Eigen中几种表示三维位姿的方式以及相互转换
目录
一、位姿的表示方式
1. 普通4*4矩阵 Eigen::Matrix
2. 等距映射:Eigen::Isometry3d
二、旋转的表示方式与相互转换
1. 四元数的几种初始化方式
2. 旋转矩阵 -> 四元数
3. 欧拉角 -> 四元数
4. 四元数 -> 旋转矩阵
5. 四元数 -> 欧拉角
6. 旋转矩阵 -> 欧拉角
7. 欧拉角 -> 旋转矩阵
三、关于“旋转矩阵、欧拉角、轴角、四元数”之间的联系与思考
四、内旋与外旋
五、Eigen::eulerAngles(2,1,0)有大坑
一、位姿的表示方式
1. 普通4*4矩阵 Eigen::Matrix
Eigen::Matrix transformation = Eigen::Matrix::Identity(). 2. 等距映射:Eigen::Isometry3d
Eigen::Quaterniond quaternion;
// 依次旋转yaw, pitch, roll
// 即: R = R_z * R_y * R_x
quaternion = Eigen::AngleAxisd(yaw, Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(pitch, Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(roll, Eigen::Vector3d::UnitX());
Eigen::Isometry3d iso = Eigen::Translation3d(x, y, z) * quaternion;
Eigen::Matrix4d res = iso.matrix();二、旋转的表示方式与相互转换
1. 四元数的几种初始化方式
Eigen::Quaterniond quaternion;
// 从四个系数构造
Quaternion(const Scalar& w, const Scalar& x, const Scalar& y, const Scalar& z) : m_coeffs(x, y, z, w){}
// 从旋转矩阵构造
Quaternion(const MatrixBase& other) { *this = other; }
// 从四元数构造
Quaternion(const QuaternionBase& other) { this->Base::operator=(other); }
2. 旋转矩阵 -> 四元数
// 从旋转矩阵构造
Quaternion(const MatrixBase& other) { *this = other; }
Eigen::Matrix rot;
Eigen::Quaterniond qua(rot); 3. 欧拉角 -> 四元数
Eigen::Quaterniond quaternion;
// 依次旋转yaw, pitch, roll
// 即: R = R_z * R_y * R_x
quaternion = Eigen::AngleAxisd(yaw, Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(pitch, Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(roll, Eigen::Vector3d::UnitX());也可以通过如下方式直接矩阵公式直接计算:

4. 四元数 -> 旋转矩阵
QuaternionBase::toRotationMatrix(void) const;
Eigen::Quaterniond qua;
Eigen::Matrix rot = qua.toRotationMatrix(); 5. 四元数 -> 欧拉角
Eigen::Quaterniond qua;
// 按照yaw, pitch, roll的方式进行分解。即:
// euler(0) = yaw
// euler(1) = pitch
// euler(2) = roll
Eigen::Vector3d euler = qua.toRotationMatrix().eulerAngles(2, 1, 0);
return euler;6. 旋转矩阵 -> 欧拉角
// 按照yaw, pitch, roll的方式进行分解。即:
// euler(0) = yaw
// euler(1) = pitch
// euler(2) = roll
Eigen::Matrix3d m;
Eigen::Vector3d euler = m.eulerAngles(0, 1, 2);7. 欧拉角 -> 旋转矩阵
// 先转四元数, 再转旋转矩阵
// 依次旋转yaw, pitch, roll
// 即: R = R_z * R_y * R_x
Eigen::Quaterniond quaternion = Eigen::AngleAxisd(yaw, Eigen::Vector3d::UnitZ())*
Eigen::AngleAxisd(pitch, Eigen::Vector3d::UnitY())*
Eigen::AngleAxisd(roll, Eigen::Vector3d::UnitX());
Eigen::Matrix3d rot = quaternion.toRotationMatrix();三、关于“旋转矩阵、欧拉角、轴角、四元数”之间的联系与思考
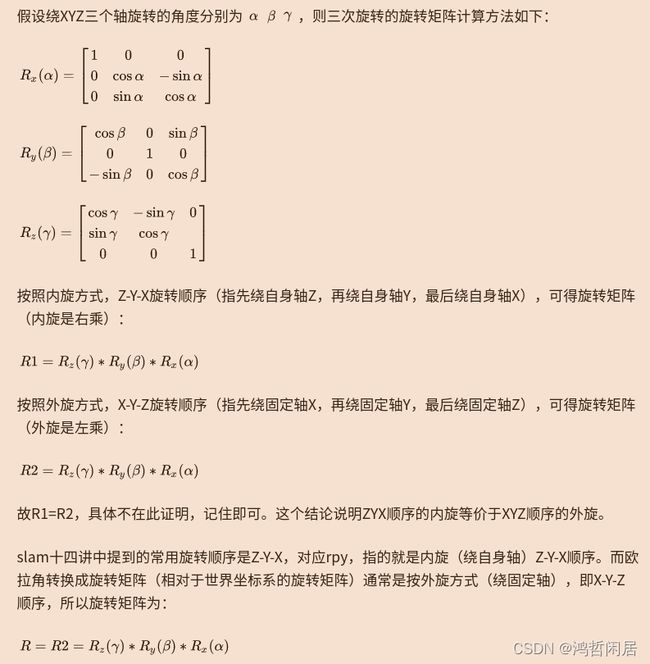
四、内旋与外旋
欧拉角和旋转矩阵之间的转换 - 知乎
五、Eigen::eulerAngles(2,1,0)有大坑
原文链接:https://blog.csdn.net/delovsam/article/details/104432185
普通的方法是,用Eigen,把四元数转成旋转矩阵,再从旋转矩阵转到欧拉角:
::Eigen::Quaterniond q(w, x, y, z);
::Eigen::Matrix3d rx = q.toRotationMatrix();
::Eigen::Vector3d ea = rx.eulerAngles(2,1,0);
但这个方法存在问题,即可能转出来的欧拉角,不是想要的,因为因为同一个四元数,可以用2个欧拉角来表示,而这个方法得到的结果有可能是用转角大于2PI的方式表达的。例如,四元数(0.00392036, -0.00511095, -0.613622, 0.789573)应当转为欧拉角(-1.32133, -0.00325971, 0.0124636),但用Eigen却被转成了(1.82026, -3.13833, -3.12913)。
由于无人车在近似平面上运动,因此yaw角可能取值±180°,roll和pitch变化很小才对。但是使用eulerAngles(2,1,0)时,出现roll,pitch达到正负180的现象,明显错误。如下图:

为了避免这个问题,有两种解决办法:
(1)方法一: 使用 Conversion between quaternions and Euler angles(https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles) 中给出的一个算法(如下),这个算法可以保证出来的欧拉角不会超过2PI。
#define _USE_MATH_DEFINES
#include
struct Quaternion {
double w, x, y, z;
};
struct EulerAngles {
double roll, pitch, yaw;
};
EulerAngles ToEulerAngles(Quaternion q) {
EulerAngles angles;
// roll (x-axis rotation)
double sinr_cosp = 2 * (q.w * q.x + q.y * q.z);
double cosr_cosp = 1 - 2 * (q.x * q.x + q.y * q.y);
angles.roll = std::atan2(sinr_cosp, cosr_cosp);
// pitch (y-axis rotation)
double sinp = 2 * (q.w * q.y - q.z * q.x);
if (std::abs(sinp) >= 1)
angles.pitch = std::copysign(M_PI / 2, sinp); // use 90 degrees if out of range
else
angles.pitch = std::asin(sinp);
// yaw (z-axis rotation)
double siny_cosp = 2 * (q.w * q.z + q.x * q.y);
double cosy_cosp = 1 - 2 * (q.y * q.y + q.z * q.z);
angles.yaw = std::atan2(siny_cosp, cosy_cosp);
return angles;
} (2)方法二:使用pcl::getTranslationAndEulerAngles()。但有的文章测试认为该函数在计算绕Z轴的旋转角时存在精度损失:pcl::getTranslationAndEulerAngles精度缺失问题_Eminbogen的博客-CSDN博客
但我觉得影响不大,同时LIO-Sam中也是用的这种方式。
#include
#include
float x, y, z, roll, pitch, yaw;
Eigen::Affine3f tmp(T_utm_lidar.cast());
pcl::getTranslationAndEulerAngles(tmp, x, y, z, roll, pitch, yaw); 使用pcl::getTranslationAndEulerAngles()方法的效果如下:
