PicoDet网络结构在YOLOv5-Lite上的复现
点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达
![]()
作者丨陈TEL
来源丨GiantPandaCV
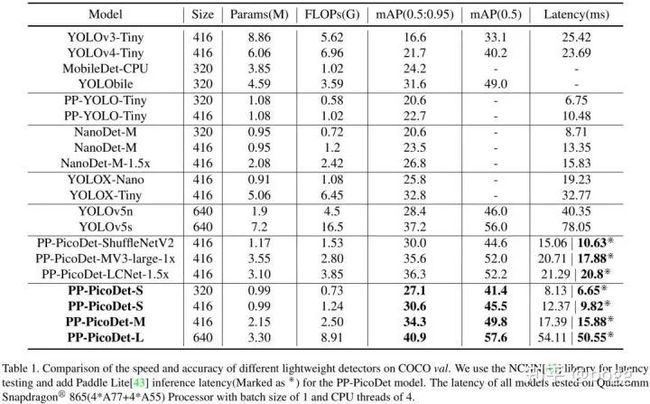
这篇博客仅对PicoDet的网络结构进行复现。PicoDet在一定程度上刷新了业界轻量级移动端模型的sota,这也是我比较感兴趣的地方。本文将PicoDet模型网络结构迁移到yolov5的平台,因为是anchor base的形式,在性能上与原生模型可能有一定的差异,以下是原生模型的性能指标。
一、PicoDet介绍
Picodet论文在11月放出,后面对模型结构进行了复现,但因为没有显卡,迟迟无法对复现后的模型进行效果检验(现在依旧没有显卡可以跑模型,遂放出代码),这个周末有空,把之前的代码翻出来整理一下,并讲述下复现的思路:
1.1 ESNet
ESNet全称为Enhance ShuffleNet,是基于旷视的shufflenetv2演变而来(下图)
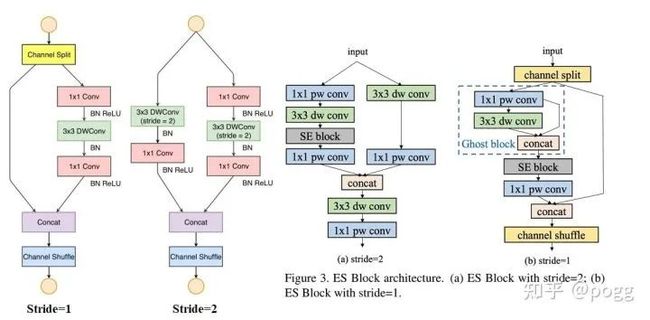 左为shuffle block,右为es_bottleneck
左为shuffle block,右为es_bottleneck
对于Stride=2,我们可以看到,ESNet和Shufflenetv2的差别是剔除了channel shuffle,增加了一个3x3的depthwise separable conv,除此之外,在其中一条branch中增加了se module;
对于Stride=1,应该是ESNet改动最大的地方,包含depthwise separable conv+point conv的branch变成了一个ghost conv+se module+point conv,这个需要稍加注意,channel稍微对不齐会导致concat和channel shuffle出错。
我们可以安装不同的branch和各种模块拆分出来进行讲解:
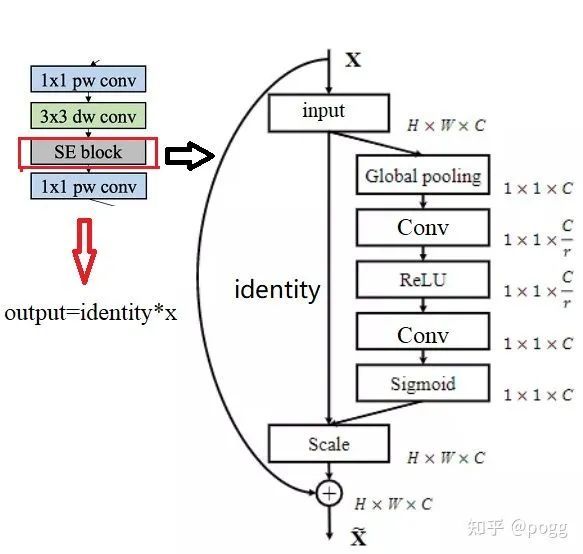
首先是注意力机制SE模块,可以参考mobile系列,激活函数选择hard_sigmoid:
复现代码:
class ES_SEModule(nn.Module):
def __init__(self, channel, reduction=4):
super().__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.conv1 = nn.Conv2d(
in_channels=channel,
out_channels=channel // reduction,
kernel_size=1,
stride=1,
padding=0)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(
in_channels=channel // reduction,
out_channels=channel,
kernel_size=1,
stride=1,
padding=0)
self.hardsigmoid = nn.Hardsigmoid()对于Ghost Block,相比于传统的卷积,GhostNet分两步走,首先GhostNet采用正常的卷积计算,得到channel较少的特征图,然后利用cheap operation得到更多的特征图,然后将不同的特征图concat到一起,组合成新的output.

代码:
class GhostConv(nn.Module):
# 代码源于yolov5.common.py
def __init__(self, c1, c2, k=3, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
super().__init__()
c_ = c2 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, s, None, g, act)
self.cv2 = Conv(c_, c_, k, s, None, c_, act)
def forward(self, x):
y = self.cv1(x)
return torch.cat((y, self.cv2(y)), dim=1)对于stride=2,branch1是常见的depthwise separable conv:

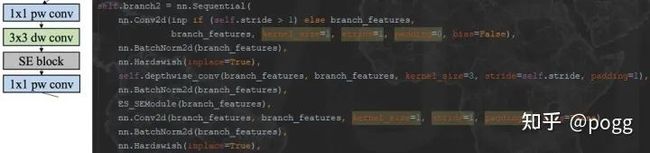
另一边的branch2结构是point conv+se module+depthwise separable conv:
branch4结构是对concat后的branch1和branch2做深度可分离卷积操作:

将这些模块组合起来,构成stride=2的总分支:
def forward(self, x):
x1 = torch.cat((self.branch1(x), self.branch2(x)), dim=1)
out = self.branch4(x1)branch3结构组合模块比较多,即ghost conv+identity+se module+point conv:

将这些模块组合起来,构成stride=1的总分支:
def forward(self, x):
x1, x2 = x.chunk(2, dim=1)
# 先进行channel split,打乱tensor
x3 = torch.cat((x1, self.branch3(x2)), dim=1)
# 进行branck3的操作
out = channel_shuffle(x3, 2)
# 将操作后的tensor重新组装起来我们可以绘图分析下tensor的走向,以最复杂的Stride=1为例:

复现代码如下:
# build ES_Bottleneck
# -------------------------------------------------------------------------
class GhostConv(nn.Module):
# Ghost Convolution https://github.com/huawei-noah/ghostnet
def __init__(self, c1, c2, k=3, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
super().__init__()
c_ = c2 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, s, None, g, act)
self.cv2 = Conv(c_, c_, k, s, None, c_, act)
def forward(self, x):
y = self.cv1(x)
return torch.cat((y, self.cv2(y)), dim=1)
class ES_SEModule(nn.Module):
def __init__(self, channel, reduction=4):
super().__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.conv1 = nn.Conv2d(
in_channels=channel,
out_channels=channel // reduction,
kernel_size=1,
stride=1,
padding=0)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(
in_channels=channel // reduction,
out_channels=channel,
kernel_size=1,
stride=1,
padding=0)
self.hardsigmoid = nn.Hardsigmoid()
def forward(self, x):
identity = x
x = self.avg_pool(x)
x = self.conv1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.hardsigmoid(x)
out = identity * x
return out
class ES_Bottleneck(nn.Module):
def __init__(self, inp, oup, stride):
super(ES_Bottleneck, self).__init__()
if not (1 <= stride <= 3):
raise ValueError('illegal stride value')
self.stride = stride
branch_features = oup // 2
# assert (self.stride != 1) or (inp == branch_features << 1)
if self.stride > 1:
# 第一条branch分支,用于stride=2的ES_Bottleneck
self.branch1 = nn.Sequential(
self.depthwise_conv(inp, inp, kernel_size=3, stride=self.stride, padding=1),
nn.BatchNorm2d(inp),
nn.Conv2d(inp, branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.Hardswish(inplace=True),
)
self.branch2 = nn.Sequential(
# 第一二条branch分支,用于stride=2的ES_Bottleneck
nn.Conv2d(inp if (self.stride > 1) else branch_features,
branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.ReLU(inplace=True),
self.depthwise_conv(branch_features, branch_features, kernel_size=3, stride=self.stride, padding=1),
nn.BatchNorm2d(branch_features),
ES_SEModule(branch_features),
nn.Conv2d(branch_features, branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.Hardswish(inplace=True),
)
self.branch3 = nn.Sequential(
# 第三条branch分支,用于stride=1的ES_Bottleneck
GhostConv(branch_features, branch_features, 3, 1),
ES_SEModule(branch_features),
nn.Conv2d(branch_features, branch_features, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(branch_features),
nn.Hardswish(inplace=True),
)
self.branch4 = nn.Sequential(
# 第四条branch分支,用于stride=2的ES_Bottleneck的最后一次深度可分离卷积
self.depthwise_conv(oup, oup, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(oup),
nn.Conv2d(oup, oup, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(oup),
nn.Hardswish(inplace=True),
)
@staticmethod
def depthwise_conv(i, o, kernel_size=3, stride=1, padding=0, bias=False):
return nn.Conv2d(i, o, kernel_size, stride, padding, bias=bias, groups=i)
@staticmethod
def conv1x1(i, o, kernel_size=1, stride=1, padding=0, bias=False):
return nn.Conv2d(i, o, kernel_size, stride, padding, bias=bias)
def forward(self, x):
if self.stride == 1:
x1, x2 = x.chunk(2, dim=1)
x3 = torch.cat((x1, self.branch3(x2)), dim=1)
out = channel_shuffle(x3, 2)
elif self.stride == 2:
x1 = torch.cat((self.branch1(x), self.branch2(x)), dim=1)
out = self.branch4(x1)
return out
# ES_Bottleneck end
# -------------------------------------------------------------------------1.1 CSP - PAN
neck部分相对比较简单,主要op由depthwise separable conv + CSPNet + PANet组成
 在这里插入图片描述
在这里插入图片描述
CSP - PAN的yaml构建:
# CSP-PAN
head:
[ [ -1, 1, Conv, [ 232, 1, 1 ] ], # 7
[ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4
[ -1, 1, BottleneckCSP, [ 232, False ] ], # 9 (P3/8-small)
[ -1, 1, Conv, [ 116, 1, 1 ] ], # 10
[ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
[ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P4
[ -1, 1, BottleneckCSP, [ 116, False ] ], # 13
[ -1, 1, Conv, [ 116, 1, 1 ] ], # 14
[ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ],
[ [ -1, 2 ], 1, Concat, [ 1 ] ], # cat backbone P3
[ -1, 1, BottleneckCSP, [ 116, False ] ], # 17 (P3/8-small)
[-1, 1, DWConvblock, [ 116, 5, 2 ]], # 18
[ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P4
[ -1, 1, BottleneckCSP, [ 116, False ] ], # 20 (P4/16-medium)
[ -1, 1, DWConvblock, [ 232, 5, 2 ] ],
[ [ -1, 10 ], 1, Concat, [ 1 ] ], # cat head P5
[ -1, 1, BottleneckCSP, [ 232, False ] ], # 23 (P5/32-large)
[ [ -1, 7 ], 1, Concat, [ 1 ] ], # cat head P6
[ -1, 1, DWConvblock, [ 464, 5, 2 ] ], # 26 (P5/32-large)
[ [ 17, 20, 23, 25 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5, P6)
]总的模型结构以及640x640下的param和Flops:
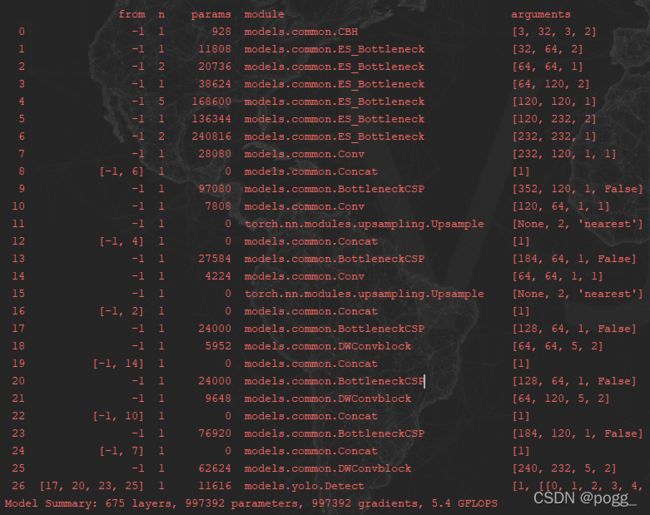 在这里插入图片描述
在这里插入图片描述
代码将更新于个人repo,欢迎大家star和白嫖!
https://github.com/ppogg/YOLOv5-Lite
本文仅做学术分享,如有侵权,请联系删文。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~