mmrotate自定义数据集安装部署训练测试
环境
Ubuntu18.04
cuda10.2
python3.7
2080s
一、安装
conda create -n mmrotate python=3.7
conda activate mmrotate
#1、 安装pytorch 和 cuda
# 建议在官网根据cuda版本安装 https://pytorch.org/get-started/locally/
conda install pytorch torchvision torchaudio cudatoolkit=10.2 -c pytorch
#2、安装mmcv
# 安装完成后pip list看一下 torch的版本 方便安装对应版本的mmcv
# 我安装的是cuda10.2和torch1.11.0
pip install mmcv-full -f https://download.openmmlab.com/mmcv/dist/cu102/torch1.11.0/index.html
#3、安装mmdetection
pip install mmdet
#4、从github上 clone mmrotate
git clone https://github.com/open-mmlab/mmrotate
#5、安装mmrotate并编译
cd mmrotate
pip install -r requirements.txt
pip install -V -e.
二、测试
# 1、下载pth文件
# 在demo目录的image_demo.py文件有该文件的使用说明
# 下载官方提供的pth文件
wget -P checkpoint https://download.openmmlab.com/mmrotate/v0.1.0/oriented_rcnn/oriented_rcnn_r50_fpn_1x_dota_le90

#2、在mmrotate目录下进行测试,执行如下命令
python demo/image_demo.py demo/demo.jpg configs/oriented_rcnn/oriented_rcnn_r50_fpn_1x_dota_le90.py checkpoint/oriented_rcnn_r50_fpn_1x_dota_le90-6d2b2ce0.pth
3、若弹出如下结果则说明环境安装正常
三、自定义数据集制作
mmrotate中所使用的数据集是dota格式的
DOTA标签格式
x1, y1, x2, y2, x3, y3, x4, y4, category: 目标名字 difficult:表示标签检测的难易程度 (1表示困难,0表示不困难)
x1,y1为左上角的坐标,然后顺时针排列4个坐标
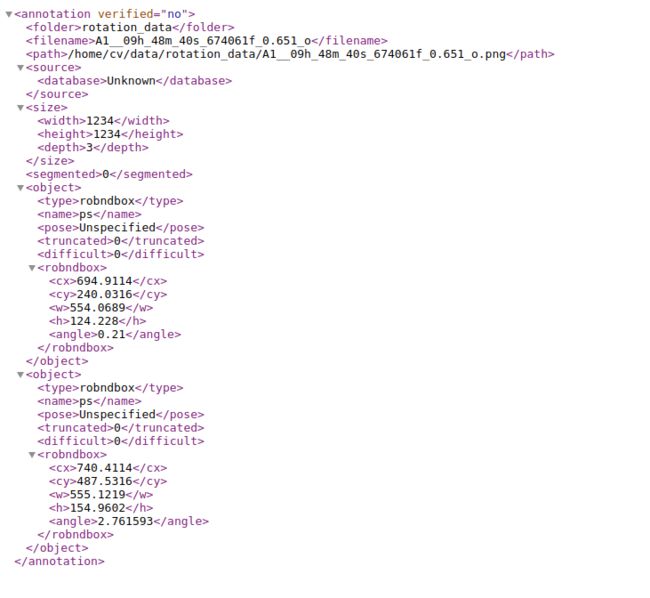
1、使用rolabelimg工具标注数据
标注文件xml文件如下
2、生成DOTA数据集的标签格式
import os
import xml.etree.ElementTree as ET
import math
import cv2 as cv
def voc_to_dota(xml_path, xml_name):
txt_name = xml_name[:-4] + '.txt'
txt_path = xml_path + '/txt_label'
if not os.path.exists(txt_path):
os.makedirs(txt_path)
txt_file = os.path.join(txt_path, txt_name)
file_path = os.path.join(xml_path, file_list[i])
tree = ET.parse(os.path.join(file_path))
root = tree.getroot()
# print(root[6][0].text)
image_path = 'data/dota/images/'
out_path = 'data/dota/outputImg/'
filename = image_path + xml_name[:-4] + '.jpg'
img = cv.imread(filename)
with open(txt_file, "w+", encoding='UTF-8') as out_file:
# out_file.write('imagesource:null' + '\n' + 'gsd:null' + '\n')
for obj in root.findall('object'):
name = obj.find('name').text
difficult = obj.find('difficult').text
# print(name, difficult)
robndbox = obj.find('robndbox')
cx = float(robndbox.find('cx').text)
cy = float(robndbox.find('cy').text)
w = float(robndbox.find('w').text)
h = float(robndbox.find('h').text)
angle = float(robndbox.find('angle').text)
# print(cx, cy, w, h, angle)
p0x, p0y = rotatePoint(cx, cy, cx - w / 2, cy - h / 2, -angle)
p1x, p1y = rotatePoint(cx, cy, cx + w / 2, cy - h / 2, -angle)
p2x, p2y = rotatePoint(cx, cy, cx + w / 2, cy + h / 2, -angle)
p3x, p3y = rotatePoint(cx, cy, cx - w / 2, cy + h / 2, -angle)
# 找最左上角的点
dict = {p0y:p0x, p1y:p1x, p2y:p2x, p3y:p3x }
list = find_topLeftPopint(dict)
#print((list))
if list[0] == p0x:
list_xy = [p0x, p0y, p1x, p1y, p2x, p2y, p3x, p3y]
elif list[0] == p1x:
list_xy = [p1x, p1y, p2x, p2y, p3x, p3y, p0x, p0y]
elif list[0] == p2x:
list_xy = [p2x, p2y, p3x, p3y, p0x, p0y, p1x, p1y]
else:
list_xy = [p3x, p3y, p0x, p0y, p1x, p1y, p2x, p2y]
# 在原图上画矩形 看是否转换正确
cv.line(img, (int(list_xy[0]), int(list_xy[1])), (int(list_xy[2]), int(list_xy[3])), color=(255, 0, 0), thickness= 3)
cv.line(img, (int(list_xy[2]), int(list_xy[3])), (int(list_xy[4]), int(list_xy[5])), color=(0, 255, 0), thickness= 3)
cv.line(img, (int(list_xy[4]), int(list_xy[5])), (int(list_xy[6]), int(list_xy[7])), color=(0, 0, 255), thickness= 2)
cv.line(img, (int(list_xy[6]), int(list_xy[7])), (int(list_xy[0]), int(list_xy[1])), color=(255, 255, 0), thickness= 2)
data = str(list_xy[0]) + " " + str(list_xy[1]) + " " + str(list_xy[2]) + " " + str(list_xy[3]) + " " + \
str(list_xy[4]) + " " + str(list_xy[5]) + " " + str(list_xy[6]) + " " + str(list_xy[7]) + " "
data = data + name + " " + difficult + "\n"
out_file.write(data)
# cv.imwrite(out_path + xml_name[:-4] + '.jpg', img)
def find_topLeftPopint(dict):
dict_keys = sorted(dict.keys()) # y值
temp = [dict[dict_keys[0]], dict[dict_keys[1]]]
minx = min(temp)
if minx == temp[0]:
miny = dict_keys[0]
else:
miny = dict_keys[1]
return [minx, miny]
# 转换成四点坐标
def rotatePoint(xc, yc, xp, yp, theta):
xoff = xp - xc
yoff = yp - yc
cosTheta = math.cos(theta)
sinTheta = math.sin(theta)
pResx = cosTheta * xoff + sinTheta * yoff
pResy = - sinTheta * xoff + cosTheta * yoff
# pRes = (xc + pResx, yc + pResy)
# 保留一位小数点
return float(format(xc + pResx, '.1f')), float(format(yc + pResy, '.1f'))
# return xc + pResx, yc + pResy
if __name__ == '__main__':
root_path = 'data/dota/xml'
file_list = os.listdir(root_path)
for i in range(0, len(file_list)):
if ('.xml' in file_list[i]) or ('.XML' in file_list[i]):
voc_to_dota(root_path, file_list[i])
print('----------------------------------------{}{}----------------------------------------'
.format(file_list[i], ' has Done!'))
else:
print(file_list[i] + ' is not xml file')
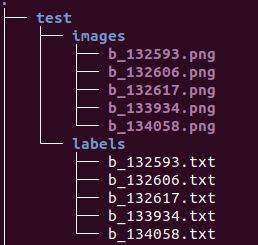
3、划分训练集验证集测试集
划分后的目录文件结构

python mmrotate-main/tools/data/dota/split/img_split.py --base_json mmrotate-main/tools/data/dota/split/split_configs/ss_train.json
4、切分图像
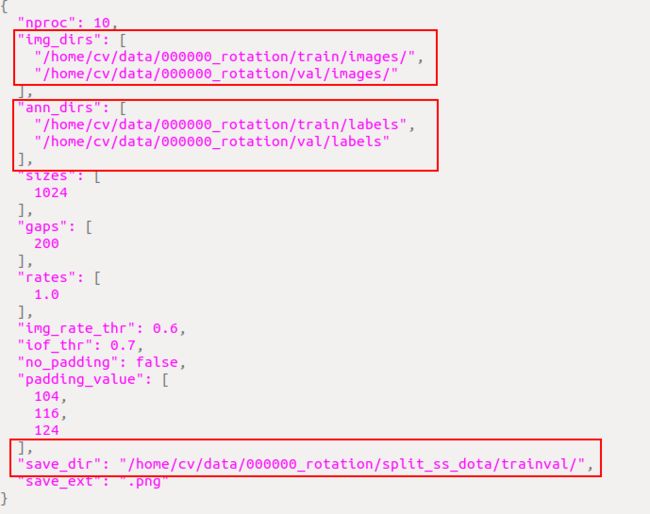
使用mmrotate中自带的tools工具,将数据进行裁减,并重新设为png格式的图像。
修改/home/cv/mmrotate/tools/data/dota/split/split_configs中的json文件,修改每个文件中的,如下几个路径即可。

分别使用脚本进行裁减
1411 python img_split.py --base-json split_configs/ss_train.json
1412 python img_split.py --base-json split_configs/ss_test.json
1413 python img_split.py --base-json split_configs/ss_trainval.json
1414 python img_split.py --base-json split_configs/ss_val.json
四、修改训练参数
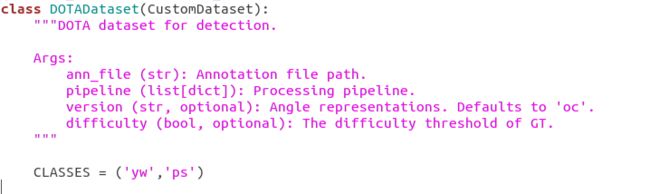
1、修改mmrotate/mmrotate/datasets的dota.py文件中的类别
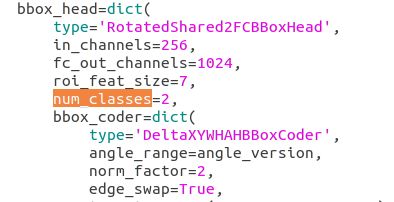
2、修改mmrotate/configs/rotated_faster_rcnn/rotated_faster_rcnn_r50_fpn_1x_dota_le90.py中的类别数量

修改rotated_faster_rcnn_r50_fpn_1x_dota_le90.py中的类别数量
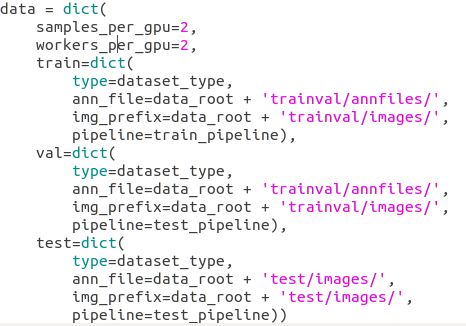
修改mmrotate/configs/base/datasets中的数据集路径

修改中mmrotate/configs/base/schedules/schedule_1x.py中的参数

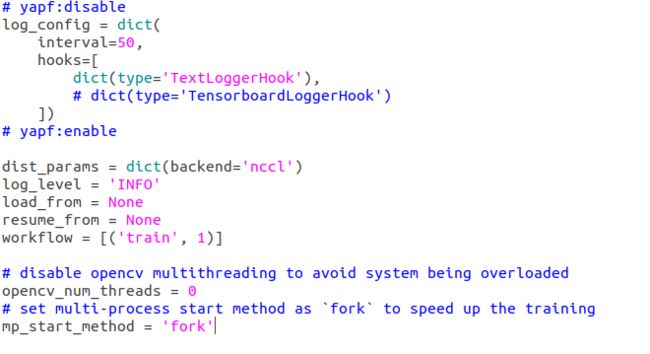
修改mmrotate/configs/base/default_runtime.py中的参数
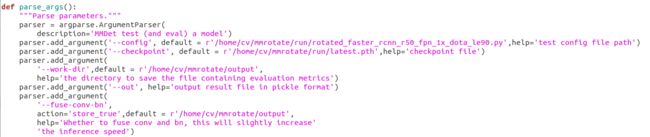
3、修改train中的参数
 主要修改–config和–word-dir
主要修改–config和–word-dir
python tools/train.py
提示如下信息为在训练

如果遇到 Cuda out of memory错误:可将 mmrotate-main/configs/base/datasets/dotav1.py文件中的samples_per_gpu 和 workers_per_gpu 改小一点。
六、测试
修改tools/tests.py
python tools/test.py --show
参考资料
https://blog.csdn.net/qq_43581224/article/details/123838415?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522165447944816782390592349%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=165447944816782390592349&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2alltop_positive~default-1-123838415-null-null.142v11pc_search_result_control_group,157v13new_style1&utm_term=mmrotate&spm=1018.2226.3001.4187