目标检测篇-FPN论文精读
1、FPN网络结构
基于feature pyrimid来检测不同scale的object,共有4种思路

(a)使用图像金字塔构建特征金字塔,在每个图像尺度上独立计算的
(b)只使用单一尺度的特征
(c)重用由卷积神经网络计算的金字塔特征层次,仿佛它是一个特征图像金字塔。
(d)我们提出的特征金字塔网络(FPN)与(b)和(c)一样快,但更准确。
FPN-Structure:基于CNN固有的pyramid hierarchy,通过skip connection构建top-down path,仅需少量成本生成feature pyramid,并且feature pyramid的每个scale都具有high-level semantic feature,最终在feature pyramid的各个level上进行目标检测

FPN包含两个部分: 1、Bottom-up pathway 2、Top-down pathway and lateral connections
bottom-up path:
将backbone分为多个stage,将每个stage定义为1个pyramid level
输出:每个stage中,所有layer输出特征图的size是相同的,取其中最后1层的输出作为该stage的输出,因为每个stage中最深的层应该具有最强的特征
下采样:相邻stage之间的下采样比例为2
top-down path:
动机:high-level semantic information有助于识别目标但不利于定位目标,low-level spatial information有害于识别目标但有助于定位目标
构建:通过skip connection来构建top-down path
注:在开始top-down path之前,会在bottom-up path顶层使用1×1卷积生成较低分辨率的特征图
skip connection:
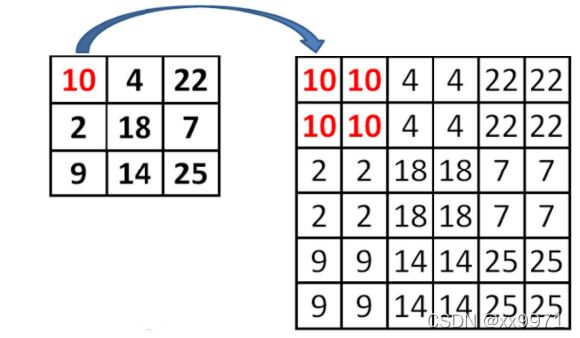
1、将来自top-down path的coarser-resolution feature map上采样。上采样比例为2,简单起见就使用nearest neighbor upsampling
2、使用1×1卷积减少来自bottom-up path的对应feature map的通道数
3、对上2步得到的2个feature map(size和channel数量都相同)进行element-wise addition
最近邻插值:
2、FPN-ResNet结构
本文将ResNet的后4个stage[C2.C3.C4.C5](相对于输入的下采样比例分别为4、8、16、32)的输出定义为4个pyramid level,不将第1个stage的输出包含到FPN中因为其内存占用量比较大。

3、在Faster RCNN中的应用
FPN应用于RPN:
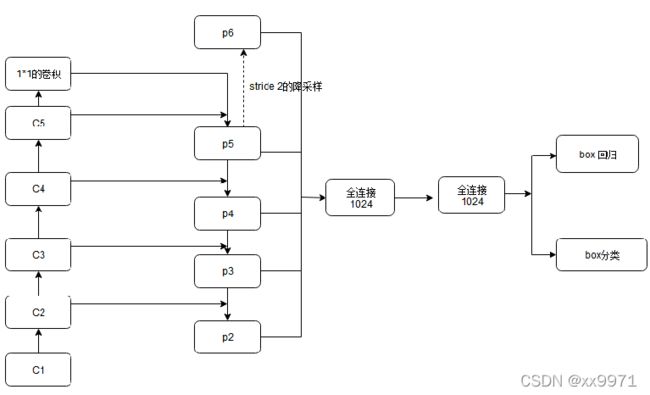
FPN输出:[P2,P3,P4,P5,P6],其中[P6]只是1个步长为2的下采样,引入它是为了覆盖更大的anchor scale [512*512] RPN结构:1个3×3卷积 + 2个并行1×1卷积
RPN输入:在5个pyramid level上,分别运行同1个RPN
anchor:5个level共有5×3=15种
anchor scale:引入FPN后,每个pyrimid level上的anchor就不需要是multi-scale的了。每个pyramid level上的anchor各只有1种scale,[P2,P3,P4,P5,P6]上anchor的scale分别为
纵横比:每个level上都有3个aspect ratio的anchor(1:2, 1:1, 2:1)
FPN for Fast RCNN

1个在input image上的size为(w,h)的RoI应该被分配到feature pyramid上的level Pk:

其中224为ImageNet的预训练size,k0是1个224×224的RoI应该被映射到的target pyramid level。 ResNet原文中的Faster RCNN使用C4作为RPN的输入,所以本文将k0设为4。
假如RoI的scale小于224×224(比如112×112,正好是224的一半),则它会被映射到像素数多的层(比如3)。
ResNet中使用conv5作为conv4输出的feature map顶部的head,但本文已经将conv5用于构建FPN。因此本文使用RoI pooling生成7×7的feature,然后用2个1024维的FC层+ReLU,然后再输入到最终的classification layer和BBox regression layer。相比于standard conv5 head,我们的方法参数更少、速度更快
4、Faster R-CNN+FPN细节图

FPN事实上不是一个独立的目标检测算法,而是相当于一个Backbone网络!