Games101-课程22笔记
目录
第二十二节课: 动画与模拟-续集
单粒子模拟
常微分方程 (ODE)
求解粒子位置
欧拉法
欧拉方法 - 误差
欧拉方法 - 不稳定性
两个关键问题
解决欧拉法不稳定的方法
中点法
自适应步长
隐式欧拉法
如何判断/量化“稳定性”?
龙格库塔方法
基于位置/ Verlet 集成
刚体模拟
流体模拟
关键思想
拉格朗日vs欧拉
拉格朗日方法(也叫质点法)
欧拉法(也叫网格法)
材质点方法 (MPM)
第二十二节课: 动画与模拟-续集
① 单粒子模拟
• 显式欧拉法
• 不稳定和改进
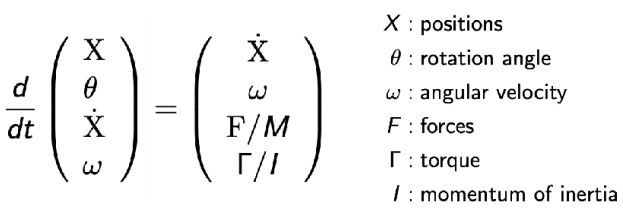
② 刚体模拟
③ 流体模拟
单粒子模拟
首次研究单个粒子的运动
• 稍后,推广到大量粒子
首先,假设粒子的运动由速度矢量场确定,该矢量场是位置和时间的函数:![]()
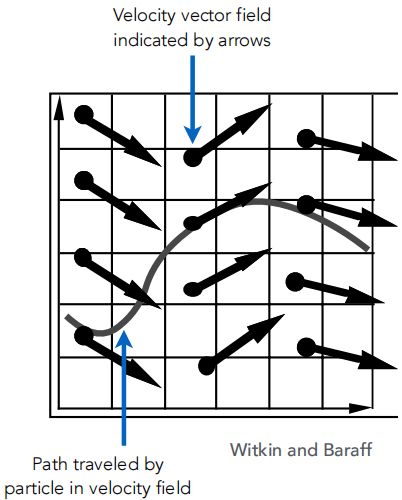
Velocity vector field indicated by arrows: 用箭头表示速度矢量场
Path traveled by particle in velocity field: 粒子在速度场中经过的路径
常微分方程 (ODE)
计算粒子随时间的位置需要求解一阶微分方程:

“一阶”是指所取的一阶导数
“常”表示没有“偏”导数,即 x 只是 t 的函数, 不是常数
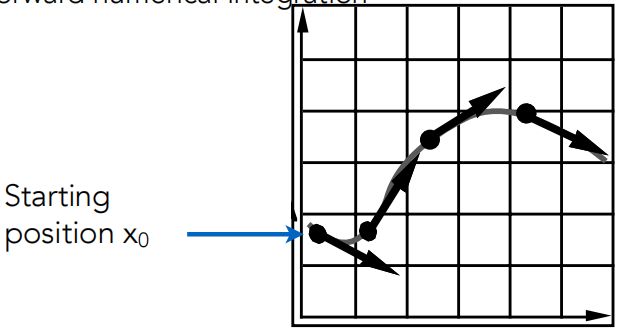
求解粒子位置
在给定初始粒子位置 x0 的情况下,我们可以通过使用正向数值积分来求解 ODE
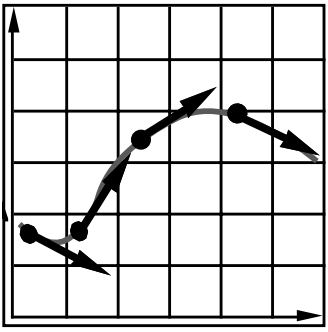
欧拉法
欧拉方法(又名正向欧拉,显式欧拉)
用上一帧的数据(位置,速度,加速度)算出下一帧的数据.
• 简单的迭代方法 • 常用
• 很不准确 • 常常不稳定

欧拉方法 - 误差
通过数值积分,误差会累积, 欧拉积分特别差

Solution path(需要模拟的路线)
Euler estimate with small time step : 步长小 Euler estimate with large time step : 步长大
 (步长)特别小, 越精确模拟.
(步长)特别小, 越精确模拟.
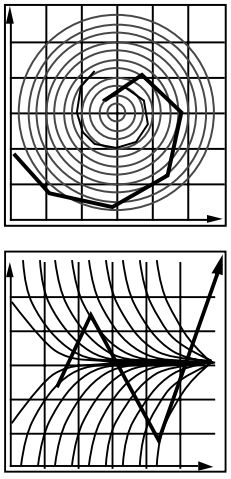
欧拉方法 - 不稳定性
![]()
两个关键问题:
① 随着时间步长 Δt 的增加,不准确度也会增加
② 不稳定是一个常见的严重问题,可能会导致模拟出现偏差
通过有限差分数值积分求解, 导致两个问题:
① 误差
• 每个时间步的误差累积。 精度随着模拟的进行而降低
• 精度在图形应用程序中可能并不重要
② 不稳定
• 误差可能会加剧,即使基础系统没有,也会导致模拟出现偏差
• 缺乏稳定性是仿真中的一个根本问题,不容忽视
解决不稳定的方法
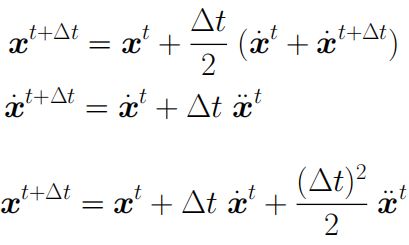
① 中点法/修正欧拉
• 起点和终点的平均速度
② 自适应改变步长方法
• 递归比较一步和两个半步,直到可以接受错误
③ 隐式方法
• 在下一个时间步使用速度(困难)
④ 基于位置 / Verlet 集成
• 在时间步之后约束粒子的位置和速度
中点法的具体步骤
• 计算欧拉步骤 (a)
• 计算中点的导数
欧拉步骤 (b)
• 使用中点更新位置
导数 (c)
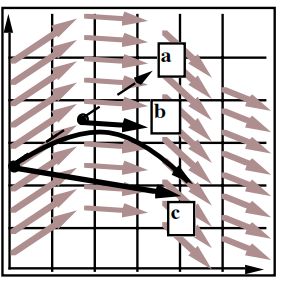
修正欧拉
• 步骤开始和结束时的平均速度
• 更好的结果
自适应步长
① 把一个欧拉步长为 分成两个欧拉步长为![]()
② 对前半步和后半步逐一进行欧拉法 ,得出最后的位置, 与一个欧拉步长的最终位置对比
③ 若小于误差阈值则无需继续细分步长, 若大于则继续细分
• 根据误差估计选择步长的技术
• 非常实用的技术
• 但可能需要非常小的步长!
重复直到错误低于阈值:
• 计算 xT 一个欧拉步长,大小为 T
• 计算 xT/2 两个欧拉步长,大小为 T/2
• 计算误差|| xT – xT/2 || , 如果(误差 > 阈值)减小步长并重试

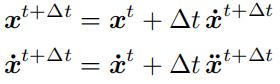
隐式欧拉法
隐式方法
• 非正式地称为后向方法
• 在当前步骤中使用未来的衍生产品
• 求解![]() 和
和![]() 的非线性问题
的非线性问题
• 使用寻根算法,例如 牛顿法
• 提供更好的稳定性
如何判断/量化“稳定性”?
• 我们使用局部截断误差(每一步)/总累积误差(整体)
• 绝对值无关紧要,但顺序与步长有关系
• 隐式欧拉的阶数为 1,这意味着
- 局部截断误差:![]()
- 全局截断误差:![]() (h 是步长,即 Δt)
(h 是步长,即 Δt)
• 对O(h) 的理解
- 如果我们将 h 减半,预期误差也会减半, 那么也就是阶数越高, 越能减小误差
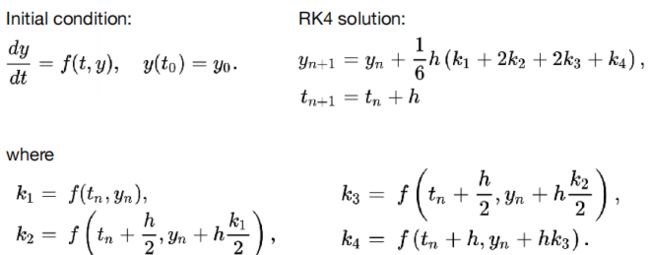
龙格库塔方法
求解 ODE 的一系列高级方法
• 特别擅长处理非线性
• 它的四阶版本是使用最广泛的版本,即 RK4
基于位置/ Verlet 集成
思想:
• 修改后的欧拉前步,约束粒子的位置以防止发散、不稳定的行为
• 使用受约束的位置来计算速度
• 这两种想法都会消耗能量,稳定
优点与缺点:
• 快速简单
• 不是基于物理的,无法消耗能量
刚体模拟
简单案例
• 类似于模拟粒子
• 只需考虑更多属性
流体模拟
一种简单的基于位置的方法
关键思想
• 假设水由小的刚体球体组成
• 假设水不能被压缩和拉伸(即恒定密度)
• 所以,只要某处的密度发生变化,就应该通过改变粒子的位置来“校正”
• 你需要知道任何地方的每个粒子的位置的密度梯度
• 更新? 只是梯度下降(机器学习)!
ps: 会出现粒子运动不停止的情况, 因为这是基于位置的方法, 没有能量损失. 所以需要优化方法, 例如加上人为的能量损失.
拉格朗日vs欧拉
模拟大量物体的两种不同视图
拉格朗日方法(也叫质点法)
比如要模拟一群鸟的运动, 对每一只都单独模拟其运动.

欧拉法(也叫网格法)
对空间进行网格划分, 在每个时刻的各个网格操作.
如果下图中鸟的位置没有错误: 那么鸟就是倒着飞(相对位置是参照上图), 因为是盯着一个网格查看鸟.

材质点方法 (MPM)
混合的,结合欧拉和拉格朗日观点
• 拉格朗日:考虑携带材质特性的粒子
• 欧拉:使用网格进行数值积分
• MPM:粒子将属性传递给网格,网格执行更新,然后插入回粒子