【DETR】使用DETR预训练模型进行预测
文章目录
- 前言
- 一、jupyter notebook运行代码
- 二、Pycharm(非jupyter notebook的IDE)
- 总结
前言
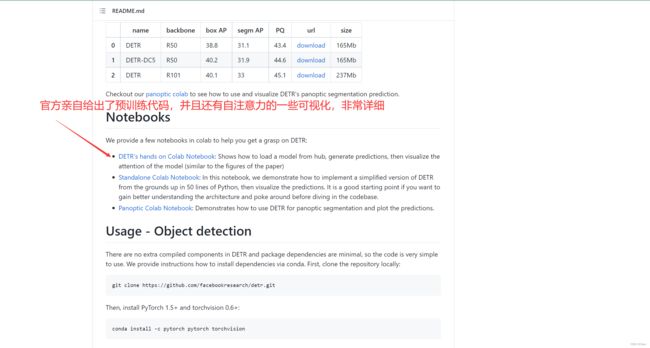
一篇文章结尾看到很多同学没有找到DETR的预测代码,这里我分享一下官方写的DETR的预测代码,其实就是github上DETR官方写的一个Jupyter notebook,可能需要梯子才能访问,这里我贴出来。因为DETR比较难训练,我觉得可以用官方的预训练模型来看看效果。
顺便说一下,这个模型是简易版,其实就是DETR论文最后一页贴出来的代码,mAP大概要比源码的低2-3个点,但已经很强了。只用了50行代码就把DETR模型架构展示出来了,真的是非常简洁的一个模型!
一、jupyter notebook运行代码
如果用的是jupyter notebook,用这个代码,修改代码末尾的图片路径即可
from PIL import Image
import matplotlib.pyplot as plt
%config InlineBackend.figure_format = 'svg'
import ipywidgets as widgets
from IPython.display import display, clear_output
import cv2
import torch
from torch import nn
from torchvision.models import resnet50
import torchvision.transforms as T
torch.set_grad_enabled(False)
from torchvision import models
# COCO classes
CLASSES = [
'N/A', 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus',
'train', 'truck', 'boat', 'traffic light', 'fire hydrant', 'N/A',
'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse',
'sheep', 'cow', 'elephant', 'bear', 'zebra', 'giraffe', 'N/A', 'backpack',
'umbrella', 'N/A', 'N/A', 'handbag', 'tie', 'suitcase', 'frisbee', 'skis',
'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove',
'skateboard', 'surfboard', 'tennis racket', 'bottle', 'N/A', 'wine glass',
'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple', 'sandwich',
'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake',
'chair', 'couch', 'potted plant', 'bed', 'N/A', 'dining table', 'N/A',
'N/A', 'toilet', 'N/A', 'tv', 'laptop', 'mouse', 'remote', 'keyboard',
'cell phone', 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'N/A',
'book', 'clock', 'vase', 'scissors', 'teddy bear', 'hair drier',
'toothbrush'
]
# colors for visualization
COLORS = [[0.000, 0.447, 0.741], [0.850, 0.325, 0.098], [0.929, 0.694, 0.125],
[0.494, 0.184, 0.556], [0.466, 0.674, 0.188], [0.301, 0.745, 0.933]]
# standard PyTorch mean-std input image normalization
transform = T.Compose([
T.Resize(800),
T.ToTensor(),
T.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
# for output bounding box post-processing
def box_cxcywh_to_xyxy(x):
x_c, y_c, w, h = x.unbind(1)
b = [(x_c - 0.5 * w), (y_c - 0.5 * h),
(x_c + 0.5 * w), (y_c + 0.5 * h)]
return torch.stack(b, dim=1)
def rescale_bboxes(out_bbox, size):
img_w, img_h = size
b = box_cxcywh_to_xyxy(out_bbox)
b = b * torch.tensor([img_w, img_h, img_w, img_h], dtype=torch.float32)
return b
def plot_results(pil_img, prob, boxes):
plt.figure(figsize=(16,10))
plt.imshow(pil_img)
ax = plt.gca()
colors = COLORS * 100
for p, (xmin, ymin, xmax, ymax), c in zip(prob, boxes.tolist(), colors):
ax.add_patch(plt.Rectangle((xmin, ymin), xmax - xmin, ymax - ymin,
fill=False, color=c, linewidth=3))
cl = p.argmax()
text = f'{CLASSES[cl]}: {p[cl]:0.2f}'
ax.text(xmin, ymin, text, fontsize=15,
bbox=dict(facecolor='yellow', alpha=0.5))
plt.axis('off')
plt.show()
def detect(im, model, transform):
# mean-std normalize the input image (batch-size: 1)
img = transform(im).unsqueeze(0)
# demo model only support by default images with aspect ratio between 0.5 and 2
# if you want to use images with an aspect ratio outside this range
# rescale your image so that the maximum size is at most 1333 for best results
assert img.shape[-2] <= 1600 and img.shape[-1] <= 1600, 'demo model only supports images up to 1600 pixels on each side'
# propagate through the model
outputs = model(img)
# keep only predictions with 0.7+ confidence
probas = outputs['pred_logits'].softmax(-1)[0, :, :-1]
keep = probas.max(-1).values > 0.7
# convert boxes from [0; 1] to image scales
bboxes_scaled = rescale_bboxes(outputs['pred_boxes'][0, keep], im.size)
return probas[keep], bboxes_scaled
class DETRdemo(nn.Module):
"""
Demo DETR implementation.
Demo implementation of DETR in minimal number of lines, with the
following differences wrt DETR in the paper:
* learned positional encoding (instead of sine)
* positional encoding is passed at input (instead of attention)
* fc bbox predictor (instead of MLP)
The model achieves ~40 AP on COCO val5k and runs at ~28 FPS on Tesla V100.
Only batch size 1 supported.
"""
def __init__(self, num_classes, hidden_dim=256, nheads=8,
num_encoder_layers=6, num_decoder_layers=6):
super().__init__()
# create ResNet-50 backbone
self.backbone = resnet50()
del self.backbone.fc
# create conversion layer
self.conv = nn.Conv2d(2048, hidden_dim, 1)
# create a default PyTorch transformer
self.transformer = nn.Transformer(
hidden_dim, nheads, num_encoder_layers, num_decoder_layers)
# prediction heads, one extra class for predicting non-empty slots
# note that in baseline DETR linear_bbox layer is 3-layer MLP
self.linear_class = nn.Linear(hidden_dim, num_classes + 1)
self.linear_bbox = nn.Linear(hidden_dim, 4)
# output positional encodings (object queries)
self.query_pos = nn.Parameter(torch.rand(100, hidden_dim))
# spatial positional encodings
# note that in baseline DETR we use sine positional encodings
self.row_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
self.col_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
def forward(self, inputs):
# propagate inputs through ResNet-50 up to avg-pool layer
x = self.backbone.conv1(inputs)
x = self.backbone.bn1(x)
x = self.backbone.relu(x)
x = self.backbone.maxpool(x)
x = self.backbone.layer1(x)
x = self.backbone.layer2(x)
x = self.backbone.layer3(x)
x = self.backbone.layer4(x)
# convert from 2048 to 256 feature planes for the transformer
h = self.conv(x)
# construct positional encodings
H, W = h.shape[-2:]
pos = torch.cat([
self.col_embed[:W].unsqueeze(0).repeat(H, 1, 1),
self.row_embed[:H].unsqueeze(1).repeat(1, W, 1),
], dim=-1).flatten(0, 1).unsqueeze(1)
# propagate through the transformer
h = self.transformer(pos + 0.1 * h.flatten(2).permute(2, 0, 1),
self.query_pos.unsqueeze(1)).transpose(0, 1)
# finally project transformer outputs to class labels and bounding boxes
return {'pred_logits': self.linear_class(h),
'pred_boxes': self.linear_bbox(h).sigmoid()}
if __name__=="__main__":
detr = DETRdemo(num_classes=91)
state_dict = torch.hub.load_state_dict_from_url(url='https://dl.fbaipublicfiles.com/detr/detr_demo-da2a99e9.pth',
map_location='cpu', check_hash=True)
detr.load_state_dict(state_dict)
detr.eval()
# 这里修改自己的图片路径即可,注意路径不要有中文,否则要加一行解码的代码
im = cv2.imread("test4.JPG")
im= cv2.cvtColor(im, cv2.COLOR_BGR2RGB)
im=Image.fromarray(im)
scores, boxes= detect(im, detr, transform)
plot_results(im, scores, boxes)
这是用我自己拍的图片跑的效果:
二、Pycharm(非jupyter notebook的IDE)
from PIL import Image
import matplotlib.pyplot as plt
import cv2
import torch
from torch import nn
from torchvision.models import resnet50
import torchvision.transforms as T
torch.set_grad_enabled(False)
# COCO classes
CLASSES = [
'N/A', 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus',
'train', 'truck', 'boat', 'traffic light', 'fire hydrant', 'N/A',
'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse',
'sheep', 'cow', 'elephant', 'bear', 'zebra', 'giraffe', 'N/A', 'backpack',
'umbrella', 'N/A', 'N/A', 'handbag', 'tie', 'suitcase', 'frisbee', 'skis',
'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove',
'skateboard', 'surfboard', 'tennis racket', 'bottle', 'N/A', 'wine glass',
'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple', 'sandwich',
'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake',
'chair', 'couch', 'potted plant', 'bed', 'N/A', 'dining table', 'N/A',
'N/A', 'toilet', 'N/A', 'tv', 'laptop', 'mouse', 'remote', 'keyboard',
'cell phone', 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'N/A',
'book', 'clock', 'vase', 'scissors', 'teddy bear', 'hair drier',
'toothbrush'
]
# colors for visualization
COLORS = [[0.000, 0.447, 0.741], [0.850, 0.325, 0.098], [0.929, 0.694, 0.125],
[0.494, 0.184, 0.556], [0.466, 0.674, 0.188], [0.301, 0.745, 0.933]]
# standard PyTorch mean-std input image normalization
transform = T.Compose([
T.Resize(800),
T.ToTensor(),
T.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
# for output bounding box post-processing
def box_cxcywh_to_xyxy(x):
x_c, y_c, w, h = x.unbind(1)
b = [(x_c - 0.5 * w), (y_c - 0.5 * h),
(x_c + 0.5 * w), (y_c + 0.5 * h)]
return torch.stack(b, dim=1)
def rescale_bboxes(out_bbox, size):
img_w, img_h = size
b = box_cxcywh_to_xyxy(out_bbox)
b = b * torch.tensor([img_w, img_h, img_w, img_h], dtype=torch.float32)
return b
def plot_results(pil_img, prob, boxes):
plt.figure(figsize=(16, 10))
plt.imshow(pil_img)
ax = plt.gca()
colors = COLORS * 100
for p, (xmin, ymin, xmax, ymax), c in zip(prob, boxes.tolist(), colors):
ax.add_patch(plt.Rectangle((xmin, ymin), xmax - xmin, ymax - ymin,
fill=False, color=c, linewidth=3))
cl = p.argmax()
text = f'{CLASSES[cl]}: {p[cl]:0.2f}'
ax.text(xmin, ymin, text, fontsize=15,
bbox=dict(facecolor='yellow', alpha=0.5))
plt.axis('off')
plt.show()
def detect(im, model, transform):
# mean-std normalize the input image (batch-size: 1)
img = transform(im).unsqueeze(0)
# demo model only support by default images with aspect ratio between 0.5 and 2
# if you want to use images with an aspect ratio outside this range
# rescale your image so that the maximum size is at most 1333 for best results
assert img.shape[-2] <= 1600 and img.shape[
-1] <= 1600, 'demo model only supports images up to 1600 pixels on each side'
# propagate through the model
outputs = model(img)
# keep only predictions with 0.7+ confidence
probas = outputs['pred_logits'].softmax(-1)[0, :, :-1]
keep = probas.max(-1).values > 0.7
# convert boxes from [0; 1] to image scales
bboxes_scaled = rescale_bboxes(outputs['pred_boxes'][0, keep], im.size)
return probas[keep], bboxes_scaled
class DETRdemo(nn.Module):
"""
Demo DETR implementation.
Demo implementation of DETR in minimal number of lines, with the
following differences wrt DETR in the paper:
* learned positional encoding (instead of sine)
* positional encoding is passed at input (instead of attention)
* fc bbox predictor (instead of MLP)
The model achieves ~40 AP on COCO val5k and runs at ~28 FPS on Tesla V100.
Only batch size 1 supported.
"""
def __init__(self, num_classes, hidden_dim=256, nheads=8,
num_encoder_layers=6, num_decoder_layers=6):
super().__init__()
# create ResNet-50 backbone
self.backbone = resnet50()
del self.backbone.fc
# create conversion layer
self.conv = nn.Conv2d(2048, hidden_dim, 1)
# create a default PyTorch transformer
self.transformer = nn.Transformer(
hidden_dim, nheads, num_encoder_layers, num_decoder_layers)
# prediction heads, one extra class for predicting non-empty slots
# note that in baseline DETR linear_bbox layer is 3-layer MLP
self.linear_class = nn.Linear(hidden_dim, num_classes + 1)
self.linear_bbox = nn.Linear(hidden_dim, 4)
# output positional encodings (object queries)
self.query_pos = nn.Parameter(torch.rand(100, hidden_dim))
# spatial positional encodings
# note that in baseline DETR we use sine positional encodings
self.row_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
self.col_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
def forward(self, inputs):
# propagate inputs through ResNet-50 up to avg-pool layer
x = self.backbone.conv1(inputs)
x = self.backbone.bn1(x)
x = self.backbone.relu(x)
x = self.backbone.maxpool(x)
x = self.backbone.layer1(x)
x = self.backbone.layer2(x)
x = self.backbone.layer3(x)
x = self.backbone.layer4(x)
# convert from 2048 to 256 feature planes for the transformer
h = self.conv(x)
# construct positional encodings
H, W = h.shape[-2:]
pos = torch.cat([
self.col_embed[:W].unsqueeze(0).repeat(H, 1, 1),
self.row_embed[:H].unsqueeze(1).repeat(1, W, 1),
], dim=-1).flatten(0, 1).unsqueeze(1)
# propagate through the transformer
h = self.transformer(pos + 0.1 * h.flatten(2).permute(2, 0, 1),
self.query_pos.unsqueeze(1)).transpose(0, 1)
# finally project transformer outputs to class labels and bounding boxes
return {'pred_logits': self.linear_class(h),
'pred_boxes': self.linear_bbox(h).sigmoid()}
if __name__ == "__main__":
detr = DETRdemo(num_classes=91)
state_dict = torch.hub.load_state_dict_from_url(
url='https://dl.fbaipublicfiles.com/detr/detr_demo-da2a99e9.pth',
map_location='cpu', check_hash=True)
detr.load_state_dict(state_dict)
detr.eval()
im = cv2.imread("test4.JPG")
im = cv2.cvtColor(im, cv2.COLOR_BGR2RGB)
im = Image.fromarray(im)
scores, boxes = detect(im, detr, transform)
plot_results(im, scores, boxes)
总结
这里再贴以下官方github:DETR
真的是非常贴心的开源代码!