万字长文搞懂MobileNetv1模型
MobileNetv1 论文详解
MobileNet论文的主要贡献在于提出了一种深度可分离卷积架构(DW+PW 卷积),先通过理论证明这种架构比常规的卷积计算成本(Mult-Adds)更小,然后通过分类、检测等多种实验证明模型的有效性。(正经标题:MobileNet v1 论文详解。)
文章首发于 github 和 知乎。
1、相关工作
标准卷积
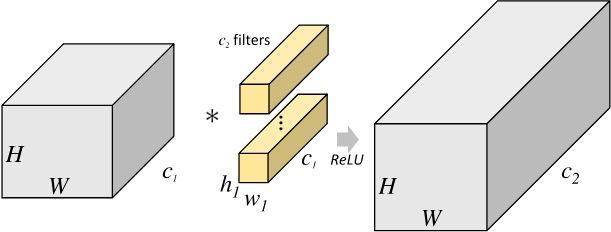
一个大小为 h 1 × w 1 h_1\times w_1 h1×w1 过滤器(2 维卷积核),沿着 feature map 的左上角移动到右下角,过滤器每移动一次,将过滤器参数矩阵和对应特征图 h 1 × w 1 × c 1 h_1 \times w_1 \times c_1 h1×w1×c1 大小的区域内的像素点相乘后累加得到一个值,又因为 feature map 的数量(通道数)为 c 1 c_1 c1,所以我们需要一个 shape 为 $ (c_1, h_1, w_1)$ 的滤波器( 3 维卷积核),将每个输入 featue map 对应输出像素点位置计算和的值相加,即得到输出 feature map 对应像素点的值。又因为输出 feature map 的数量为 c 2 c_2 c2 个,所以需要 c 2 c_2 c2 个滤波器。标准卷积抽象过程如下图所示。
2D 卷积计算过程动态图如下,通过这张图能够更直观理解卷积核如何执行滑窗操作,又如何相加并输出 c 2 c_2 c2 个 feature map ,动态图来源 这里。

分组卷积
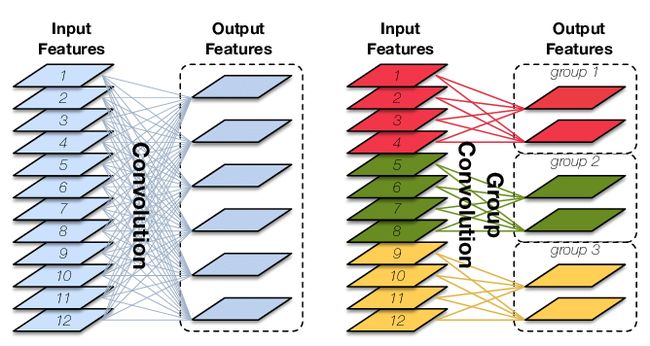
Group Convolution 分组卷积,最早见于 AlexNet。常规卷积与分组卷积的输入 feature map 与输出 feature map 的连接方式如下图所示,图片来自CondenseNet。
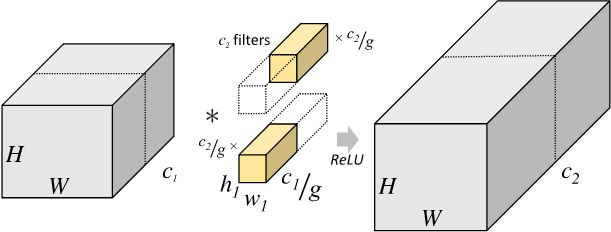
分组卷积的定义:对输入 feature map 进行分组,然后分组分别进行卷积。假设输入 feature map 的尺寸为 H × W × c 1 H \times W \times c_{1} H×W×c1,输出 feature map 数量为 c 2 c_2 c2 个,如果将输入 feature map 按通道分为 g g g 组,则每组特征图的尺寸为 H × W × c 1 g H \times W \times \frac{c_1}{g} H×W×gc1,每组对应的滤波器(卷积核)的 尺寸 为 h 1 × w 1 × c 1 g h_{1} \times w_{1} \times \frac{c_{1}}{g} h1×w1×gc1,每组的滤波器数量为 c 2 g \frac{c_{2}}{g} gc2 个,滤波器总数依然为 c 2 c_2 c2 个,即分组卷积的卷积核 shape 为 ( c 2 , c 1 g , h 1 , w 1 ) (c_2,\frac{c_1}{g}, h_1,w_1) (c2,gc1,h1,w1)。每组的滤波器只与其同组的输入 map 进行卷积,每组输出特征图尺寸为 H × W × c 2 g H \times W \times \frac{c_{2}}{g} H×W×gc2,将 g g g 组卷积后的结果进行拼接 (concatenate) 得到最终的得到最终尺寸为 H × W × c 2 H \times W \times c_2 H×W×c2 的输出特征图,其分组卷积过程如下图所示:
分组卷积的意义:分组卷积是现在网络结构设计的核心,它通过通道之间的稀疏连接(也就是只和同一个组内的特征连接)来降低计算复杂度。一方面,它允许我们使用更多的通道数来增加网络容量进而提升准确率,但另一方面随着通道数的增多也对带来更多的 M A C MAC MAC。针对 1 × 1 1 \times 1 1×1 的分组卷积, M A C MAC MAC 和 F L O P s FLOPs FLOPs 计算如下:
M A C C = H × W × 1 × 1 × c 1 g c 2 g × g = h w c 1 c 2 g F L O P s = 2 × M A C C P a r a m s = g × c 2 g × c 1 g × 1 × 1 + c 2 = c 1 c 2 g M A C = H W ( c 1 + c 2 ) + c 1 c 2 g \begin{align*} & MACC = H \times W \times 1 \times 1 \times \frac{c_{1}}{g}\frac{c_{2}}{g} \times g = \frac{hwc_{1}c_{2}}{g} \\\\ & FLOPs = 2 \times MACC \\\\ & Params = g \times \frac{c_2}{g}\times\frac{c_1}{g} \times 1\times 1 + c_2 = \frac{c_{1}c_{2}}{g} \\\\ & MAC = HW(c_1 + c_2) + \frac{c_{1}c_{2}}{g} \\\\ \end{align*} MACC=H×W×1×1×gc1gc2×g=ghwc1c2FLOPs=2×MACCParams=g×gc2×gc1×1×1+c2=gc1c2MAC=HW(c1+c2)+gc1c2
从以上公式可以得出分组卷积的参数量和计算量是标准卷积的 1 g \frac{1}{g} g1 的结论 ,但其实对分组卷积过程进行深入理解之后也可以直接得出以上结论。
分组卷积的深入理解:对于 1 × 1 1\times 1 1×1 卷积,常规卷积输出的特征图上,每一个像素点是由输入特征图的 c 1 c_1 c1 个点计算得到,而分组卷积输出的特征图上,每一个像素点是由输入特征图的 $ \frac{c_1}{g}$个点得到(参考常规卷积计算过程)。卷积运算过程是线性的,自然,分组卷积的参数量和计算量是标准卷积的 1 g \frac{1}{g} g1 了。
当分组卷积的分组数量 = 输入 feature map 数量 = 输出 feature map 数量,即 g = c 1 = c 2 g=c_1=c_2 g=c1=c2,有 c 1 c_1 c1 个滤波器,且每个滤波器尺寸为 1 × K × K 1 \times K \times K 1×K×K 时,Group Convolution 就成了 Depthwise Convolution(DW 卷积),DW 卷积的卷积核权重尺寸为 ( c 1 , 1 , K , K ) (c_{1}, 1, K, K) (c1,1,K,K)。
常规卷积的卷积核权重 shape 都为(
C_out, C_in, kernel_height, kernel_width),分组卷积的卷积核权重shape为(C_out, C_in/g, kernel_height, kernel_width),DW卷积的卷积核权重shape为(C_in, 1, kernel_height, kernel_width)。
从 Inception module 到 depthwise separable convolutions
深度可分离卷积(depthwise separable convolutions)的提出最早来源于 Xception 论文,Xception 的论文中提到,对于卷积来说,卷积核可以看做一个三维的滤波器:通道维+空间维(Feature Map 的宽和高),常规的卷积操作其实就是实现通道相关性和空间相关性的联合映射。Inception 模块的背后存在这样的一种假设:卷积层通道间的相关性和空间相关性是可以退耦合(完全可分)的,将它们分开映射,能达到更好的效果(the fundamental hypothesis behind Inception is that cross-channel correlations and spatial correlations are sufficiently decoupled that it is preferable not to map them jointly.)。
引入深度可分离卷积的 Inception,称之为 Xception,其作为 Inception v3 的改进版,在 ImageNet 和 JFT 数据集上有一定的性能提升,但是参数量和速度并没有太大的变化,因为 Xception 的目的也不在于模型的压缩。深度可分离卷积的 Inception 模块如图 Figure 4 所示。

Figure 4 中的“极限” Inception 模块与本文的主角-深度可分离卷积模块相似,区别在于:深度可分离卷积先进行 channel-wise 的空间卷积,再进行 1 × 1 1 \times 1 1×1 的通道卷积,Figure 4 的 Inception 则相反;
2、MobileNets 结构
depthwise separable convolutions
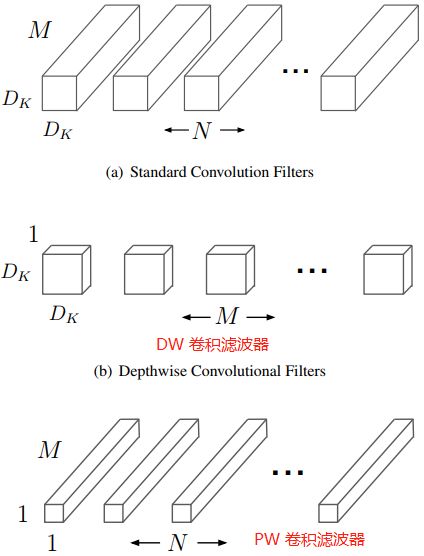
MobileNets 是谷歌 2017 年提出的一种高效的移动端轻量化网络,其核心是深度可分离卷积。depthwise separable convolutions(深度可分离卷积) 的核心思想是将一个完整的卷积运算分解为两步进行,分别为 Depthwise Convolution(DW 卷积) 与 Pointwise Convolution(PW 卷积)。深度可分离卷积的计算步骤和滤波器尺寸如下所示。

Depthwise 卷积
注意本文 DW 和 PW 卷积计算量的计算与论文有所区别,本文的输出 Feature map 大小是 D G × D G D_G \times D_G DG×DG, 论文公式是 D F × D F D_F \times D_F DF×DF。
不同于常规卷积操作, Depthwise Convolution 的一个卷积核只负责一个通道,一个通道只能被一个卷积核卷积(不同的通道采用不同的卷积核卷积),也就是输入通道、输出通道和分组数相同的特殊分组卷积,因此 Depthwise(DW)卷积不会改变输入特征图的通道数目。深度可分离卷积的 DW卷积步骤如下图:

DW 卷积的计算量 M A C C = M × D G 2 × D K 2 MACC = M \times D_{G}^{2} \times D_{K}^{2} MACC=M×DG2×DK2
Pointwise 卷积
上述 Depthwise 卷积的问题在于它让每个卷积核单独对一个通道进行计算,但是各个通道的信息没有达到交换,从而在网络后续信息流动中会损失通道之间的信息,因此论文中就加入了 Pointwise 卷积操作,来进一步融合通道之间的信息。PW 卷积是一种特殊的常规卷积,卷积核的尺寸为 1 × 1 1 \times 1 1×1。PW 卷积的过程如下图:

假设输入特征图大小为 D G × D G × M D_{G} \times D_{G} \times M DG×DG×M,输出特征图大小为 D G × D G × N D_{G} \times D_{G} \times N DG×DG×N,则滤波器尺寸为 1 × 1 × M 1 \times 1 \times M 1×1×M,且一共有 N N N 个滤波器。因此可计算得到 PW 卷积的计算量 M A C C = N × M × D G 2 MACC = N \times M \times D_{G}^{2} MACC=N×M×DG2。
综上:Depthwise 和 Pointwise 卷积这两部分的计算量相加为 M A C C 1 = M × D G 2 × D K 2 + N × M × D G 2 MACC1 = M \times D_{G}^{2} \times D_{K}^{2} + N \times M \times D_{G}^{2} MACC1=M×DG2×DK2+N×M×DG2,而标准卷积的计算量 M A C C 2 = N × D G 2 × D K 2 × M MACC2 = N \times D_{G}^{2} \times D_{K}^{2} \times M MACC2=N×DG2×DK2×M。所以深度可分离卷积计算量于标准卷积计算量比值的计算公式如下。
D e p t h w i s e S e p a r a b l e C o n v S t a n d a r d C o n v = M × D G 2 ( D K 2 + N ) N × D G 2 × D K 2 × M = D K 2 + N D K 2 × N = 1 N + 1 D K 2 \begin{align*} \frac{Depthwise \ Separable \ Conv}{Standard \ Conv} &= \frac{M \times D_{G}^{2}(D_{K}^{2} + N)}{N \times D_{G}^{2} \times D_{K}^{2} \times M} \\\\ &= \frac{D_{K}^{2} + N}{D_{K}^{2} \times N} \\\\ &= \frac{1}{N} + \frac{1}{D_{K}^{2}} \\\\ \end{align*} Standard ConvDepthwise Separable Conv=N×DG2×DK2×MM×DG2(DK2+N)=DK2×NDK2+N=N1+DK21
可以看到 Depthwise + Pointwise 卷积的计算量相较于标准卷积近乎减少了 N N N 倍, N N N 为输出特征图的通道数目,同理参数量也会减少很多。在达到相同目的(即对相邻元素以及通道之间信息进行计算)下, 深度可分离卷积能极大减少卷积计算量,因此大量移动端网络的 backbone 都采用了这种卷积结构,再加上模型蒸馏,剪枝,能让移动端更高效的推理。
深度可分离卷积的详细计算过程可参考 Depthwise卷积与Pointwise卷积。
2.2、网络结构
3 × 3 3 \times 3 3×3 的深度可分离卷积 Block 结构如下图所示:
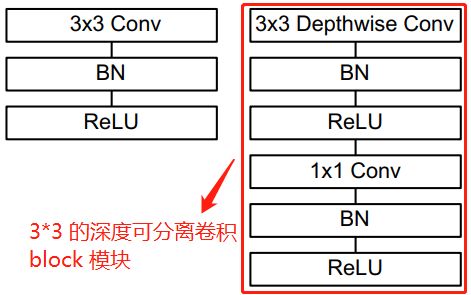
左边是带 bn 和 relu 的标准卷积层,右边是带 bn 和 relu 的深度可分离卷积层。
3 × 3 3 \times 3 3×3 的深度可分离卷积 Block 网络的 pytorch 代码如下:
class MobilnetV1Block(nn.Module):
"""Depthwise conv + Pointwise conv"""
def __init__(self, in_channels, out_channels, stride=1):
super(MobilnetV1Block, self).__init__()
# dw conv kernel shape is (in_channels, 1, ksize, ksize)
self.dw = nn.Conv2d(in_channels, in_channels, kernel_size=3,stride=stride,padding=1, groups=in_channels, bias=False)
self.bn1 = nn.BatchNorm2d(in_channels)
self.pw = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0, bias=False)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, x):
out1 = F.relu(self.bn1(self.dw(x)))
out2 = F.relu(self.bn2(self.pw(out1)))
return out2
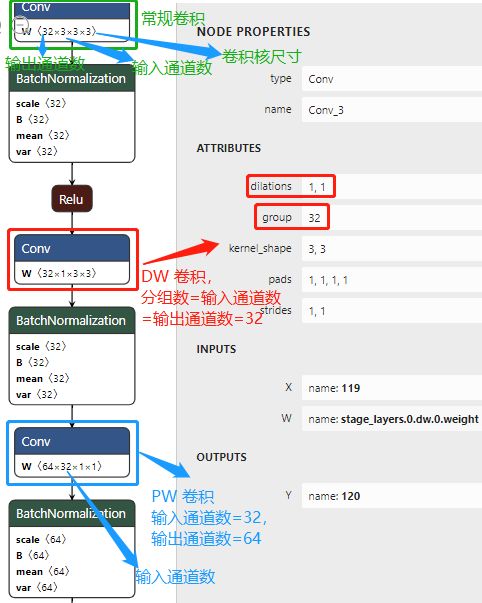
MobileNet v1 的 pytorch 模型导出为 onnx 模型后,深度可分离卷积 block 结构图如下图所示。
仅用 MobileNets 的 Mult-Adds(乘加操作)次数更少来定义高性能网络是不够的,确保这些操作能够有效实施也很重要。例如非结构化稀疏矩阵运算(unstructured sparse matrix operations)通常并不会比密集矩阵运算(dense matrix operations)快,除非是非常高的稀疏度。
这句话是不是和
shufflenet v2的观点一致,即不能仅仅以 FLOPs 计算量来表现网络的运行速度,除非是同一种网络架构。
MobileNet 模型结构将几乎所有计算都放入密集的 1×1 卷积中(dense 1 × 1 convolutions),卷积计算可以通过高度优化的通用矩阵乘法(GEMM)函数来实现。 卷积通常由 GEMM 实现,但需要在内存中进行名为 im2col 的初始重新排序,然后才映射到 GEMM。 caffe 框架就是使用这种方法实现卷积计算。 1×1 卷积不需要在内存中进行重新排序,可以直接使用 GEMM(最优化的数值线性代数算法之一)来实现。
如表 2 所示,MobileNet 模型的 1x1 卷积占据了 95% 的计算量和 75% 的参数,剩下的参数几乎都在全连接层中, 3x3 的 DW 卷积核常规卷积占据了很少的计算量(Mult-Adds)和参数。

2.3、宽度乘系数-更小的模型
尽管基本的 MobileNet 体系结构已经很小且网络延迟 latency 很低,但很多情况下特定用例或应用可能要求模型变得更小,更快。为了构建这些更小且计算成本更低的模型,我们引入了一个非常简单的参数 α \alpha α,称为 width 乘数。宽度乘数 α \alpha α 的作用是使每一层的网络均匀变薄。对于给定的层和宽度乘数 α \alpha α,输入通道的数量变为 α M \alpha M αM,而输出通道的数量 N N N 变为 α N \alpha N αN。具有宽度乘数 α \alpha α 的深度可分离卷积(其它参数和上文一致)的计算成本为:
α M × D G 2 × D K 2 + α N × α M × D G 2 \alpha M \times D_{G}^{2} \times D_{K}^{2} + \alpha N \times \alpha M \times D_{G}^{2} αM×DG2×DK2+αN×αM×DG2
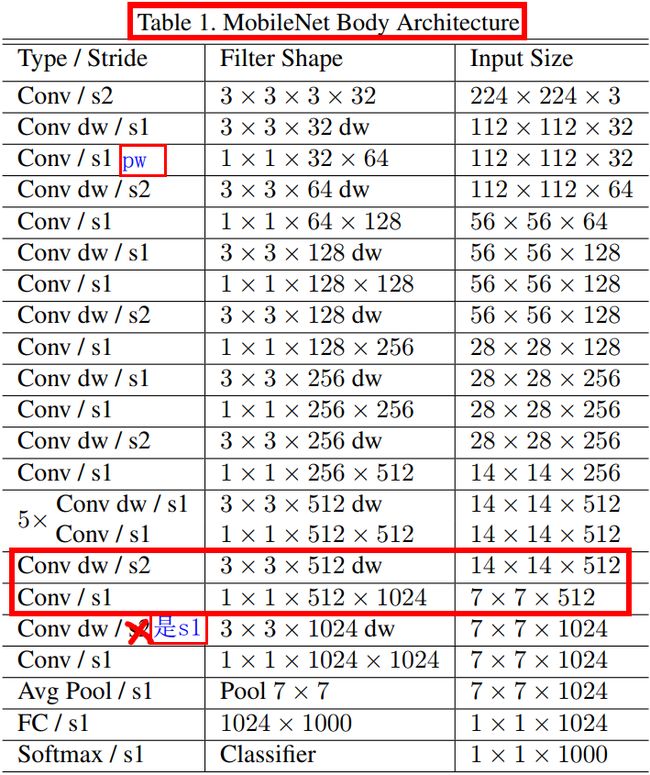
其中 α ∈ ( 0 , 1 ] \alpha \in (0,1] α∈(0,1],典型值设置为 1、0.75、0.5 和 0.25。 α = 1 \alpha = 1 α=1 是基准 MobileNet 模型, α < 1 \alpha < 1 α<1 是缩小版的 MobileNets。宽度乘数的作用是将计算量和参数数量大约减少 α 2 \alpha^2 α2 倍,从而降低了网络计算成本( computational cost of a neural network)。 宽度乘数可以应用于任何模型结构,以定义新的较小模型,且具有合理的准确性、网络延迟 latency 和模型大小之间的权衡。 它用于定义新的精简结构,需要从头开始进行训练模型。基准 MobileNet 模型的整体结构定义如表 1 所示。
2.4、分辨率乘系数-减少表示
减少模型计算成本的的第二个超参数(hyper-parameter)是分辨率因子 ρ \rho ρ,论文将其应用于输入图像,则网络的每一层 feature map 大小也要乘以 ρ \rho ρ。实际上,论文通过设置输入分辨率来隐式设置 ρ \rho ρ。
将网络核心层的计算成本表示为具有宽度乘数 α \alpha α 和分辨率乘数 ρ \rho ρ 的深度可分离卷积的公式如下:
α M × ρ D G 2 × D K 2 + α N × α M × ρ D G 2 \alpha M \times \rho D_{G}^{2} \times D_{K}^{2} + \alpha N \times \alpha M \times \rho D_{G}^{2} αM×ρDG2×DK2+αN×αM×ρDG2
其中 ρ ∈ ( 0 , 1 ] \rho \in (0,1] ρ∈(0,1],通常是隐式设置的,因此网络的输入分辨率为 224、192、160 或 128。 ρ = 1 \rho = 1 ρ=1 时是基准(baseline) MobilNet, ρ < 1 \rho < 1 ρ<1 时缩小版 MobileNets。分辨率乘数的作用是将计算量减少 ρ 2 \rho^2 ρ2。
2.5、模型结构总结
- 整个网络不算平均池化层与
softmax层,且将DW卷积和PW卷积计为单独的一层,则MobileNet有28层网络。+ 在整个网络结构中步长为2的卷积较有特点,卷积的同时充当下采样的功能; - 第一层之后的
26层都为深度可分离卷积的重复卷积操作,分为4个卷积stage; - 每一个卷积层(含常规卷积、深度卷积、逐点卷积)之后都紧跟着批规范化和
ReLU激活函数; - 最后一层全连接层不使用激活函数。
3、实验
作者分别进行了 Stanford Dogs dataset 数据集上的细粒度识别、大规模地理分类、人脸属性分类、COCO 数据集上目标检测的实验,来证明与 Inception V3、GoogleNet、VGG16 等 backbone 相比,MobilNets 模型可以在计算量(Mult-Adds)数 10 被下降的情况下,但是精度却几乎不变。
4、结论
论文提出了一种基于深度可分离卷积的新模型架构,称为 MobileNets。 在相关工作章节中,作者首先调查了一些让模型更有效的重要设计原则,然后,演示了如何通过宽度乘数和分辨率乘数来构建更小,更快的 MobileNet,通过权衡合理的精度以减少模型大小和延迟。 然后,我们将不同的 MobileNets 与流行的模型进行了比较,这些模型展示了出色的尺寸,速度和准确性特性。 最后,论文演示了 MobileNet 在应用于各种任务时的有效性。
5、基准模型代码
自己复现的基准 MobileNet v1 代模型 pytorch 代码如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision.models as models
from torch import flatten
class MobilnetV1Block(nn.Module):
"""Depthwise conv + Pointwise conv"""
def __init__(self, in_channels, out_channels, stride=1):
super(MobilnetV1Block, self).__init__()
# dw conv kernel shape is (in_channels, 1, ksize, ksize)
self.dw = nn.Sequential(
nn.Conv2d(in_channels, 64, kernel_size=3,
stride=stride, padding=1, groups=4, bias=False),
nn.BatchNorm2d(in_channels),
nn.ReLU(inplace=True)
)
# print(self.dw[0].weight.shape) # print dw conv kernel shape
self.pw = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1,
stride=1, padding=0, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
x = self.dw(x)
x = self.pw(x)
return x
def convbn_relu(in_channels, out_channels, stride=2):
return nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride,
padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True))
class MobileNetV1(nn.Module):
# (32, 64, 1) means MobilnetV1Block in_channnels is 32, out_channels is 64, no change in map size.
stage_cfg = [(32, 64, 1),
(64, 128, 2), (128, 128, 1), # stage1 conv
(128, 256, 2), (256, 256, 1), # stage2 conv
(256, 512, 2), (512, 512, 1), (512, 512, 1), (512, 512, 1), (512, 512, 1), (512, 512, 1), # stage3 conv
(512, 1024, 2), (1024, 1024, 1) # stage4 conv
]
def __init__(self, num_classes=1000):
super(MobileNetV1, self).__init__()
self.first_conv = convbn_relu(3, 32, 2) # Input image size reduced by half
self.stage_layers = self._make_layers(in_channels=32)
self.linear = nn.Linear(1024, num_classes) # 全连接层
def _make_layers(self, in_channels):
layers = []
for x in self.stage_cfg:
in_channels = x[0]
out_channels = x[1]
stride = x[2]
layers.append(MobilnetV1Block(in_channels, out_channels, stride))
in_channels = out_channels
return nn.Sequential(*layers)
def forward(self, x):
"""Feature map shape(h、w) is 224 -> 112 -> 56 -> 28 -> 14 -> 7 -> 1"""
x = self.first_conv(x)
x = self.stage_layers(x)
x = F.avg_pool2d(x, 7) # x shape is 7*7
x = flatten(x, 1) # x = x.view(x.size(0), -1)
x = self.linear(x)
return x
if __name__ == "__main__":
model = MobileNetV1()
model.eval() # set the model to inference mode
input_data = torch.rand(1, 3, 224, 224)
outputs = model(input_data)
print("Model output size is", outputs.size())
程序运行结果如下:
Model output size is torch.Size([1, 1000])
参考资料
- Group Convolution分组卷积,以及Depthwise Convolution和Global Depthwise Convolution
- 理解分组卷积和深度可分离卷积如何降低参数量
- 深度可分离卷积(Xception 与 MobileNet 的点滴)
- MobileNetV1代码实现
- Depthwise卷积与Pointwise卷积
- 【CNN结构设计】深入理解深度可分离卷积