ORB点特征、LSD线特征、线特征参数化求导学习总结
目录
1 ORB特征点
LSD特征线
什么是图像的线特征
什么是梯度算子(也叫一阶差分算子)
如何利用算子进行边缘提取(通过卷积,什么是卷积?)
三种一阶差分算子
1. Roberts算子
2.Sobel算子
3.Prewitt算子
二阶差分算子
1.拉普拉斯算子(Laplace)
3.Canny算子
计算机视觉中Canny算子详解_计算机秃头选手的博客-CSDN博客_canny算子
LSD线特征提取参考博客
SLAM中线特征的参数化和求导
矩阵奇异值与矩阵范数之间有什么联系?
我们要知道三维空间中的点在图像中的位置,就需要提取特征与特征匹配了。
1 ORB特征点
提取步骤:1.检测特征点 2.计算描述子 3.特征匹配
1.检测特征点
ORB用到的检测特征点的方法是Oriented FAST算法,最大的特点就是快!
算法原理:
①遍历图像,找到所有的角点。
②例如只拿到一个角点p,设其像素灰度值为I,取这个角点以三为半径的圆上的所有像素点,能取到16个,
③然后设定一个阈值t,如果连续n个像素点的灰度值都大于I+t或者都小于I-t。我们则认为其为特征点。
④接着计算方向:特征点与重心的角度。
2.计算描述子
描述子我们可以理解为在每一个特征点旁边有一个向量,或者说也可以理解为数组,记录着特征点周围的信息。这里用的事BRIEF描述子。BRIEF描述子是一个二进制描述子,就是在特征点周围随机取128对点对或者是256对点对p和q,若p大于q,则记为1,否则记为0。这就组成了一个128个数的[0,1,1,0.....]序列。
3.特征匹配
此时我们得到了所有的特征点和描述子。此时进行暴力匹配,对图1中的每一个特征点分别和图像2中的特征点的描述子比较,我们用Hamming距离来度量两个描述子的相似程度,如果Hamming距离小于两倍的最小距离则认为匹配正确,否则认为匹配错误。
#include
#include
#include
#include
using namespace std;
using namespace cv;
int main ( int argc, char** argv )
{
if ( argc != 3 )
{
cout<<"usage: feature_extraction img1 img2"< keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
Ptr detector = ORB::create();
Ptr descriptor = ORB::create();
Ptr matcher = DescriptorMatcher::create ( "BruteForce-Hamming" );
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect ( img_1,keypoints_1 );
detector->detect ( img_2,keypoints_2 );
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute ( img_1, keypoints_1, descriptors_1 );
descriptor->compute ( img_2, keypoints_2, descriptors_2 );
Mat outimg1;
drawKeypoints( img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
imshow("ORB特征点",outimg1);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
vector matches;//matches存储特征点信息
matcher->match ( descriptors_1, descriptors_2, matches );
//-- 第四步:匹配点对筛选
double min_dist=10000, max_dist=0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for ( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if ( dist < min_dist ) min_dist = dist;
if ( dist > max_dist ) max_dist = dist;
}
printf ( "-- Max dist : %f \n", max_dist );
printf ( "-- Min dist : %f \n", min_dist );
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
std::vector< DMatch > good_matches;
for ( int i = 0; i < descriptors_1.rows; i++ )
{
if ( matches[i].distance <= max ( 2*min_dist, 30.0 ) )
{
good_matches.push_back ( matches[i] );
}
}
//-- 第五步:绘制匹配结果
Mat img_match;
Mat img_goodmatch;
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, matches, img_match );
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch );
imshow ( "所有匹配点对", img_match );
imshow ( "优化后匹配点对", img_goodmatch );
waitKey(0);
return 0;
} LSD特征线
什么是图像的线特征
①影像的边缘或线认为是图像的线特征;
②“边缘”可定义为影像局部区域特征不相同的那些区域间的 分界线,
③而“线”则可以认为是具有很小宽度的其中间区域 具有相同的影像特征的边缘对线特征提取的应用
1.房屋提取
2.道路提取
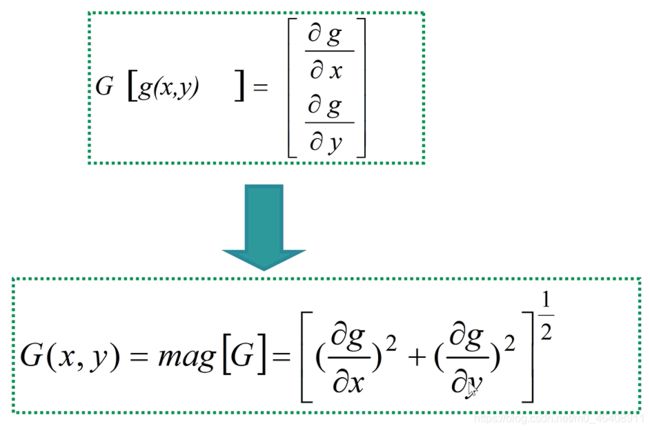
什么是梯度算子(也叫一阶差分算子)
g(x,y)为图像某点处的灰度值;梯度算子即为对x,y方向求偏导数(如何对数字影像求导数请参见该文章前些部分的介绍影像的导数
如何利用算子进行边缘提取(通过卷积,什么是卷积?)
以sobel算子为例学习一下如何进行卷积
三种一阶差分算子
1. Roberts算子

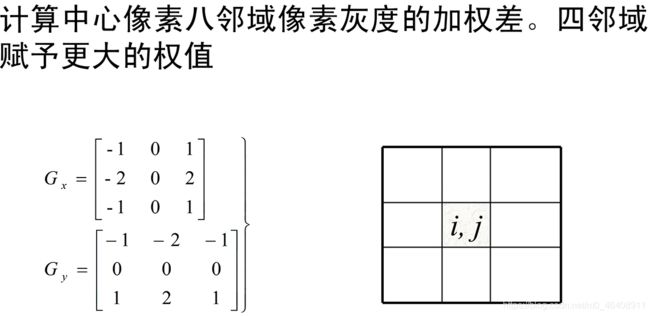
2.Sobel算子
计算中心像素八领域像素灰度的加权差,四领域赋予更大的权值。
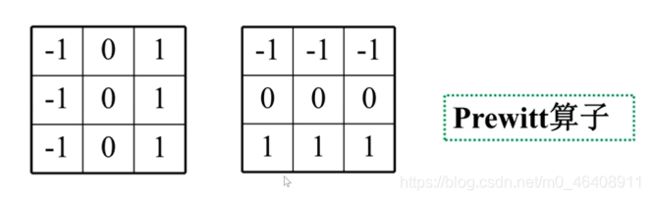
3.Prewitt算子
与Sobel算子模板类似
二阶差分算子
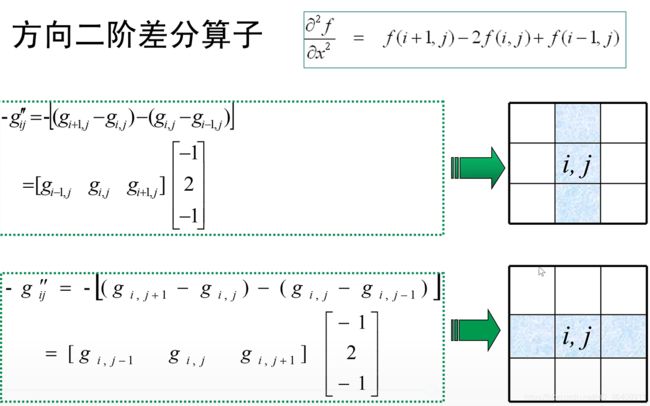
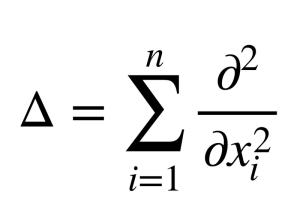
1.拉普拉斯算子(Laplace)
在数学以及物理中,拉普拉斯算子或是拉普拉斯算符(英语:Laplace operator, Laplacian)是由欧几里得空间中的一个函数的梯度的散度给出的微分算子,通常写成 、
、
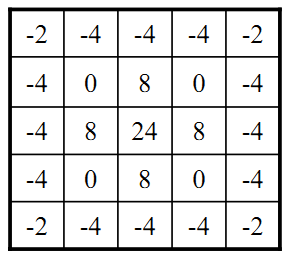
2.高斯-拉普拉斯算子(LOG)
LoG算子也就是 Laplace of Gaussian function(高斯拉普拉斯函数)。常用于数字图像的边缘提取和二值化。LOG 算子源于D.Marr计算视觉理论中提出的边缘提取思想, 即首先对原始图像进行最佳平滑处理, 最大程度地抑制噪声, 再对平滑后的图像求取边缘。
常用的LoG算子是5×5的模板,高斯拉普拉斯函数:
3.Canny算子
通常情况下边缘检测的目的是在保留原有图像属性的情况下,显著减少图像的数据规模。有多种算法可以进行边缘检测,虽然Canny算法年代久远,但可以说它是边缘检测的一种标准算法,而且仍在研究中广泛使用。
Canny的实现步骤
①应用高斯滤波来平滑图像,目的是去除噪声
②找寻图像的强度梯度(intensity gradients)
③应用非最大抑制(non-maximum suppression)技术来消除边误检(本来不是但检测出来是)
④应用双阈值的方法来决定可能的(潜在的)边界
⑤利用滞后技术来跟踪边界
计算机视觉中Canny算子详解_计算机秃头选手的博客-CSDN博客_canny算子
LSD线特征提取参考博客
论文笔记-LSD: a Line Segment Detector线特征提取_wrotcat的博客-CSDN博客_lsd线特征提取
SLAM中线特征的参数化和求导
众所周知,线特征比点特征可以提供更多的约束条件,并且在某些场合下比点特征要鲁棒。但是如果我们想要把线特征加入到SLAM系统中面临的是参数化和优化求导。
下面我们就来详细介绍一下空间直线的两种参数化方法:①Plücker参数化方法,②直线正交表示方法。为什么需要两种参数化方法呢?因为空间中的直线有4个自由度,而Plücker参数化方法需要使用6个参数表示直线,这样就会导致过参数化,过参数化在优化的时候就需要采用带约束的优化,不太方便。于是引入了可以用4个参数更新直线的正交表示来方便优化。这两种参数化方法可以很方便的相互转换,所以我们可以在SLAM系统中同时使用这两种参数化形式,在初始化和进行空间变换的时候使用Plücker坐标,在优化的时候使用正交表示。下面我们就来详细了解这两种参数化方法和优化的雅克比求导。
1、Plücker参数化方法
普吕克坐标法线特征参数化详见SLAM中线特征的参数化和求导 - 知乎
矩阵奇异值与矩阵范数之间有什么联系?
首先可以定义欧式空间 的向量x的范数
的向量x的范数![]() ,同时基于每一种向量范数,可以相应地定义
,同时基于每一种向量范数,可以相应地定义![]() 矩阵A的范数为
矩阵A的范数为
![]()
向量的范数存在多种定义方式,最常见的是2范数,也就是欧式空间的长度:
![]()
那么相应的矩阵A的范数即为当![]() 时,函数
时,函数![]() 的最大值。
的最大值。
注意 是对称非负定矩阵,特征值满足
是对称非负定矩阵,特征值满足![]() ,相应的特征向量
,相应的特征向量 构成的一组标准正交基,那么设
构成的一组标准正交基,那么设

根据![]() 知道有
知道有

于是

可知![]() ,即的最大特征值的平方根,即A的最大奇异值。
,即的最大特征值的平方根,即A的最大奇异值。
参考文献
数字摄影测量之线特征提取算子——有差分算子、拉普拉斯算子、LOG算子_琳噶酱ざ的博客-CSDN博客_特征提取拉普拉斯算子
ORB-SLAM2代码实现之灰度质心法学习记录_weixin_46427781的博客-CSDN博客_灰度质心法
计算机视觉中Canny算子详解_计算机秃头选手的博客-CSDN博客_canny算子
SLAM中线特征的参数化和求导 - 知乎
点线结合 PL-VINS :线特征提取(feature-tracker) 代码整理笔记_长夜临光的博客-CSDN博客_线特征提取