李沐动手学深度学习第四章-4.4模型选择、欠拟合和过拟合
如何发现可以泛化的模式是机器学习的根本问题。
1. 训练误差和泛化误差
训练误差(training error)是指模型在训练数据集上计算得到的误差。 泛化误差(generalization error)是指, 模型应用在同样从原始样本的分布中抽取的无限多数据样本时,模型误差的期望。
考虑对掷硬币的结果(类别0:正面,类别1:反面)进行分类的问题。 假设硬币是公平的,无论我们想出什么算法,泛化误差始终是1/2。 然而,对于大多数算法,我们应该期望训练误差会更低(取决于运气)。 考虑数据集{0,1,1,1,0,1}。 我们的算法不需要额外的特征,将倾向于总是预测多数类, 从我们有限的样本来看,它似乎是1占主流。 在这种情况下,总是预测类1的模型将产生1/3的误差, 这比我们的泛化误差要好得多。 当我们逐渐增加数据量,正面比例明显偏离1/2的可能性将会降低, 我们的训练误差将与泛化误差相匹配。
1.1. 统计学习理论
我们假设训练数据和测试数据都是从相同的分布中独立提取的。 这通常被称为独立同分布假设(i.i.d. assumption), 这意味着对数据进行采样的过程没有进行“记忆”。 换句话说,抽取的第2个样本和第3个样本的相关性, 并不比抽取的第2个样本和第200万个样本的相关性更强。
在接下来的章节中,我们将讨论因违背独立同分布假设而引起的问题。 目前,即使认为独立同分布假设是理所当然的,理解泛化性也是一个困难的问题。
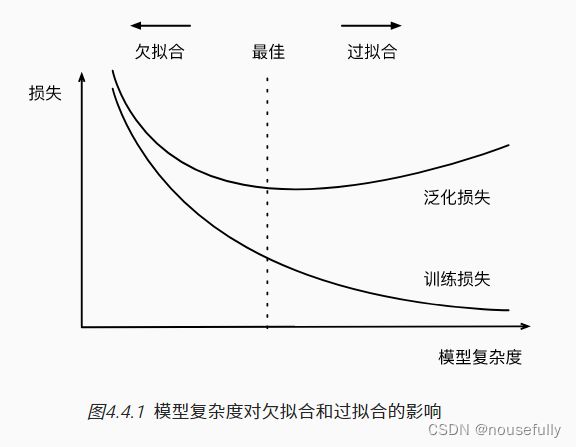
1.2. 模型复杂性
当我们有简单的模型和大量的数据时,我们期望泛化误差与训练误差相近。 当我们有更复杂的模型和更少的样本时,我们预计训练误差会下降,但泛化误差会增大。
我们将重点介绍几个倾向于影响模型泛化的因素:
-
可调整参数的数量。当可调整参数的数量(有时称为自由度)很大时,模型往往更容易过拟合。
-
参数采用的值。当权重的取值范围较大时,模型可能更容易过拟合。
-
训练样本的数量。即使你的模型很简单,也很容易过拟合只包含一两个样本的数据集。而过拟合一个有数百万个样本的数据集则需要一个极其灵活的模型。
2. 模型选择
训练多层感知机模型时,我们可能希望比较具有 不同数量的隐藏层、不同数量的隐藏单元以及不同的激活函数组合的模型。 为了确定候选模型中的最佳模型,我们通常会使用验证集。
2.2. K折交叉验证
原始训练数据被分成K个不重叠的子集。 然后执行K次模型训练和验证,每次在K−1个子集上进行训练, 并在剩余的一个子集(在该轮中没有用于训练的子集)上进行验证。 最后,通过对K次实验的结果取平均来估计训练和验证误差。
3. 欠拟合还是过拟合
3.1. 模型复杂性
3.2. 数据集大小
训练数据集中的样本越少,我们就越有可能(且更严重地)过拟合。 随着训练数据量的增加,泛化误差通常会减小。
4. 多项式回归
import math
import numpy as np
import torch
from torch import nn
from d2l import torch as d2l4.1. 生成数据集
给定x,我们将使用以下三阶多项式来生成训练和测试数据的标签:

噪声项ϵ服从均值为0且标准差为0.1的正态分布。 在优化的过程中,我们通常希望避免非常大的梯度值或损失值。 这就是我们将特征从 xi 调整为 xi / i! 的原因, 这样可以避免很大的i带来的特别大的指数值。 我们将为训练集和测试集各生成100个样本。
max_degree = 20 # 多项式的最大阶数
n_train, n_test = 100, 100 # 训练和测试数据集大小
true_w = np.zeros(max_degree) # 分配大量的空间
true_w[0:4] = np.array([5, 1.2, -3.4, 5.6])
features = np.random.normal(size=(n_train + n_test, 1))
np.random.shuffle(features)
poly_features = np.power(features, np.arange(max_degree).reshape(1, -1))
for i in range(max_degree):
poly_features[:, i] /= math.gamma(i + 1) # gamma(n)=(n-1)!
# labels的维度:(n_train+n_test,)
labels = np.dot(poly_features, true_w)
labels += np.random.normal(scale=0.1, size=labels.shape)同样,存储在poly_features中的单项式由gamma函数重新缩放, 其中Γ(n)=(n−1)!。 从生成的数据集中查看一下前2个样本, 第一个值是与偏置相对应的常量特征。
# NumPy ndarray转换为tensor
true_w, features, poly_features, labels = [torch.tensor(x, dtype=
torch.float32) for x in [true_w, features, poly_features, labels]]
features[:2], poly_features[:2, :], labels[:2]4.2. 对模型进行训练和测试
让我们实现一个函数来评估模型在给定数据集上的损失:
def evaluate_loss(net, data_iter, loss): #@save
"""评估给定数据集上模型的损失"""
metric = d2l.Accumulator(2) # 损失的总和,样本数量
for X, y in data_iter:
out = net(X)
y = y.reshape(out.shape)
l = loss(out, y)
metric.add(l.sum(), l.numel())
return metric[0] / metric[1]现在定义训练函数:
def train(train_features, test_features, train_labels, test_labels,
num_epochs=400):
loss = nn.MSELoss(reduction='none')
input_shape = train_features.shape[-1]
# 不设置偏置,因为我们已经在多项式中实现了它
net = nn.Sequential(nn.Linear(input_shape, 1, bias=False))
batch_size = min(10, train_labels.shape[0])
train_iter = d2l.load_array((train_features, train_labels.reshape(-1,1)),
batch_size)
test_iter = d2l.load_array((test_features, test_labels.reshape(-1,1)),
batch_size, is_train=False)
trainer = torch.optim.SGD(net.parameters(), lr=0.01)
animator = d2l.Animator(xlabel='epoch', ylabel='loss', yscale='log',
xlim=[1, num_epochs], ylim=[1e-3, 1e2],
legend=['train', 'test'])
for epoch in range(num_epochs):
d2l.train_epoch_ch3(net, train_iter, loss, trainer)
if epoch == 0 or (epoch + 1) % 20 == 0:
animator.add(epoch + 1, (evaluate_loss(net, train_iter, loss),
evaluate_loss(net, test_iter, loss)))
print('weight:', net[0].weight.data.numpy())4.3. 三阶多项式函数拟合(正常)
将首先使用三阶多项式函数,它与数据生成函数的阶数相同。
# 从多项式特征中选择前4个维度,即1,x,x^2/2!,x^3/3!
train(poly_features[:n_train, :4], poly_features[n_train:, :4],
labels[:n_train], labels[n_train:])
4.4. 线性函数拟合(欠拟合)
再看看线性函数拟合
# 从多项式特征中选择前2个维度,即1和x
train(poly_features[:n_train, :2], poly_features[n_train:, :2],
labels[:n_train], labels[n_train:])
4.5. 高阶多项式函数拟合(过拟合)
现在,让我们尝试使用一个阶数过高的多项式来训练模型。
# 从多项式特征中选取所有维度
train(poly_features[:n_train, :], poly_features[n_train:, :],
labels[:n_train], labels[n_train:], num_epochs=1500)
接下来继续讨论过拟合问题和处理这些问题的方法,例如权重衰减和dropout。