Apollo 6.0点云检测模型的训练, 基于TensorRT和ROS的推理
Apollo6.0点云模型的训练, 基于ROS和TensorRT进行推理
三维点云目标检测
深度学习三维点云模型推理,
为啥需要学习三维点云, 因为可用很好探测三维空间,特别是自动驾驶领域越来越多,
为啥又需要深度学习三维点云,可以更好的分类,基于SVM等点云分类方法,也许只能达到80%的准确率, 深度学习只会高些;
三维点云目标检测思路之一:
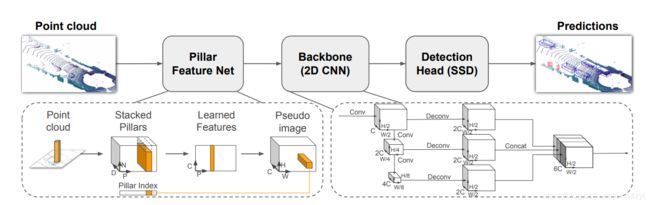
如下图所示,先进行点云编码,检测网络,后处理;
CNN包括(backbone、head、neck,loss)
那么PointPillars可如下图所示:
点云编码:前处理和点云特征学习;
检测网络:2D CNN和Head SSD;
后处理:
1: apollo检测模型简介
根据apllo6.0的代码 , 分成4步对 Lidar 核心逻辑流程进行叙述。
1.1 点云编码
a. 点云前处理, 分柱子
把俯视图分成 H × W个小方格子,再沿着z轴向上拉就成了柱体
每个网格所对应的柱子中的每一个点取:
x, 每个点的真实位置坐标
y, 每个点的真实位置坐标
z, 每个点的真实位置坐标
r, 每个点的真实反射率
x_c,点相对于柱子中心的偏差
y_c,点相对于柱子中心的偏差
z_c,点相对于柱子中心的偏差
x_p,点相对于网格中心的偏差
y_p,点相对于网格中心的偏差
但是,这样完全没有对点云进行编码,需要进一步学习
def forward(self, pillar_x, pillar_y, pillar_z, pillar_i, num_voxels, x_sub_shaped, y_sub_shaped, mask):
pillar_xyz = torch.cat((pillar_x, pillar_y, pillar_z), 1)
points_mean = pillar_xyz.sum(dim=3, keepdim=True) / num_voxels.view(1, 1, -1, 1)
f_cluster = pillar_xyz - points_mean
f_center_offset_0 = pillar_x - x_sub_shaped
f_center_offset_1 = pillar_y - y_sub_shaped
f_center_concat = torch.cat((f_center_offset_0, f_center_offset_1), 1)
pillar_xyzi = torch.cat((pillar_x, pillar_y, pillar_z, pillar_i), 1)
features_list = [pillar_xyzi, f_cluster, f_center_concat]
features = torch.cat(features_list, dim=1)
masked_features = features * mask
pillar_feature = self.pfn_layers[0](masked_features)
return pillar_feature
b. 点云前处理, 点云编码
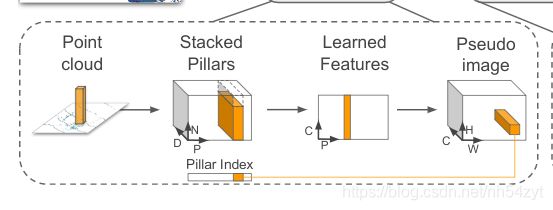
一个简化的PointNet从D维中学出C个channel来最终可以展开成一个伪图像形式,H,W为宽高,C为通道数。
前处理网络思路:
每个柱子中点多于N的进行采样,少于N的进行填充0。于是就形成了(D,P,N)D=9, N为每个pillar的采样点数(设定值),P为pillar总数目,H*W。这样点云数据就表达成了一个(D,P,N)的Tensor.然后卷积,得到一个(C,P,N)的Tensor.在N这个维度上做max operation.得到(C,P)的tensor.变形得(C,H,W)tensor.
至此,
用一个(C,H,W)的tensor完成了点云数据的表达.
也是后续检测网络的前处理部分,
同时移植TensorRT也可生成onnx模型;
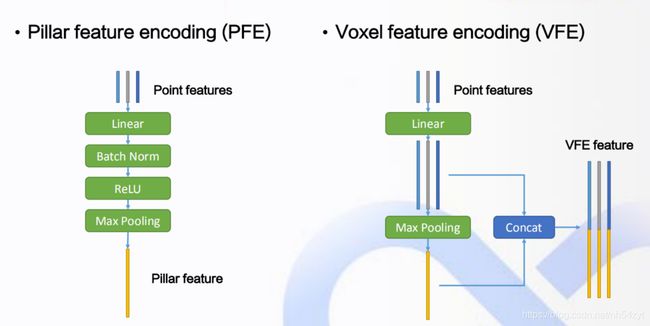
如下简化了VoxelNet的点云编码方式:
采用PFE方式
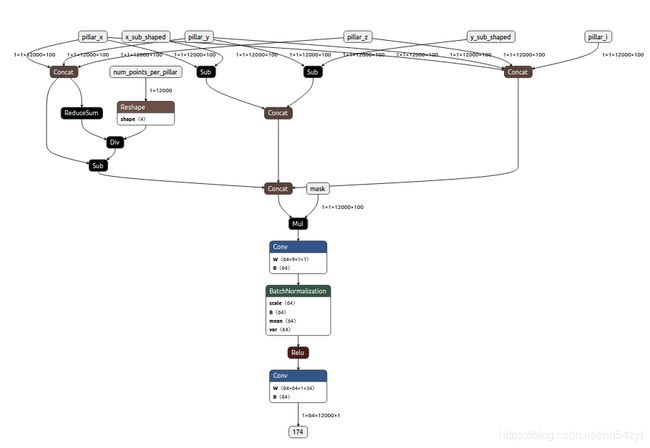
由于代码基于VoxelNet修改的,所以onnx输入为 pillar_x, pillar_y, pillar_z, pillar_i,
num_voxels, x_sub_shaped, y_sub_shaped, mask;
最后再转换为pointpillars的输入
def forward(self, pillar_x, pillar_y, pillar_z, pillar_i, num_voxels, x_sub_shaped, y_sub_shaped, mask):
pillar_xyz = torch.cat((pillar_x, pillar_y, pillar_z), 1)
points_mean = pillar_xyz.sum(dim=3, keepdim=True) / num_voxels.view(1, 1, -1, 1)
f_cluster = pillar_xyz - points_mean
f_center_offset_0 = pillar_x - x_sub_shaped
f_center_offset_1 = pillar_y - y_sub_shaped
f_center_concat = torch.cat((f_center_offset_0, f_center_offset_1), 1)
pillar_xyzi = torch.cat((pillar_x, pillar_y, pillar_z, pillar_i), 1)
features_list = [pillar_xyzi, f_cluster, f_center_concat]
features = torch.cat(features_list, dim=1)
masked_features = features * mask
pillar_feature = self.pfn_layers[0](masked_features)
return pillar_feature

class PFNLayer(nn.Module):
def __init__(self,
in_channels,
out_channels,
use_norm=True,
last_layer=False):
super().__init__()
self.name = 'PFNLayer'
self.last_vfe = last_layer
if not self.last_vfe:
out_channels = out_channels // 2
self.units = out_channels
self.in_channels = in_channels
self.linear= nn.Linear(self.in_channels, self.units, bias = False)
self.norm = nn.BatchNorm2d(self.units, eps=1e-3, momentum=0.01)
self.conv1 = nn.Conv2d(in_channels=self.in_channels, out_channels=self.units, kernel_size=1, stride=1)
self.conv2 = nn.Conv2d(in_channels=100, out_channels=1, kernel_size=1, stride=1)
self.t_conv = nn.ConvTranspose2d(100, 1, (1,8), stride=(1,7))
self.conv3 = nn.Conv2d(64, 64, kernel_size=(1, 34), stride=(1, 1), dilation=(1,3))
def forward(self, input):
x = self.conv1(input)
x = self.norm(x)
x = F.relu(x)
x = self.conv3(x)
return x
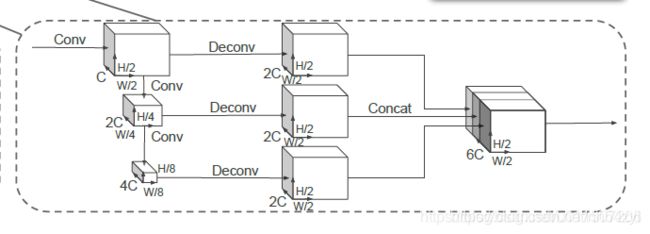
1.2 检测网络backbone和head
包含两个子网络
1、top-down网络,
2、second网络
其中top-down网络结构为了捕获不同尺度下的特征信息,主要是由卷积层、归一化、非线性层构成的。
second网络用于将不同尺度特征信息融合,主要有反卷积来实现。
经过Scatter处理,转化为1×64×496×432数据结构,再经过如下网络,最后由head进行预测
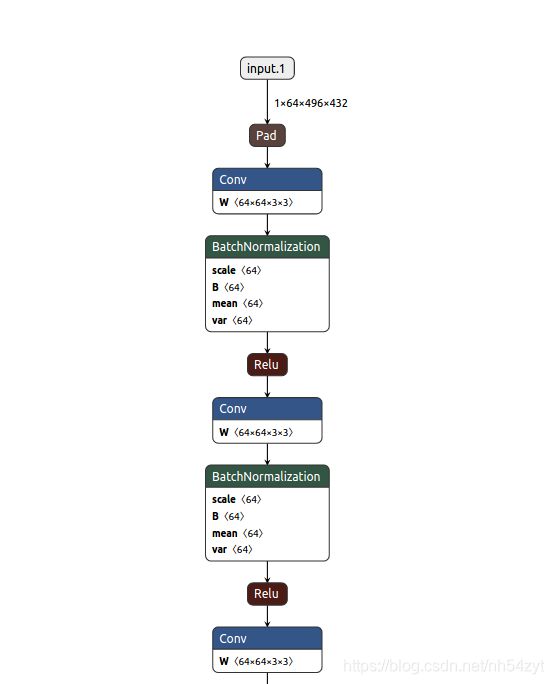
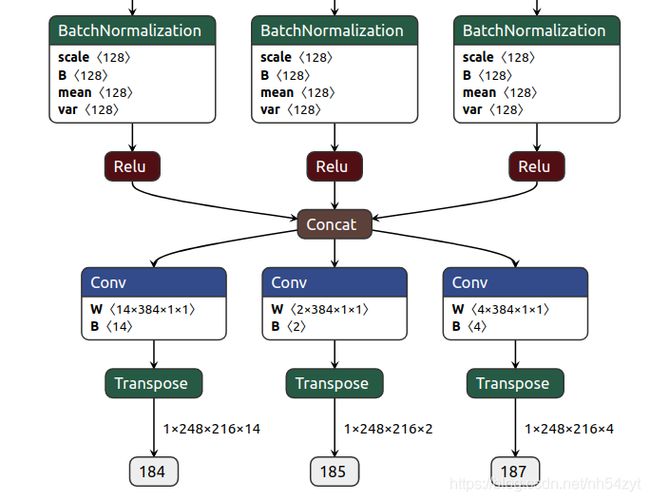
模型输出包括:
rpn_box_output, 回归损失
// boxes ([N, 7] Tensor): normal boxes: x, y, z, w, l, h, r
rpn_cls_output,分类损失
// float score = 1/(1+expf(-cls_preds[tid]));
rpn_dir_outpu,方向预测损失
由于有0°和90°两种anchor,所以7×2,1×2,2×2
t
 改进以后,multi-head
改进以后,multi-head
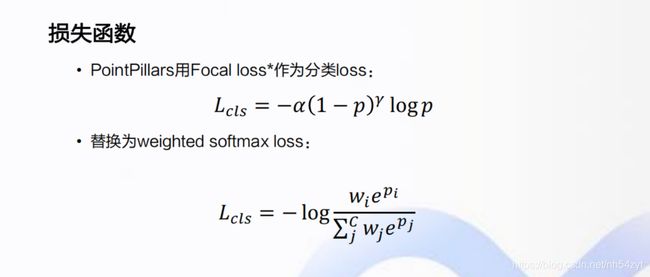
1.3 检测网络Loss
loss设计:
3d box由(x,y,z,w,l,h,theta)确定.
box由(x,y,w,h)确定, 3dbox多了一个z方向的数据,以及一个角度,用以预计3d box的朝向(绕z轴的角度).
loss由3部分组成
定位loss,衡量3d box
分类loss,衡量box内的物体类别
direction loss.定位loss虽说已经考虑了角度,但是不能区分flipped box.即比如一个3d box内的车,朝着正南和朝着正北走,标出来的3d box都是一样的.
不同于图像领域的anchor:
以voxelnet为例,需要人为设定anchor的大小,可以直接回归真实的目标大小,因此anchor也可以根据真实目标大小设定,对于每种anchor,设置了θa=0°和90°两种角度。由于目标有各种角度,因此为了得到更准确的角度回归,anchor的角度设置可以在[0°,180°)进行等间隔采样,获得更多不同角度的anchor,提高回归精度。
一个分类向量(car, pedestrian, cyclist等),
一个7维的回归向量(x, y, z, l, w, h, theta),
一个方向二分类向量用于预测的角度值跟实际方向重合还是相反
apollo/modules/perception/lidar/lib/detection/lidar_point_pillars/
2: apollo检测模型 ROS环境移植
可将代码迁移到ROS环境, 实现和视觉图像的简单融合算法,
同时订阅topic, 进行推理即可
#include void doInference(float* in_points_array)
{
preprocess(in_points_array, in_num_points);
anchor_mask_cuda_ptr_->doAnchorMaskCuda();
cudaStream_t stream;
GPU_CHECK(cudaStreamCreate(&stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[0], dev_pillar_x_, MAX_NUM_PILLARS_ * MAX_NUM_POINTS_PER_PILLAR_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[1], dev_pillar_y_, MAX_NUM_PILLARS_ * MAX_NUM_POINTS_PER_PILLAR_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[2], dev_pillar_z_, MAX_NUM_PILLARS_ * MAX_NUM_POINTS_PER_PILLAR_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[3], dev_pillar_i_, MAX_NUM_PILLARS_ * MAX_NUM_POINTS_PER_PILLAR_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[4], dev_num_points_per_pillar_, MAX_NUM_PILLARS_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[5], dev_x_coors_for_sub_shaped_, MAX_NUM_PILLARS_ * MAX_NUM_POINTS_PER_PILLAR_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[6], dev_y_coors_for_sub_shaped_, MAX_NUM_PILLARS_ * MAX_NUM_POINTS_PER_PILLAR_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
GPU_CHECK(cudaMemcpyAsync(pfe_buffers_[7], dev_pillar_feature_mask_, MAX_NUM_PILLARS_ * MAX_NUM_POINTS_PER_PILLAR_ * sizeof(float), cudaMemcpyDeviceToDevice, stream));
pfe_context_->enqueue(BATCH_SIZE_, pfe_buffers_, stream, nullptr);
*******
rpn_context_->enqueue(BATCH_SIZE_, rpn_buffers_, stream, nullptr);
postprocess_cuda_ptr_->doPostprocessCuda()
*******
}
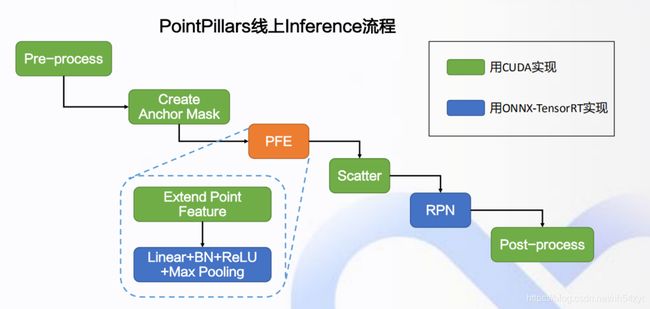
移植ROS环境,需要两个onnx模型,PFE和RPN;
如下逻辑:
3: apollo检测模型的torch环境训练
训练环境:
torch1.3.0 torchvision-0.4.1 cuda-10.0.130 python3.7
由于torch1.3.0需要cuda10.1的环境,如不安装10.1,
则按照如下方式安装环境:
wget https://download.pytorch.org/whl/cu100/torch-1.3.0%2Bcu100-cp37-cp37m-linux_x86_64.whl
wget https://download.pytorch.org/whl/cu100/torchvision-0.4.1%2Bcu100-cp37-cp37m-linux_x86_64.whl
pip install torch-1.3.0+cu100-cp36-cp36m-linux_x86_64.whl torchvision-0.4.1+cu100-cp36-cp36m-linux_x86_64.whl
>>import torch
>>print(torch.version.cuda)
>>10.0.1
a.数据集准备
可用按照kitti数据集,将每帧数据转换为bin文件
每个bin文件格式,存放点云数据个数如下
例如:x,y,z,intensity,label,x,y,z,intensity,label,x,y…
图像和激光对应文件按照如下存储:
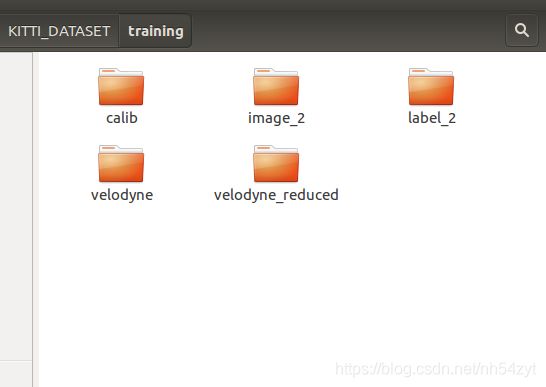
└── KITTI_DATASET_ROOT
├── training <-- train data
| ├── image_2 <-- visualization
| ├── calib
| ├── label_2
| ├── velodyne
| └── velodyne_reduced <-- empty directory
└── testing <-- test data
├── image_2 <-- visualization
├── calib
├── velodyne
└── velodyne_reduced <-- empty directory
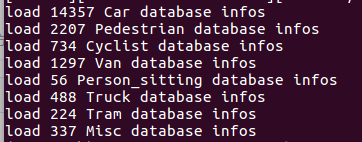
KITTI转换数据后,会打印info:
b.模型训练
参照second的方式进行
export PYTHONPATH=/home/py3torch/second.pytorch:$PYTHONPATH
转onnx
https://github.com/nutonomy/second.pytorch
训multi-object
https://github.com/traveller59/second.pytorch
pytorch模型将会生成ONNX
导出为pfe.onnx与rpn.onnx文件即可
https://github.com/traveller59/second.pytorch (second作者。额外添加了pointpillars)
https://github.com/nutonomy/second.pytorch (pointpillars的作者,继承了second的代码)
https://github.com/SmallMunich/nutonomy_pointpillars (修改了pointpillars作者代码,生成onnx)
在运行pytorch模型导出为onnx模型之前,你需要将工程second/pytorch/models/voxelnet.py
文件中的rows: 686 这行代码取消注释,让其返回voxel_features的特征;取消注释之后,下面运行如下命令:
python pytorch/train.py onnx_model_generate
–config_path= configs/pointpillars/car/xyres_16.proto --model_dir=/path/to/model_dir
//83520.tckpt
Evaluation official
Car AP(Average Precision)@0.70, 0.70, 0.70:
bbox AP:90.39, 80.90, 80.42
bev AP:90.06, 80.61, 79.29
3d AP:77.24, 66.15, 59.49
aos AP:0.89, 2.53, 3.66
Car AP(Average Precision)@0.70, 0.50, 0.50:
bbox AP:90.39, 80.90, 80.42
bev AP:90.79, 89.62, 88.97
3d AP:90.78, 89.33, 88.33
aos AP:0.89, 2.53, 3.66
Evaluation coco
Car coco AP@0.50:0.05:0.95:
bbox AP:66.47, 61.51, 60.47
bev AP:67.39, 63.02, 60.89
3d AP:52.20, 47.21, 45.51
aos AP:0.63, 2.07, 2.98
def forward(self, example):
"""module's forward should always accept dict and return loss.
"""
# training input [0:pillar_x, 1:pillar_y, 2:pillar_z, 3:pillar_i,
# 4:num_points_per_pillar, 5:x_sub_shaped, 6:y_sub_shaped, 7:mask, 8:coors
# 9:anchors, 10:labels, 11:reg_targets]
pillar_x = example[0]
pillar_y = example[1]
pillar_z = example[2]
pillar_i = example[3]
num_points = example[4]
x_sub_shaped = example[5]
y_sub_shaped = example[6]
mask = example[7]
voxel_features = self.voxel_feature_extractor(pillar_x, pillar_y, pillar_z, pillar_i,
num_points, x_sub_shaped, y_sub_shaped, mask) def forward(self, example):
"""module's forward should always accept dict and return loss.
"""
# training input [0:pillar_x, 1:pillar_y, 2:pillar_z, 3:pillar_i,
# 4:num_points_per_pillar, 5:x_sub_shaped, 6:y_sub_shaped, 7:mask, 8:coors
# 9:anchors, 10:labels, 11:reg_targets]
pillar_x = example[0]
pillar_y = example[1]
pillar_z = example[2]
pillar_i = example[3]
num_points = example[4]
x_sub_shaped = example[5]
y_sub_shaped = example[6]
mask = example[7]
voxel_features = self.voxel_feature_extractor(pillar_x, pillar_y, pillar_z, pillar_i,
num_points, x_sub_shaped, y_sub_shaped, mask)
return voxel_features ### onnx voxel_features export
# return voxel_features ### onnx voxel_features export
# middle_feature_extractor for trim shape
voxel_features = voxel_features.squeeze()
voxel_features = voxel_features.permute(1, 0)
coors = example[8]
spatial_features = self.middle_feature_extractor(voxel_features, coors)
# spatial_features input size is : [1, 64, 496, 432]
preds_dict = self.rpn(spatial_features)
# return preds_dict
box_preds = preds_dict[0]
cls_preds = preds_dict[1]
if self.training:
#labels = example['labels']
#reg_targets = example['reg_targets']
anchors = example[9]
labels = example[10]
reg_targets = example[11]
batch_size_dev = anchors.shape[0]
cls_weights, reg_weights, cared = prepare_loss_weights(
labels,
pos_cls_weight=self._pos_cls_weight,
neg_cls_weight=self._neg_cls_weight,
loss_norm_type=self._loss_norm_type,
dtype=pillar_x.dtype) # voxels.dtype
cls_targets = labels * cared.type_as(labels)
cls_targets = cls_targets.unsqueeze(-1)
自训练检测模型及效果
本次方法是基于Apollo6.0 分割模型进行复现,
如需要完整训练和推理代码,
可留言沟通,一起交流学习 !
kittiviewer设置如下:
python ./kittiviewer/backend/main.py main
python -m http.server
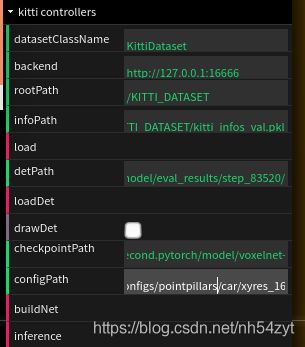
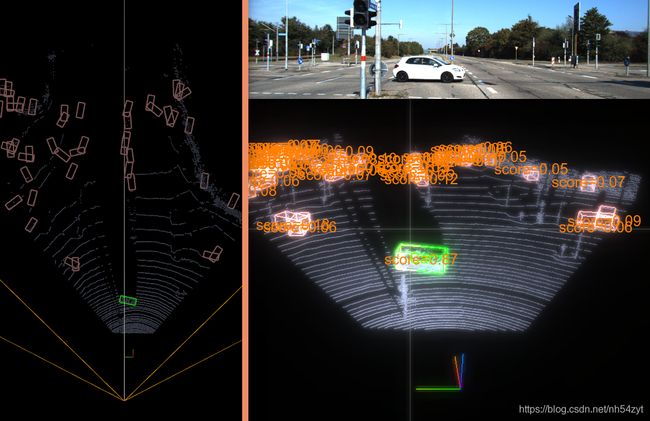
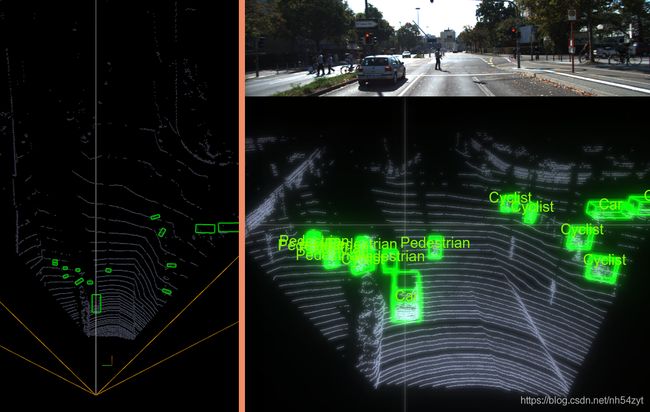
KITTI效果如下:
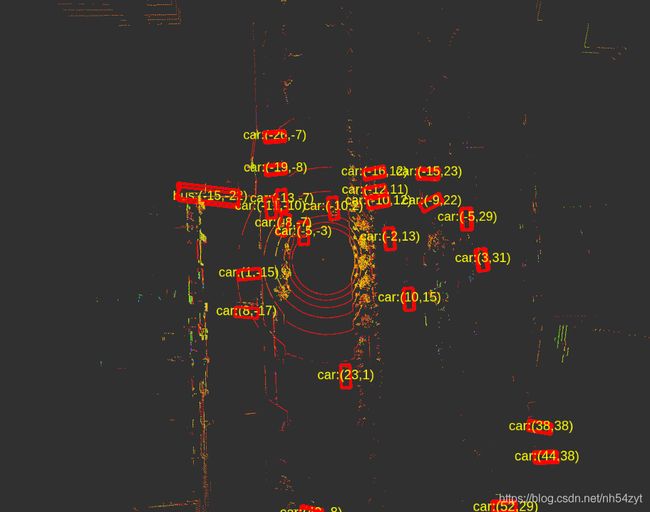
16线velodyne效果如下:
另一篇blog
https://blog.csdn.net/nh54zyt/article/details/110671838
如上链接可查看Apollo3.0
点云分割模型详细训练方法,
及TensorRT,和ROS环境的部署.
https://github.com/traveller59/second.pytorch
(second作者。添加了pointpillars)https://github.com/nutonomy/second.pytorch
(pointpillars的作者,继承了second的代码)https://github.com/SmallMunich/nutonomy_pointpillars
(修改了pointpillars作者代码,生成onnx)