【强化学习】PPO算法求解倒立摆问题 + Pytorch代码实战
文章目录
- 一、倒立摆问题介绍
- 二、PPO算法简介
- 三、详细资料
- 四、Python代码实战
-
- 4.1 运行前配置
- 4.2 主要代码
- 4.3 运行结果展示
- 4.4 关于可视化的设置
一、倒立摆问题介绍
Agent 必须在两个动作之间做出决定 - 向左或向右移动推车 - 以使连接到它的杆保持直立。
二、PPO算法简介
近端策略优化 ( proximal policy optimization, PPO):
避免在使用重要性采样时由于在 θ \theta θ 下的 p θ ( a t ∣ s t ) p_\theta\left(a_t \mid s_t\right) pθ(at∣st) 与在 θ ′ \theta^{\prime} θ′ 下的 p θ ′ ( a t ∣ s t ) p_{\theta^{\prime}}\left(a_t \mid s_t\right) pθ′(at∣st) 相差太多, 导致重要性采样结果偏差较大而采取的算法。具体来说就是在训练的过 程中增加一个限制, 这个限制对应 θ \theta θ 和 θ ′ \theta^{\prime} θ′ 输出的动作的 KL 散度, 来衡量 θ \theta θ 与 θ ′ \theta^{\prime} θ′ 的相似程度。
三、详细资料
关于更加详细的PPO算法介绍,请看我之前发的博客:【EasyRL学习笔记】第五章 Proximal Policy Optimization 近端策略优化算法
在学习PPO算法前你最好能了解以下知识点:
- 全连接神经网络
- 神经网络求解分类问题
- 神经网络基本工作原理
- KL散度
四、Python代码实战
4.1 运行前配置
准备好一个RL_Utils.py文件,文件内容可以从我的一篇里博客获取:【RL工具类】强化学习常用函数工具类(Python代码)
这一步很重要,后面需要引入该RL_Utils.py文件

4.2 主要代码
import argparse
import datetime
import time
import torch.optim as optim
from torch.distributions.categorical import Categorical
import gym
from torch import nn
# 这里需要改成自己的RL_Utils.py文件的路径
from Python.ReinforcementLearning.EasyRL.RL_Utils import *
class PPOMemory:
def __init__(self, batch_size):
self.states = []
self.probs = []
self.vals = []
self.actions = []
self.rewards = []
self.dones = []
self.batch_size = batch_size
def sample(self):
batch_step = np.arange(0, len(self.states), self.batch_size)
indices = np.arange(len(self.states), dtype=np.int64)
np.random.shuffle(indices)
batches = [indices[i:i + self.batch_size] for i in batch_step]
return np.array(self.states), np.array(self.actions), np.array(self.probs), \
np.array(self.vals), np.array(self.rewards), np.array(self.dones), batches
def push(self, state, action, probs, vals, reward, done):
self.states.append(state)
self.actions.append(action)
self.probs.append(probs)
self.vals.append(vals)
self.rewards.append(reward)
self.dones.append(done)
def clear(self):
self.states = []
self.probs = []
self.actions = []
self.rewards = []
self.dones = []
self.vals = []
class Actor(nn.Module):
def __init__(self, n_states, n_actions,
hidden_dim):
super(Actor, self).__init__()
self.actor = nn.Sequential(
nn.Linear(n_states, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, n_actions),
nn.Softmax(dim=-1)
)
def forward(self, state):
dist = self.actor(state)
dist = Categorical(dist)
return dist
class Critic(nn.Module):
def __init__(self, n_states, hidden_dim):
super(Critic, self).__init__()
self.critic = nn.Sequential(
nn.Linear(n_states, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 1)
)
def forward(self, state):
value = self.critic(state)
return value
class PPO:
def __init__(self, n_states, n_actions, cfg):
self.gamma = cfg['gamma']
self.continuous = cfg['continuous']
self.policy_clip = cfg['policy_clip']
self.n_epochs = cfg['n_epochs']
self.gae_lambda = cfg['gae_lambda']
self.device = cfg['device']
self.actor = Actor(n_states, n_actions, cfg['hidden_dim']).to(self.device)
self.critic = Critic(n_states, cfg['hidden_dim']).to(self.device)
self.actor_optimizer = optim.Adam(self.actor.parameters(), lr=cfg['actor_lr'])
self.critic_optimizer = optim.Adam(self.critic.parameters(), lr=cfg['critic_lr'])
self.memory = PPOMemory(cfg['batch_size'])
self.loss = 0
def choose_action(self, state):
state = np.array([state]) # 先转成数组再转tensor更高效
state = torch.tensor(state, dtype=torch.float).to(self.device)
dist = self.actor(state)
value = self.critic(state)
action = dist.sample()
probs = torch.squeeze(dist.log_prob(action)).item()
if self.continuous:
action = torch.tanh(action)
else:
action = torch.squeeze(action).item()
value = torch.squeeze(value).item()
return action, probs, value
def update(self):
for _ in range(self.n_epochs):
state_arr, action_arr, old_prob_arr, vals_arr, reward_arr, dones_arr, batches = self.memory.sample()
values = vals_arr[:]
### compute advantage ###
advantage = np.zeros(len(reward_arr), dtype=np.float32)
for t in range(len(reward_arr) - 1):
discount = 1
a_t = 0
for k in range(t, len(reward_arr) - 1):
a_t += discount * (reward_arr[k] + self.gamma * values[k + 1] * \
(1 - int(dones_arr[k])) - values[k])
discount *= self.gamma * self.gae_lambda
advantage[t] = a_t
advantage = torch.tensor(advantage).to(self.device)
### SGD ###
values = torch.tensor(values).to(self.device)
for batch in batches:
states = torch.tensor(state_arr[batch], dtype=torch.float).to(self.device)
old_probs = torch.tensor(old_prob_arr[batch]).to(self.device)
actions = torch.tensor(action_arr[batch]).to(self.device)
dist = self.actor(states)
critic_value = self.critic(states)
critic_value = torch.squeeze(critic_value)
new_probs = dist.log_prob(actions)
prob_ratio = new_probs.exp() / old_probs.exp()
weighted_probs = advantage[batch] * prob_ratio
weighted_clipped_probs = torch.clamp(prob_ratio, 1 - self.policy_clip,
1 + self.policy_clip) * advantage[batch]
actor_loss = -torch.min(weighted_probs, weighted_clipped_probs).mean()
returns = advantage[batch] + values[batch]
critic_loss = (returns - critic_value) ** 2
critic_loss = critic_loss.mean()
total_loss = actor_loss + 0.5 * critic_loss
self.loss = total_loss
self.actor_optimizer.zero_grad()
self.critic_optimizer.zero_grad()
total_loss.backward()
self.actor_optimizer.step()
self.critic_optimizer.step()
self.memory.clear()
def save_model(self, path):
Path(path).mkdir(parents=True, exist_ok=True)
actor_checkpoint = os.path.join(path, 'ppo_actor.pt')
critic_checkpoint = os.path.join(path, 'ppo_critic.pt')
torch.save(self.actor.state_dict(), actor_checkpoint)
torch.save(self.critic.state_dict(), critic_checkpoint)
def load_model(self, path):
actor_checkpoint = os.path.join(path, 'ppo_actor.pt')
critic_checkpoint = os.path.join(path, 'ppo_critic.pt')
self.actor.load_state_dict(torch.load(actor_checkpoint))
self.critic.load_state_dict(torch.load(critic_checkpoint))
# 训练函数
def train(arg_dict, env, agent):
# 开始计时
startTime = time.time()
print(f"环境名: {arg_dict['env_name']}, 算法名: {arg_dict['algo_name']}, Device: {arg_dict['device']}")
print("开始训练智能体......")
rewards = [] # 记录所有回合的奖励
ma_rewards = [] # 记录所有回合的滑动平均奖励
steps = 0
for i_ep in range(arg_dict['train_eps']):
state = env.reset()
done = False
ep_reward = 0
while not done:
# 画图
if arg_dict['train_render']:
env.render()
action, prob, val = agent.choose_action(state)
state_, reward, done, _ = env.step(action)
steps += 1
ep_reward += reward
agent.memory.push(state, action, prob, val, reward, done)
if steps % arg_dict['update_fre'] == 0:
agent.update()
state = state_
rewards.append(ep_reward)
if ma_rewards:
ma_rewards.append(0.9 * ma_rewards[-1] + 0.1 * ep_reward)
else:
ma_rewards.append(ep_reward)
if (i_ep + 1) % 10 == 0:
print(f"回合:{i_ep + 1}/{arg_dict['train_eps']},奖励:{ep_reward:.2f}")
print('训练结束 , 用时: ' + str(time.time() - startTime) + " s")
# 关闭环境
env.close()
return {'episodes': range(len(rewards)), 'rewards': rewards}
# 测试函数
def test(arg_dict, env, agent):
startTime = time.time()
print("开始测试智能体......")
print(f"环境名: {arg_dict['env_name']}, 算法名: {arg_dict['algo_name']}, Device: {arg_dict['device']}")
rewards = [] # 记录所有回合的奖励
ma_rewards = [] # 记录所有回合的滑动平均奖励
for i_ep in range(arg_dict['test_eps']):
state = env.reset()
done = False
ep_reward = 0
while not done:
# 画图
if arg_dict['test_render']:
env.render()
action, prob, val = agent.choose_action(state)
state_, reward, done, _ = env.step(action)
ep_reward += reward
state = state_
rewards.append(ep_reward)
if ma_rewards:
ma_rewards.append(
0.9 * ma_rewards[-1] + 0.1 * ep_reward)
else:
ma_rewards.append(ep_reward)
print('回合:{}/{}, 奖励:{}'.format(i_ep + 1, arg_dict['test_eps'], ep_reward))
print("测试结束 , 用时: " + str(time.time() - startTime) + " s")
env.close()
return {'episodes': range(len(rewards)), 'rewards': rewards}
# 创建环境和智能体
def create_env_agent(arg_dict):
# 创建环境
env = gym.make(arg_dict['env_name'])
# 设置随机种子
all_seed(env, seed=arg_dict["seed"])
# 获取状态数
try:
n_states = env.observation_space.n
except AttributeError:
n_states = env.observation_space.shape[0]
# 获取动作数
n_actions = env.action_space.n
print(f"状态数: {n_states}, 动作数: {n_actions}")
# 将状态数和动作数加入算法参数字典
arg_dict.update({"n_states": n_states, "n_actions": n_actions})
# 实例化智能体对象
agent = PPO(n_states, n_actions, arg_dict)
# 返回环境,智能体
return env, agent
if __name__ == '__main__':
# 防止报错 OMP: Error #15: Initializing libiomp5md.dll, but found libiomp5md.dll already initialized.
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
# 获取当前路径
curr_path = os.path.dirname(os.path.abspath(__file__))
# 获取当前时间
curr_time = datetime.datetime.now().strftime("%Y_%m_%d-%H_%M_%S")
# 相关参数设置
parser = argparse.ArgumentParser(description="hyper parameters")
parser.add_argument('--algo_name', default='PPO', type=str, help="name of algorithm")
parser.add_argument('--env_name', default='CartPole-v0', type=str, help="name of environment")
parser.add_argument('--continuous', default=False, type=bool,
help="if PPO is continuous") # PPO既可适用于连续动作空间,也可以适用于离散动作空间
parser.add_argument('--train_eps', default=200, type=int, help="episodes of training")
parser.add_argument('--test_eps', default=20, type=int, help="episodes of testing")
parser.add_argument('--gamma', default=0.99, type=float, help="discounted factor")
parser.add_argument('--batch_size', default=5, type=int) # mini-batch SGD中的批量大小
parser.add_argument('--n_epochs', default=4, type=int)
parser.add_argument('--actor_lr', default=0.0003, type=float, help="learning rate of actor net")
parser.add_argument('--critic_lr', default=0.0003, type=float, help="learning rate of critic net")
parser.add_argument('--gae_lambda', default=0.95, type=float)
parser.add_argument('--policy_clip', default=0.2, type=float) # PPO-clip中的clip参数,一般是0.1~0.2左右
parser.add_argument('--update_fre', default=20, type=int)
parser.add_argument('--hidden_dim', default=256, type=int)
parser.add_argument('--device', default='cpu', type=str, help="cpu or cuda")
parser.add_argument('--seed', default=520, type=int, help="seed")
parser.add_argument('--show_fig', default=False, type=bool, help="if show figure or not")
parser.add_argument('--save_fig', default=True, type=bool, help="if save figure or not")
parser.add_argument('--train_render', default=False, type=bool,
help="Whether to render the environment during training")
parser.add_argument('--test_render', default=True, type=bool,
help="Whether to render the environment during testing")
args = parser.parse_args()
default_args = {'result_path': f"{curr_path}/outputs/{args.env_name}/{curr_time}/results/",
'model_path': f"{curr_path}/outputs/{args.env_name}/{curr_time}/models/",
}
# 将参数转化为字典 type(dict)
arg_dict = {**vars(args), **default_args}
print("算法参数字典:", arg_dict)
# 创建环境和智能体
env, agent = create_env_agent(arg_dict)
# 传入算法参数、环境、智能体,然后开始训练
res_dic = train(arg_dict, env, agent)
print("算法返回结果字典:", res_dic)
# 保存相关信息
agent.save_model(path=arg_dict['model_path'])
save_args(arg_dict, path=arg_dict['result_path'])
save_results(res_dic, tag='train', path=arg_dict['result_path'])
plot_rewards(res_dic['rewards'], arg_dict, path=arg_dict['result_path'], tag="train")
# =================================================================================================
# 创建新环境和智能体用来测试
print("=" * 300)
env, agent = create_env_agent(arg_dict)
# 加载已保存的智能体
agent.load_model(path=arg_dict['model_path'])
res_dic = test(arg_dict, env, agent)
save_results(res_dic, tag='test', path=arg_dict['result_path'])
plot_rewards(res_dic['rewards'], arg_dict, path=arg_dict['result_path'], tag="test")
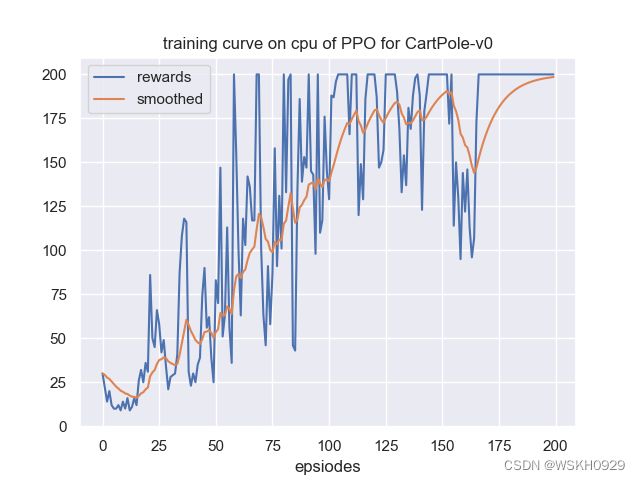
4.3 运行结果展示
由于有些输出太长,下面仅展示部分输出
状态数: 4, 动作数: 2
环境名: CartPole-v0, 算法名: PPO, Device: cpu
开始训练智能体......
回合:10/200,奖励:14.00
回合:20/200,奖励:36.00
回合:30/200,奖励:21.00
回合:40/200,奖励:23.00
回合:50/200,奖励:25.00
回合:60/200,奖励:155.00
回合:70/200,奖励:200.00
回合:80/200,奖励:101.00
回合:90/200,奖励:153.00
回合:100/200,奖励:145.00
回合:110/200,奖励:166.00
回合:120/200,奖励:200.00
回合:130/200,奖励:200.00
回合:140/200,奖励:200.00
回合:150/200,奖励:200.00
回合:160/200,奖励:144.00
回合:170/200,奖励:200.00
回合:180/200,奖励:200.00
回合:190/200,奖励:200.00
回合:200/200,奖励:200.00
训练结束 , 用时: 130.60313510894775 s
============================================================================================================================================================================================================================================================================================================
状态数: 4, 动作数: 2
开始测试智能体......
环境名: CartPole-v0, 算法名: PPO, Device: cpu
回合:1/20, 奖励:200.0
回合:2/20, 奖励:200.0
回合:3/20, 奖励:200.0
回合:4/20, 奖励:200.0
回合:5/20, 奖励:200.0
回合:6/20, 奖励:200.0
回合:7/20, 奖励:200.0
回合:8/20, 奖励:200.0
回合:9/20, 奖励:200.0
回合:10/20, 奖励:200.0
回合:11/20, 奖励:200.0
回合:12/20, 奖励:200.0
回合:13/20, 奖励:200.0
回合:14/20, 奖励:200.0
回合:15/20, 奖励:200.0
回合:16/20, 奖励:200.0
回合:17/20, 奖励:200.0
回合:18/20, 奖励:181.0
回合:19/20, 奖励:200.0
回合:20/20, 奖励:125.0
测试结束 , 用时: 31.763733386993408 s
PPO算法测试

策略梯度算法测试:【强化学习】Policy Gradient 策略梯度算法求解CartPole倒立摆问题 + Python代码实战
是不是明显感觉到经过PPO算法训练出来的智能体在测试中表现得更加稳呢!
4.4 关于可视化的设置
如果你觉得可视化比较耗时,你可以进行设置,取消可视化。
或者你想看看训练过程的可视化,也可以进行相关设置
