一定把vslam拿下!!!-Ch2刚体运动(小白版)
一定把vslam拿下!!!(小白版)// 部分内容转载自他人博客!侵删
深蓝学院视觉十四讲课后作业——ch2 刚体运动
本文记录了学习的部分笔记心得与课后习题 主要用途为学习巩固、方便自己查阅
部分内容参阅互联网或者书籍知识,部分图片来自网络,欢迎批评指正
如有问题,可及时与我沟通讨论!
*熟悉 Eigen 矩阵运算 (2 分,约 2 小时)
Eigen(http://eigen.tuxfamily.org)是常用的 C++ 矩阵运算库,具有很高的运算效率。大部分
需要在 C++ 中使用矩阵运算的库,都会选用 Eigen 作为基本代数库,例如 Google Tensorflow,Google
Ceres,GTSAM 等。本次习题,你需要使用 Eigen 库,编写程序,求解一个线性方程组。为此,你需要先
了解一些有关线性方程组数值解法的原理。
设线性方程 Ax = b,在 A 为方阵的前提下,请回答以下问题:
-
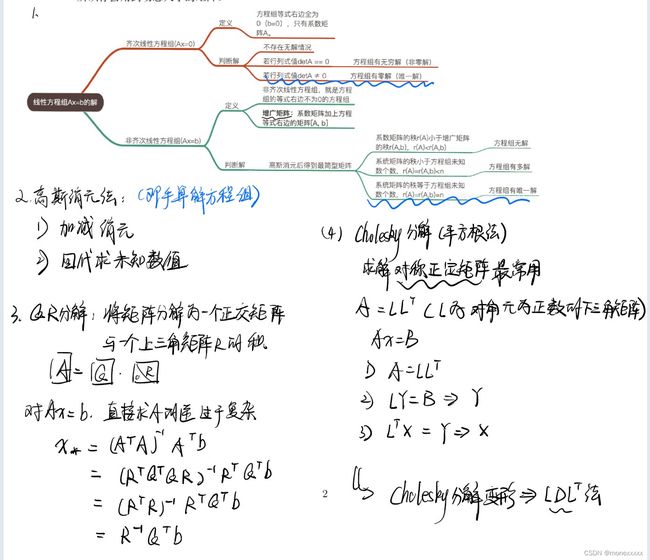
在什么条件下,x 有解且唯一?
-
高斯消元法的原理是什么?
-
QR 分解的原理是什么?
-
Cholesky 分解的原理是什么?
-
编程实现 A 为 100 × 100 随机矩阵时,用 QR 和 Cholesky 分解求 x 的程序。你可以参考本次课
用到的 useEigen 例程。
代码如下:
#include
#include
// Eigen 部分
#include
// 稠密矩阵的代数运算(逆,特征值等)
#include
using namespace std;
using namespace Eigen;
#define MATRIX_SIZE 100
int main(int argc, char const *argv[])
{
MatrixXd A;
MatrixXd B;
MatrixXd X1;
MatrixXd X2;
A = MatrixXd::Random(MATRIX_SIZE,MATRIX_SIZE);
B = MatrixXd::Random(MATRIX_SIZE,1);
clock_t time_stt = clock(); //time_1
//X = A.inverse() *B
X1 = A.colPivHouseholderQr().solve(B);//QR
cout<<"time use in QR decomposition is" << 1000*(clock()-time_stt)/(double)CLOCKS_PER_SEC<<"ms"< 运行结果:

可知 chelosky分解法的运算速度远快于 QR 分解法。
提示:你可能需要参考相关的数学书籍或文章。请善用搜索引擎。Eigen 固定大小矩阵最大支持到 50,
所以你会用到动态大小的矩阵。
矩阵论基础 (2 分,约 2 小时)
除了我们本科学过的基础线性代数之外,大部分研究生课程还会开设矩阵论课程,以作为对本科阶段
知识的扩充。对于很多线性问题(SLAM 里也会碰到许多线性问题),了解一些矩阵论基础知识是很有好
处的。我们在附件中为大家提供了张贤达老师的《矩阵分析与应用》。请参考该书内容(或者你能找到的其
他书籍),回答以下问题。
-
什么是正定矩阵和半正定矩阵?
正定和半正定这两个词的英文分别是positive definite和positive semi-definite。
若所有特征值均大于零,则称为正定。
若所有特征值均不小于零,则称为半正定。 -
对于方阵 A,它的特征值是什么?特征向量是什么?特征值一定是实数吗?如何计算一个矩阵的
特征值?
(1) 只有方阵才存在特征值和特征向量;
(2) 方阵的特征向量一定是非零向量;
(3) 对于方阵A来说,对应于同一特征值的特征向量不唯一.


特征值不一定是实数,也可能是虚数。
如何计算矩阵的特征值:

-
什么是矩阵的相似性?相似性反映了什么几何意义?

反映的几何意义:
相似的矩阵是同一个线性变换在不同基/坐标系下的的不同描述。线性变换若粗略看成一个刚体的特定运动。刚体的特定运动是同一个,但坐标系改变的话这个运动的描述函数就会不一样,如果这个函数可用矩阵等价替代的话,一个坐标系就对应着一个矩阵,因此这些矩阵就不同,但这些矩阵必有关系,这个关系就是相似。
(作者:renguangqian
链接:https://www.zhihu.com/question/25352258/answer/67426927
来源:知乎)
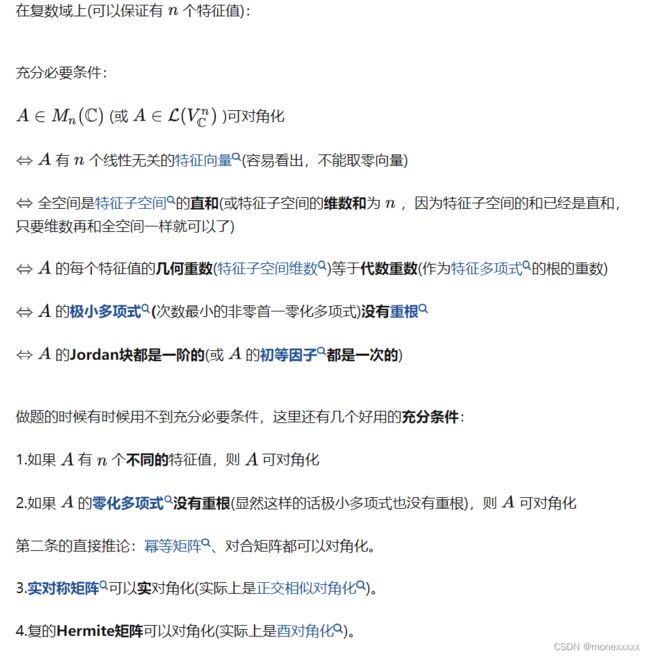
- 矩阵一定能对角化吗?什么样的矩阵能保证对角化?不能对角化的矩阵能够形成什么样的形式(Jor-dan 标准形)?

来源:知乎
- 奇异值分解(SVD)是什么意思?

6. 矩阵的伪逆是什么意思(Pseudo inverse)?莫尔——彭多斯逆是如何定义的?怎么计算一个矩阵的
伪逆?
伪逆矩阵是逆矩阵的广义形式。由于奇异矩阵或非方阵的矩阵不存在逆矩阵,但在matlab里可以用函数pinv(A)求其伪逆矩阵。基本语法为X=pinv(A),X=pinv(A,tolo),其中tolo为误差,pinv为pseudo-inverse的缩写。
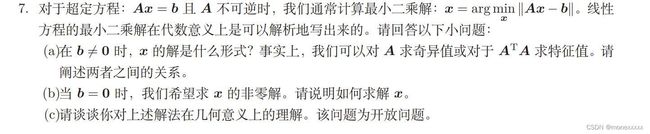
(a)实际上,对于超定方程Ax = 0的解就是 ATA 最小特征值对应的特征向量。
简单的讲 所有的矩阵都可以进行奇异值分解,不管其是否是方阵以及对称矩阵。当所给的矩阵是对称的方阵,A(T)=A,二者的结果是相同的。也就是说对称矩阵的特征值分解是所有奇异值分解的一个特例。
但是二者还是存在一些小的差异,奇异值分解需要对奇异值从大到小的排序,而且全部是大于等于零。
特征值用来描述方阵,可看做是从一个空间到自身的映射,这也表现在了名字eigenvalue中。奇异值可以描述长方阵或奇异矩阵,可看做是从一个空间到另一个空间的映射。
————————————————
版权声明:本文为CSDN博主「啦啦啦1231213」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/m0_61238051/article/details/120606022
(b)对于超定方程Ax = 0的解就是 ATA 最小特征值对应的特征向量。
(c)可以通过近似将原来无解的问题,求出近似解。且在坐标系图中,每个样本点与拟合直线间的距离即代表估计的误差。
**
几何运算练习 (2 分,约 1 小时)
**
下面我们来练习如何使用 Eigen/Geometry 计算一个具体的例子。
一个机器人上通常会安装许多不同的传感器,而且这些传感器之间还存在固连关系。我们举一个典型
的例子。
在世界系 W 下,存在一个运动的机器人 R。按照固定的或者某些开发人员或者领导的特殊喜好,R
系定义在机器人脚部的位置。但是机器人在设计的时候,又定义了 B 系(Body 系,或本体系),位于机器
人头部的位置。由于沟通不畅,标定人员把一台激光传感器和一台视觉传感器标定在了 B 系下。我们称激
光传感器为 L 系,视觉传感器为 C 系。现在请你完成以下工作:
- 说明一个激光传感器下的看到的点应该如何计算它的世界坐标。
- 取:qW R = [0.55, 0.3, 0.2, 0.2], tW R = [0.1, 0.2, 0.3]T,qRB = [0.99, 0, 0, 0.01], tRB = [0.05, 0, 0.5]T,
qBL = [0.3, 0.5, 0, 20.1], tBL = [0.4, 0, 0.5]T
, qBC = [0.8, 0.2, 0.1, 0.1], tBC = [0.5, 0.1, 0.5]T。现在假
设相机传感器观察到自身坐标系下的点 [0.3, 0.2, 1.2],请计算:
(a)这个点在激光系下的坐标;
(b)这个点在世界系下的坐标。
提示: - 本题的数据是随意取的,没有真实意义,产生什么结果都不要奇怪。
- 四元数在使用前需要归一化。
- 请注意 Eigen 在使用四元数时的虚部和实部顺序。
using namespace std;
#include
#include
using namespace Eigen;
int main(int argc, char ** argv){
//创建视觉传感器和激光传感器的四元数
Quaterniond q_BL(0.3, 0.5, 0,20.1), q_BC(0.8, 0.2, 0.1, 0.1);
//四元数归一化
q_BC.normalize();
q_BL.normalize();
//平移向量t1和t2
Vector3d t_BL(0.4, 0, 0.5), t_BC(0.5, 0.1, 0.5);
//p1坐标
Vector3d p1(0.3, 0.2, 1.2);
//变换矩阵Tc1w和Tc2w
Isometry3d T_BL(q_BL), T_BC(q_BC);
T_BL.pretranslate(t_BL);
T_BC.pretranslate(t_BC);
//计算p2
Vector3d p2 = T_BL.inverse()*T_BC*p1;
cout <<"这个点在视觉传感器系下的坐标"<< p2.transpose() << endl;
Vector3d p23= T_BL*T_BC.inverse()*p1;
cout <<"这个点在激光系下的坐标"<< p23.transpose() << endl;
//创建世界系和机器人本体的四元数
Quaterniond q3(0.55, 0.3, 0.2,0.2), q4(0.99, 0, 0, 0.01);
//四元数归一化
q3.normalize();
q4.normalize();
//平移向量t3和t4
Vector3d t3(0.1, 0.2, 0.3), t4(0.05, 0, 0.5);
//变换矩阵Tc3w和Tc4w
Isometry3d Tc3w(q3), Tc4w(q4);
Tc3w.pretranslate(t3);
Tc4w.pretranslate(t4);
//计算p3
Vector3d p3 = Tc4w*Tc3w*p1;
cout <<"这个点在世界系下的坐标"<< p3.transpose() << endl;
return 0;
}

**
旋转的表达 (2 分,约 1 小时)
**
课程中提到了旋转可以用旋转矩阵、旋转向量与四元数表达,其中旋转矩阵与四元数是日常应用中常
见的表达方式。请根据课件知识,完成下述内容的证明。


罗德里格斯公式的证明 (1 分,约 1 小时)
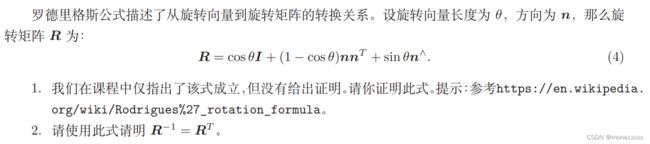
***从其他网页摘录推导如下:***(前面的部分分解没有很看懂....)

至此,得证。
转自 https://www.cnblogs.com/jingrui/p/9712461.html
四元数运算性质的验证 (1 分,约 1 小时)

不行了 今天看不下去矩阵… 改日再战
熟悉 C++11 (2 分,约 1 小时)
C++ 是一门古老的语言,但它的标准至今仍在不断发展。在 2011 年、2014 年和 2017 年,C++ 的标
准又进行了更新,被称为 C++11,C++14,C++17。其中,C++11 标准是最重要的一次更新,让 C++
发生了重要的改变,也使得近年来的 C++ 程序与你在课本上(比如谭浩强)学到的 C++ 程序有很大的
不同。你甚至会惊叹这是一种全新的语言。C++14 和 C++17 则是对 11 标准的完善与扩充。
越来越多的程序开始使用 11 标准,它也会让你在写程序时更加得心应手。本题中,你将学习一些 11
标准下的新语法。请参考本次作业 books/目录下的两个 pdf,并回答下面的问题。
设有类 A,并有 A 类的一组对象,组成了一个 vector。现在希望对这个 vector 进行排序,但排序的
方式由 A.index 成员大小定义。那么,在 C++11 的语法下,程序写成:

- 序列for循环
for循环 可以用于遍历数组,容器,string以及由begin和end函数定义的序列(即有Iterator)。
- 新的关键字auto(新东西!)
C++11中引入auto第一种作用是为了自动类型推导
auto的自动类型推导,用于从初始化表达式中推断出变量的数据类型。通过auto的自动类型推导,可以大大简化我们的编程工作,auto实际上实在编译时对变量进行了类型推导,所以不会对程序的运行效率造成不良影响。另外,似乎auto并不会影响编译速度,因为编译时本来也要右侧推导然后判断与左侧是否匹配。
- Lambda表达式(新东西捏!)
lambda表达式类似Javascript中的闭包,它可以用于创建并定义匿名的函数对象,以简化编程工作。
Lambda的语法如下:
[函数对象参数](操作符重载函数参数)->返回值类型{函数体}

————————————————
版权声明:本文为CSDN博主「小白的进修之路」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_44218240/article/details/105765486
**
ch3算是草草的完结惹 ^ ^ 还剩一点点数学推导
**