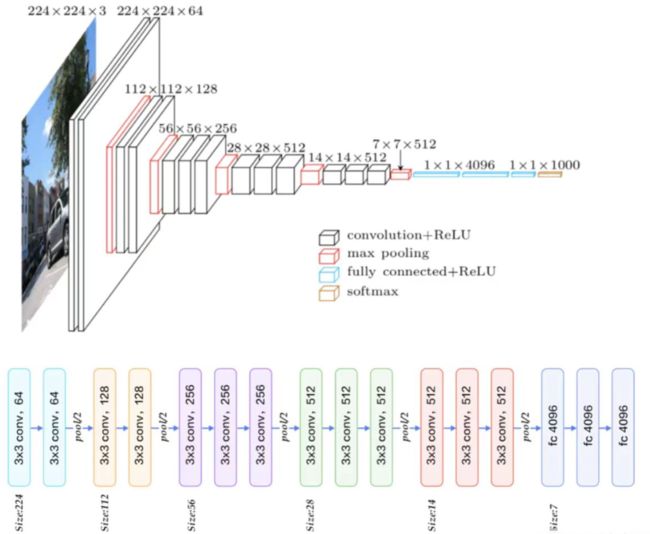
池化层:使用5个池化,每个池化用2×2的池化窗口,步长为2,分辨率降低了一半。224×224经过5次池化后,输出为7×7 (因为224/32=7),再拉成一个向量的形式接入FC层;
全连接层:前两个层各有4096个通道,第三层执行1000路分类;
在隐藏层配备了ReLU,没有使用LRN,是因为不能提升性能,哈辉导致内存消耗和计算时间的增加。
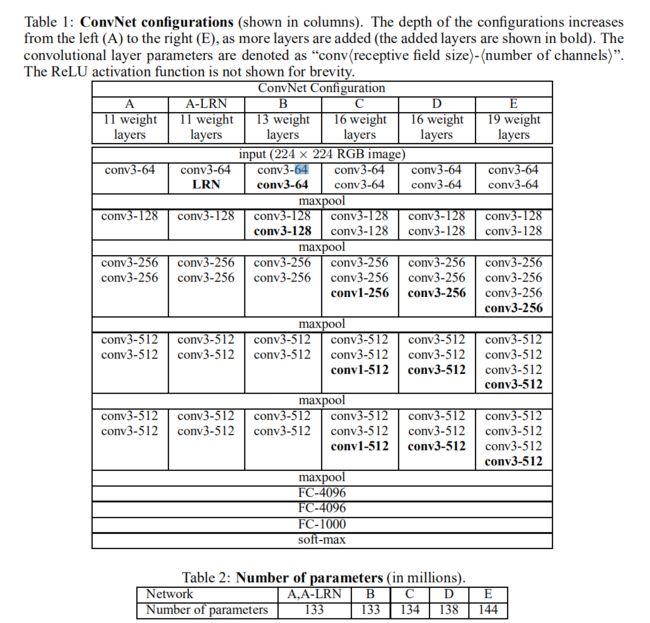
②配置(论文中的2.2)
从A->E,网络的深度从11个权值层(8个卷积层+3个全连接层)到19个权值层(16个卷积层+3个全连接层),卷积核数量从64-512。
每经过一次池化,卷积核数量就乘以2。(因为池化后减少了一半的分辨率,信息减少了,所以要用更多的卷积核 得到更多的特征图,把丢失的信息补充回来,不至于信息数据减少的太少了)
网络深度从11-19层,但参数并没有变得很多。
③结构特点的探讨(论文中的2.3)
堆叠使用3×3卷积的好处(每一段对应一个):
可以增大感受野。感受野等价,2个3×3堆叠等价于一个5×5;3个3×3堆叠等价于1个7×7。
减少训练参数。3个3×3比1个7×7节省81%参数,卷积参数计算公式 3(3²C²)=27C²;7²C²=49C²,(49-27)/27=81%,所以参数量增加81%
采用1×1卷积核的好处,增加了非线性的能力(特征提取的能力),可以增加特征抽象能力,提升模型效果。根据NIN借鉴的。
④表格分析
VGGNet有两种结构,分别为16层和19层。从下图中可以看出,在VGGNet结构中,所有卷积层的卷积核尺寸都只有(3,3)。VGGNet中连续使用3组(3,3)卷积核(滑动步长为1)是因为它和使用1个(7,7)卷积核产生的效果相同(图5-6以一维卷积为例,解释效果相同的原理)。然而更深的网络结构可以学习到更复杂的非线性关系,从而使模型的训练效果更好。该操作带来的另一个好处是减少参数数量,因为对于一个有C个卷积核的卷积层来说,原来的参数个数为7×7×C,而新的参数个数为3×(3×3×C)。
(1)对于表1的理解–以A网络为例:
进行第一组卷积操作时,输入是3×224×224,经过64个卷积核,经过2×2、步长为2的最大池化,分辨率减少一半,变成112×112;
进行第二组卷积操作,经过64×2=128个卷积核,经过池化之后,分辨率再减少一半,变成56×56;
第三组卷积操作,经过128×2=256个卷积核,经过池化之后,分辨率变为28×28;
第四组卷积操作,卷积核达到512,池化之后,得到分辨率为14×14的特征图;
第五组卷积操作,使用2个3×3的卷积核堆叠,再池化,分辨率变为7×7。
将7×7的特征图拉成一个向量,得到49×512个神经元(512个特征图),进入三个全连接层(神经元个数分别 4096 4096 100)
(2)A-E模型变换 演变过程:
A:11层卷积
A-LRN:第一组卷积操作结束的时候加了LRN
B:加深了网络模型,在第一组和第二组卷积操作中分别加一个3×3的卷积
C:在3.4.5组卷积的地方做了1×1卷积的尝试,(借鉴NIN,从激活函数考虑,1×1卷积就是做了一个线性变换),C增加了模型非线性的映射能力,精度有所提升。
D:vgg16,在C的基础上,把1×1卷积全部换成3×3卷积,可以获取更大的感受野,看看有没有更大的提升
E:vgg19,在3.4.5组卷积再增加一个3×3的卷积
(3)A-E的共性:
(1) 5个maxpool降低分辨率
(2) 池化后,特征图通道数要翻倍,直至512
(3) 3个FC层进行分类输出
(4) 池化之间采用多个卷积层堆叠,对特征进行提取和抽象
(4)A-E的对比:
A-B只针对1,2靠前的两组卷积操作增加卷积核,后面C-E只在后面三组增加卷积层。
是否越靠后的特征图 要利用的更多、抽象的 需要非线性更强的映射能力的卷积核操作 去完成? 可能堆叠更多的卷积层,使用更多的非线性激活函数,非线性映射能力比较强。
1 参数量对比
虽然网络层增加了8层,但参数量并没有增加太多(优点)。
原因:AlexNet在全连接层占了一半的参数,所以增加小的3×3卷积层,参数不会增加太多的。
2 每组卷积操作中,卷积层堆叠的个数不同
二、分类框架(论文中的3)
①训练技巧(论文中的3.1 训练阶段)
设置S的两种方法:
固定值:256/384;
随机值:每个batch的S在[256,512]随机采样,实现尺度扰动
(1)数据增强——尺度扰动
针对位置/尺寸———尺寸扰动 scale jittering
训练阶段的尺寸扰动:按比例缩放图片至最小边为s;随机位置裁剪出224×224;随机进行水平翻转。
(2)预训练模型初始化 :加速模型训练
利用浅层模型初始化深度的模型——BCDE使用A模型初始化
训练过程中尺度不同的时候,用小尺度上训练好的模型去初始化即将要训练的大尺度的模型——
S=384时,用S=256进行模型初始化;S=[256,512]时,用S=384模型初始化。
3.1第一段:
具体训练超参数的设置:batch size=256、momentum=0.9、L2=5*10^-4、学习率=0.01
学习率下降策略:每次下降×0.1,当验证集准确率不再上升的时候,就下降学习率。在pytorch中有对应的函数实现 reduce on Plateau
训练了74轮,迭代了370K次
3.1第二段:
网络初始化的设置:
深层网络初训练时,会用浅层网络的权重进行初始化。
先训练最浅的A模型。随机初始化。往后训练时,利用A模型前面的卷积层 以及相应的FC层 参数对应初始化到后面的模型。如果没有对应的层,就随机初始化。0均值,偏置=0。
Xavier初始化:直接全部采用Xavier,不要借鉴浅层的参数
3.1第三段:关于训练图片尺寸的设置:
(1) 超参数s:训练图片经过等比例缩放之后的最短边。卷积网络输入在缩放的图片上进行裁剪224×224。S不能小于224,不然图像会丢失。
(2) 设置S的两种方法:
固定值:256/384;
随机值:每个batch的S在[256,512]随机采样,实现尺度扰动
(3) 训练阶段的尺度扰动:
每个batch的s在[256,512]随机采样一个尺寸,按照s裁剪,实现尺度扰动;
多尺度multi-scale training用单尺度模型初始化.
②测试技巧——多尺度测试(论文中的3.2 测试阶段)
设置Q:
图片等比例缩放至最短边为Q
设置3个Q,对图片进行预测,取平均
1 当S为固定值时 Q=[S-32, S , S+32]
2 当S为随机值时,Q=(S_min,0.5*(S_min+S_max), S_max)
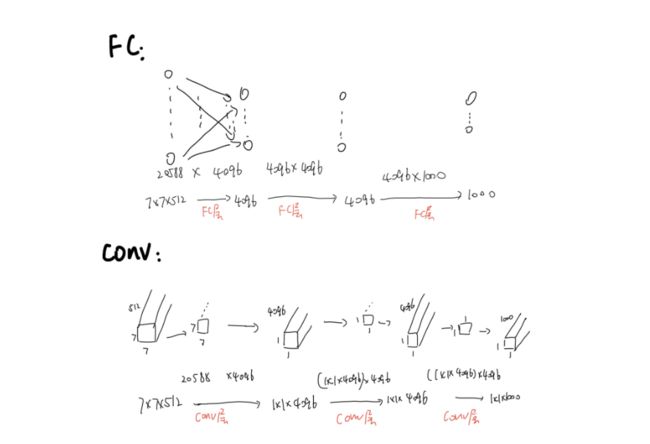
(1)Dense稠密测试
将FC层转换为卷积操作,变为全卷积网络,实现任意尺寸图片输入。
1.FC层的权重数量是固定的,若训练和测试的size不一样,size不匹配的话会报错 。
CONV层,根据输入的大小在3个conv层进行计算,得到与输入数据相关的尺寸的feature map,再在h和w两个维度取平均,变成所要的1×1×1000
2.FC替换成CONV
(2)Multi-crop测试
step1 等比例缩放至三种尺寸Q1,Q2,Q3
step2
方法一 Dense 全卷积
方法二 multi-crop 多个位置裁剪224*224区域
方法三 multi-crop&Dense 综合取平均
Q:256,384,512
若Q=256,先截取224,256-224=32,还要截取4下,所以移动步长为32/4=8
3.2第一段:
稠密测试的过程,实现任意尺寸图片输入
图片等比例缩放至Q,Q可以≠S,将整张图片输入到模型中
稠密测试法:FC替换成1×1的卷积层,可以接受任意尺度的输入图片,输出特征图大小会根据输入的尺寸有所变化。
得到类分数特征图,进行平均池化,(与multi-crop得到的值做平均本质一样的,但稠密测试是整张图输入进去,可以高效地实现这个过程,避免了一系列的重复的卷积运算)
水平翻转的图片再进行一次稠密测试,之后再与原始图片的softmax的posteriors 取平均,得到最终值。
3.2第二段:
alexnet的tencrop有重复计算
multi-crop与dense互为补充
multi-crop:一张图片最终得到150张。
一个尺度用5×5的网格裁剪,得到25张图片,水平翻转后得到25×2=50张图片,有三个尺度,所以一共得到50×3=150张图片
三、实验结果及分析(论文中的4)
① single scale 单尺度(论文中4.1)
S为固定值时,Q=S,S为随机值时,Q=0.5(S_min+S_max)
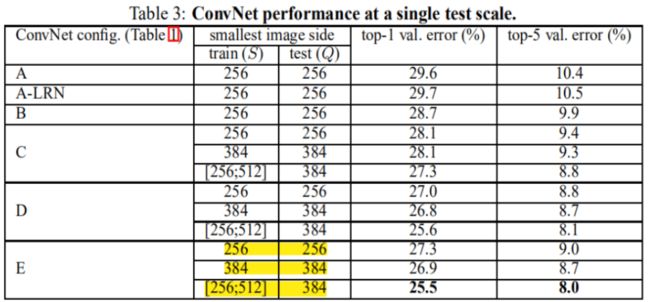
- 误差随深度加深而降低,当模型到达19层时,误差饱和不再下降;
- 增加1×1有助于性能提升
- 训练时加入尺度扰动,有助于性能提升
② multi-scale 多尺度(论文中4.2)

- 测试时采用尺度扰动有助于性能提升
③ multi-crop 多次裁剪(论文中4.3)

等步长的滑动224×224的窗口进行裁剪,1张图片得到150张图片输入到模型中。
- multi-crop优于dense
- multi-crop结合dense,可以形成互补,达到最优结果
互补:3.2中解释到,multi crop 卷积边界用padding是0去填充,缺少边界信息,Dense的边界有原始图片的信息
④ convnet fusion 模型融合(论文中4.4)

- DE模型比较深,dense, multi crop 结合,得到最优结果。
⑤ comparison with the state of art 对比当前最优模型(论文中4.5)

- 单模型时,vgg优于GoogleNet,并且vgg结构简单。
VGG总结:
- vgg-block内的卷积层都是同结构的,池化层都得上一层的卷积层特征缩减一半
- 深度较深,参数量够大,较小的filter size/kernel size
VGG16的keras实现
def VGG_16():
model = Sequential()
model.add(Conv2D(64,(3,3),strides=(1,1),input_shape=(224,224,3),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(64,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(MaxPooling2D(pool_size=(2,2)))
model.add(Conv2D(128,(3,2),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(128,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(MaxPooling2D(pool_size=(2,2)))
model.add(Conv2D(256,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(256,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(256,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(MaxPooling2D(pool_size=(2,2)))
model.add(Conv2D(512,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(512,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(512,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(MaxPooling2D(pool_size=(2,2)))
model.add(Conv2D(512,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(512,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(Conv2D(512,(3,3),strides=(1,1),padding='same',activation='relu',kernel_initializer='uniform'))
model.add(MaxPooling2D(pool_size=(2,2)))
model.add(Flatten())
model.add(Dense(4096,activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(4096,activation='relu'))
model.add(Dropout(0.5))
model.add(Dense(1000,activation='softmax'))
return modelVGG19另一种方法实现
from tensorflow import keras
import tensorflow as tf
class Vgg_block(keras.layers.Layer):
def __init__(self,units,filters,**kwargs):
super().__init__(**kwargs)
self.main_layer = []
for i in range(units):
self.main_layer.append(keras.layers.Conv2D(filters=filters,kernel_size=(3,2),
padding="same",strides=(1,1),
activation="relu"))
self.main_layer.append(keras.layers.MaxPool2D(pool_size=(2,2)))
def call(self,inputs):
Z = inputs
for layer in self.main_layer:
Z = layer(Z)
return Z
model = keras.models.Sequential()
model.add(keras.layers.Input(shape=(224,224,3)))
model.add(Vgg_block(2,64))
model.add(Vgg_block(2,128))
model.add(Vgg_block(4,256))
model.add(Vgg_block(4,512))
model.add(Vgg_block(4,512))
model.add(keras.layers.Flatten())
model.add(keras.layers.Dense(4096,activation="relu"))
model.add(keras.layers.Dropout(0.5))
model.add(keras.layers.Dense(4096,activation="relu"))
model.add(keras.layers.Dropout(0.5))
model.add(keras.layers.Dense(1000,activation="softmax"))
参考资料:
论文笔记:主干网络——VGG
卷积神经网络之VGG - 知乎
快速理解VGG网络
本论文系列主要介绍主干网络,后续会在此基础上更新其他部分网络,仅供个人学习参考!