【面经专栏】自己整理的数据结构与算法面经
1、排序算法的稳定性
堆排序、快速排序是不稳定的排序算法,而冒泡排序、插入排序、归并排序是稳定的排序算法。
【总结排序算法实现与稳定性】https://www.cnblogs.com/lqminn/p/3642027.html
假定在待排序的记录序列中,存在多个具有相同的关键字的记录,若经过排序,这些记录的相对次序保持不变,即在原 序列中,ri=rj,且ri在rj之前,而在排序后的序列中,ri仍在rj之前,则称这种排序算法是稳定的;否则称为不稳定的。
2、红黑树和AVL树的区别
AVL树是带有平衡条件的二叉查找树,一般是用平衡因子差值判断是否平衡并通过旋转来实现平衡,左右子树树高不超过1,和红黑树相比,AVL树是严格的平衡二叉树,平衡条件必须满足(所有节点的左右子树高度差的绝对值不超过1)。不管我们是执行插入还是删除操作,只要不满足上面的条件,就要通过旋转来保持平衡,而旋转是非常耗时的,由此我们可以知道AVL树适合用于插入与删除次数比较少,但查找多的情况
一种二叉查找树,在每个节点增加一个存储位表示节点的颜色,可以是红或黑(非红即黑)。通过对任何一条从根到叶子的路径上各个节点着色的方式的限制,红黑树确保没有一条路径会比其它路径长出两倍,因此,红黑树是一种弱平衡二叉树(由于是弱平衡,可以看到,在相同的节点情况下,AVL树的高度低于红黑树),相对于要求严格的AVL树来说,它的旋转次数少,所以对于搜索,插入,删除操作较多的情况下,我们就用红黑树。
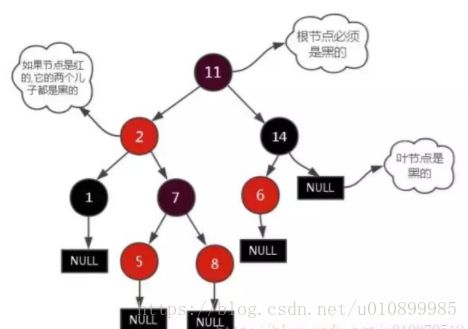
红黑树有如下特征:
- 每个节点非红即黑
- 根节点是黑的
- 每个叶节点(叶节点即树尾端NULL指针或NULL节点)都是黑的
- 如果一个节点是红的,那么它的两儿子都是黑的
- 对于任意节点而言,其到叶子点树NULL指针的每条路径都包含相同数目的黑节点
红黑树的应用:
- STL的map和set
- IO多路复用的epoll的的的实现采用红黑树组织管理的的的sockfd,以支持快速的增删改查
- Linux用红黑树管理进程控制块,进程的虚拟内存区域都存储在一颗红黑树上,每个虚拟地址区域都对应红黑树的一个节点
3、最快的排序算法
在平均情况下,快速排序最快;
在最好情况下,插入排序和冒泡排序最快;
在最坏情况下,堆排序和归并排序最快
4、hash表排序,对应的优化
#include 将待排序数组nums中的数存放到哈希表中,nums[i]存到下标为哈希表hash_map的下标nums[i]处,hash_map[nums[i]]的值即nums[i]在nums中的出现次数
最后,从前向后遍历hash_map,输出不为0的值(若hash_map[nums[i]]>1,则在该位置上循环输出所有的nums[i])
时间复杂度 O(m*n),m为nums数组长度,n为nums[i]的重复次数
5、二叉树的前序遍历、层序遍历时间复杂度
前中后序遍历采用递归与迭代的方式,每个节点均访问一次,时间复杂度是O(n)
递归的方式要是用栈空间,空间复杂度也是O(n)
6、快速排序、归并排序的时间复杂度怎么计算的
快排:最好O(nlogn),平均O(nlogn),最坏O(n2)
每次分成两段,那么分的次数就是logn了,每一次处理需要n次计算,那么时间复杂度就是nlogn。注意这是平均时间复杂度,但是在分的时候可能并不均匀。最坏是O(n^2),这种情况就是数组刚好是有序,然后每次取pivot的时候都是取最大或者最小
最优的情况下空间复杂度为:O(logn) ;每一次都平分数组的情况
最差的情况下空间复杂度为:O( n ) ;退化为冒泡排序的情况
归并:最好O(nlogn),平均O(nlogn),最差O(nlogn)
因为采用分治,先分成最小的两段,在“治”的过程中再merge,这样不管什么情况,始终是O(nlogn)
7、对于一个排序算法,哪方面是最重要的
一个排序算法的好坏,取决于时间复杂度、空间复杂度、使用场景和稳定性
稳定性是一个特别重要的评估标准。稳定的算法在排序的过程中不会改变元素彼此的位置的相对次序,反之不稳定的排序算法经常会改变这个次序。我们在使用排序算法或者选择排序算法时,更希望这个次序不会改变,更加稳定,所以排序算法的稳定性,是一个特别重要的参数衡量指标依据。
8、完全二叉树、二叉搜索树、平衡二叉树、红黑树、B树、B+树
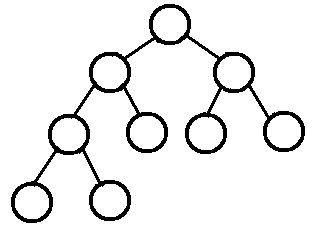
完全二叉树:
若设二叉树的深度为k,除第 k 层外,其它各层 (1~k-1) 的结点数都达到最大个数,第k 层所有的结点都连续集中在最左边,这就是完全二叉树。
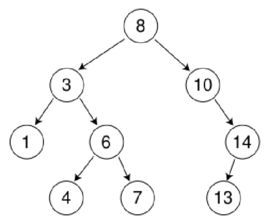
二叉查找树:
左子树的节点都小于根节点,右子树的节点都大于根节点
**平衡二叉树:**时间复杂度:查找O(logn)、插入删除O(logn),在每一偶次增删节点后,可能会出现旋转操作
是二叉查找树的一个进化体,又叫AVL树。平衡二叉树要求对于每一个节点来说,它的左右子树的高度之差不能超过1,如果插入或者删除一个节点使得高度之差大于1,就要进行节点之间的旋转,将二叉树重新维持在一个平衡状态
这个方案很好的解决了二叉查找树退化成链表的问题,把插入,查找,删除的时间复杂度最好情况和最坏情况都维持在O(logN)。但是频繁旋转会使插入和删除牺牲掉O(logN)左右的时间,不过相对二叉查找树来说,时间上稳定了很多。

红黑树就是一种弱平衡二叉树,时间复杂度:查找O(logn)、插入删除O(logn)
由于红黑树的弱平衡,它查询的时间复杂度在同等级别上略高于平衡二叉树,适用于增删频繁的场景
B树:
B 树相对于平衡二叉树,每个节点存储了更多的键值(key)和数据(data),并且每个节点拥有更多的子节点。基于这个特性,B 树查找数据读取磁盘的次数将会很少,数据的查找效率也会比平衡二叉树高很多。
B+树:
B+ 树是对 B 树的进一步优化。
-
B+ 树非叶子节点上是不存储数据的,仅存储键值,而 B 树节点中不仅存储键值,也会存储数据
如果不存储数据,那么就会存储更多的键值,相应的树的阶数(节点的子节点树)就会更大,树就会更矮更胖,如此一来我们查找数据进行磁盘的 IO 次数又会再次减少,数据查询的效率也会更快。
-
B+树所有数据均存放于叶子节点,查找任意一个数据均需要从根节点走到叶子节点,使得查询效率更加稳定
-
B+树叶子节点连接成链表,支持范围查询,B树只能使用中序遍历按序扫库
9、红黑树怎么确定节点颜色
根据红黑树的性质:
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
- 每个叶子结点都是黑色的 ( 此处的叶子结点指的是空结点 )
插入红色节点树的性质可能不会改变,而插入黑色节点每次都会违反性质4.
通过性质发现: 将节点设置为红色在插入时对红黑树造成的影响是小的,而黑色是最大的
将红黑树的节点默认颜色设置为红色,是为尽可能减少在插入新节点对红黑树造成的影响
10、冒泡排序的优化
- 优化1:在交换的地方加一个标记,如果那一趟排序没有交换元素,说明这组数据已经有序,不用再继续下去。
- 优化2:记下最后一次交换的位置,后边没有交换,必然是有序的,然后下一次排序从第一个比较到上次记录的位置结束即可
- 优化3:一次排序可以确定两个值,正向扫描找到最大值交换到最后,反向扫描找到最小值交换到最前面
https://blog.csdn.net/hansionz/article/details/80822494?utm_medium=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-1.control&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-1.control
12、哈希是无序的,怎样保证插入删除的顺序
LRU
双向链表、插入删除查看的时候将目标节点移动到链表头部
13、M个苹果放在N个盘子里,有多少种不同的放法
https://blog.csdn.net/wengyupeng/article/details/84753175?utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-1.essearch_pc_relevant&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-1.essearch_pc_relevant
14.冒泡排序、快速排序的适用场景
冒泡:适用于数据量很小的排序场景,因为冒泡原理简单
快排:适用于数据杂乱无章的场景,而且越乱,快速排序的效率越体现的淋漓尽致
15、从两个文件(50亿记录)中找到共同的记录
给定a、b两个文件,各存放50亿个url,每个url各占用64字节,内存限制是4G,如何找出a、b文件共同的url?
- 可以估计每个文件的大小为5G*64=300G,远大于4G。所以不可能将其完全加载到内存中处理。考虑采取分而治之的方法。
- 遍历文件a,对每个url求取hash(url)%1000,然后根据所得值将url分别存储到1000个小文件(设为a0,a1,…a999)当中。这样每个小文件的大小约为300M。遍历文件b,采取和a相同的方法将url分别存储到1000个小文件(b0,b1….b999)中。这样处理后,所有可能相同的url都在对应的小文件(a0 vs b0, a1 vs b1….a999 vs b999)当中,不对应的小文件(比如a0 vs b99)不可能有相同的url。然后我们只要求出1000对小文件中相同的url即可。
- 比如对于a0 vs b0,我们可以遍历a0,将其中的url存储到hash_map当中。然后遍历b0,如果url在hash_map中,则说明此url在a和b中同时存在,保存到文件中即可。
- 如果分成的小文件不均匀,导致有些小文件太大(比如大于2G),可以考虑将这些太大的小文件再按类似的方法分成小小文件即可。
16、从1亿个数里面找出前100个最大的
先hash去重,如果文件还是很大就分成小文件,对每一个小文件采用最小堆排序,最后所有小文件的堆中元素来排序
17、有23枚硬币在桌上,10枚正面朝上。蒙住你的眼睛,如何让左右两摞硬币正面朝上的一样多
https://blog.csdn.net/leingz/article/details/17171037
18、如何用5L和6L的杯子,得到3L的水
https://zhidao.baidu.com/question/653421752315561725.html
19、从100亿条记录的文本文件中取出重复数最多的前10条
https://blog.csdn.net/qq_26498709/article/details/78432054
- 先设计一个哈希函数,把100个G的文件分成10000份,每份大约是 10MB,可以加载进内存了
- 10MB 的小文件加进内存,统计出现次数最多的那个ip(10MB 的小文件里面存着很多 ip,他们虽然是乱序的,但是相同的 ip 会映射到同一个文件中)
- 用map存(ip, count),排序规则为count降序
- 读每个小文件的map中前10个ip,比较所有小文件的前10个ip
20、LRU的优缺点
https://www.jianshu.com/p/213ea9000e1a
1.**命中率,**当存在热点数据时,LRU的效率很好,但偶发性的,周期性的批量操作会导致LRU命中率急剧下降,缓存污染情况比较严重
2,实现相对简单
3,命中时需要遍历链表,找到命中的数据块索引,然后需要将数据移到头部
21、判断一棵树是否为完全二叉树
https://blog.csdn.net/qq_37236745/article/details/107077078