Halcon 进阶 三 C#实现 Halcon与工业相机(海康),视觉解析二维码
Halcon与工业相机(海康),视觉解析二维码
- 图像结果
- 工业相机连接
-
- 1.查找设备
- 2. 打开设备
- 3. 设置软触发
- 4. 设置硬触发
- 5. 开始拍照
- 6. 停止拍照
- halcon解码
-
- 1. 初始化
- 2. 设置解码模版
- 3. 设置窗体参数
- 4. 解码
- 软件操作
- 下载链接
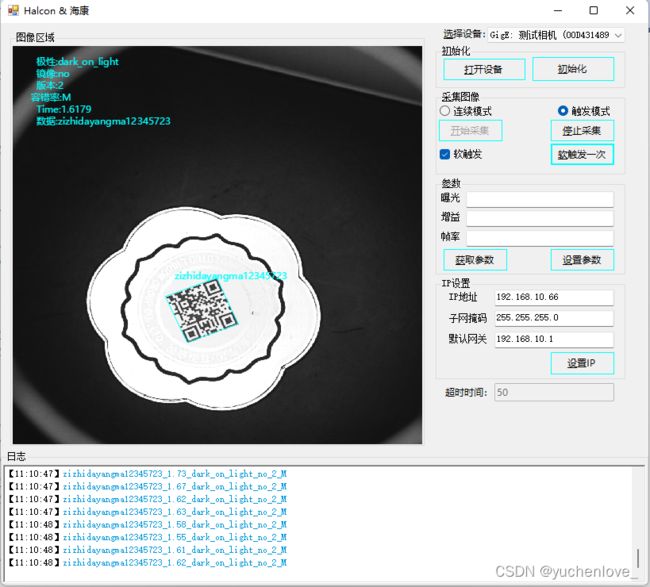
图像结果
工业相机连接
1.查找设备
public void Search_DeviceList()
{
int nRet;
// ch:创建设备列表 en:Create Device List
System.GC.Collect();
nRet = MyCamera.MV_CC_EnumDevices_NET(MyCamera.MV_GIGE_DEVICE | MyCamera.MV_USB_DEVICE, ref m_pDeviceList);
if (0 != nRet)
{
ShowErrorMsg("Enumerate devices fail!", 0);
return;
}
}
2. 打开设备
public bool Open()
{
if (null == m_pMyCamera)
{
m_pMyCamera = new MyCamera();
if (null == m_pMyCamera)
{
return false;
}
}
int nRet = -1;
nRet = m_pMyCamera.MV_CC_CreateDevice_NET(ref mDevice);
if (MyCamera.MV_OK != nRet)
{
return false;
}
nRet = m_pMyCamera.MV_CC_OpenDevice_NET();
if (MyCamera.MV_OK != nRet)
{
m_pMyCamera.MV_CC_DestroyDevice_NET();
return false;
}
// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)
if (mDevice.nTLayerType == MyCamera.MV_GIGE_DEVICE)
{
int nPacketSize = m_pMyCamera.MV_CC_GetOptimalPacketSize_NET();
if (nPacketSize > 0)
{
nRet = m_pMyCamera.MV_CC_SetIntValue_NET("GevSCPSPacketSize", (uint)nPacketSize);
if (nRet != MyCamera.MV_OK)
{
Console.WriteLine("Warning: Set Packet Size failed {0:x8}", nRet);
}
}
else
{
Console.WriteLine("Warning: Get Packet Size failed {0:x8}", nPacketSize);
}
}
// ch:获取包大小 || en: Get Payload Size
MyCamera.MVCC_INTVALUE stParam = new MyCamera.MVCC_INTVALUE();
nRet = m_pMyCamera.MV_CC_GetIntValue_NET("PayloadSize", ref stParam);
if (MyCamera.MV_OK != nRet)
{
return false;
}
g_nPayloadSize = stParam.nCurValue;
// ch:获取高 || en: Get Height
nRet = m_pMyCamera.MV_CC_GetIntValue_NET("Height", ref stParam);
if (MyCamera.MV_OK != nRet)
{
return false;
}
nHeight = stParam.nCurValue;
// ch:获取宽 || en: Get Width
nRet = m_pMyCamera.MV_CC_GetIntValue_NET("Width", ref stParam);
if (MyCamera.MV_OK != nRet)
{
return false;
}
nWidth = stParam.nCurValue;
m_pDataForRed = new byte[nWidth * nHeight];
m_pDataForGreen = new byte[nWidth * nHeight];
m_pDataForBlue = new byte[nWidth * nHeight];
m_pMyCamera.MV_CC_SetEnumValue_NET("TriggerMode", 1);//触发模式打开
m_pMyCamera.MV_CC_SetEnumValue_NET("TriggerSource", 0);//设置外部触发
return true;
}
3. 设置软触发
public void TriggerExec()
{
if (m_pMyCamera != null)
{
int nRet = m_pMyCamera.MV_CC_SetCommandValue_NET("TriggerSoftware");
if (MyCamera.MV_OK != nRet)
{
ShowErrorMsg("Trigger Fail", nRet);
}
}
}
4. 设置硬触发
public void SetTriggerMode(uint TriggerSource)
{
if (m_pMyCamera != null)
{
m_pMyCamera.MV_CC_SetEnumValue_NET("TriggerMode", 1);
m_pMyCamera.MV_CC_SetEnumValue_NET("TriggerSource", TriggerSource);
}
}
5. 开始拍照
public bool Start()
{
int nRet;
try
{
if (m_pMyCamera != null)
{
nRet = m_pMyCamera.MV_CC_StartGrabbing_NET();
if (MyCamera.MV_OK != nRet)
{
return false;
}
m_bGrabbing = true;
}
return false;
if (Show_Image)
{
nRet = m_pMyCamera.MV_CC_Display_NET(hWnd);
if (MyCamera.MV_OK != nRet)
{
ShowErrorMsg("显示失败", nRet);
}
}
}
catch (Exception ex)
{
}
return true;
}
6. 停止拍照
public bool Stop()
{
if (m_pMyCamera != null)
{
int nRet = -1;
// ch:停止采集 | en:Stop Grabbing
nRet = m_pMyCamera.MV_CC_StopGrabbing_NET();
if (nRet != MyCamera.MV_OK)
{
return false;
}
// ch:标志位设为false | en:Set flag bit false
m_bGrabbing = false;
}
return true;
}
halcon解码
1. 初始化
public HWindow Open_Window(IntPtr handle, int pbWidth, int pbHeight)
{
HTuple hWindowRow, hWindowColumn;
hWindowRow = 0;
hWindowColumn = 0;
HTuple hWindowID = (HTuple)handle;
hv_WindowHandle = new HWindow();
hv_WindowHandle.OpenWindow(hWindowRow, hWindowColumn, pbWidth, pbHeight, hWindowID, "visible", "");
return hv_WindowHandle;
}
2. 设置解码模版
public HTuple Create_QR_Code_Model()
{
hv_DataCodeHandle = new HTuple();
//创建第一个二维码模版
HOperatorSet.CreateDataCode2dModel("QR Code", "default_parameters", "maximum_recognition",
out hv_DataCodeHandle);
return hv_DataCodeHandle;
}
3. 设置窗体参数
///
/// 设置显示窗体参数
///
///
///
///
public void SetH_Window(HWindow hWindow, int vWidth, int vHeight)
{
HOperatorSet.SetWindowAttr("background_color", "black");
//set_display_font(hv_WindowHandle, 10, "mono", "false", "false");
HOperatorSet.SetLineWidth(hWindow, 1);
HOperatorSet.SetColor(hWindow, "cyan");
HDevWindowStack.Push(hWindow);
HOperatorSet.SetPart(hWindow, 0, 0, vHeight - 1, vWidth - 1);
}
4. 解码
public void get_reader_data_all_result(HObject ho_Image, out string decodeStrings, out string time, out string polarity, out string mirrored, out string version, out string error_correction_level
{
time = "0"; decodeStrings = ""; polarity = ""; mirrored = ""; version = "";
error_correction_level = "";
HObject ho_SymbolXLDs;
HTuple hv_T1 = new HTuple(), hv_ResultHandles = new HTuple(), hv_ResultMessage = null; ;
HTuple hv_DecodedDataStrings = new HTuple(), hv_T2 = new HTuple();
HTuple hv_Time = new HTuple();
HTuple hv_c = null, hv_ResultVariousValues = null;
HTuple hv_ResultVariousNames = new HTuple();
HTuple hv_ResultVariousNames_cn = new HTuple();
HOperatorSet.GenEmptyObj(out ho_SymbolXLDs);
//HOperatorSet.GetImageSize(ho_Image, out hv_Width, out hv_Height);
try
{
HOperatorSet.CountSeconds(out hv_T1);
ho_SymbolXLDs.Dispose();
HOperatorSet.FindDataCode2d(ho_Image, out ho_SymbolXLDs, hv_DataCodeHandle, new HTuple(),new HTuple(), out hv_ResultHandles, out hv_DecodedDataStrings);
decodeStrings = hv_DecodedDataStrings.Length == 0 ? "ERROR" : hv_DecodedDataStrings.S;
HOperatorSet.CountSeconds(out hv_T2);
hv_Time = 1000 * (hv_T2 - hv_T1);
//hv_ResultMessage = ("Time: " + (hv_Time.TupleString(".2f"))) + " ms";
time = hv_Time.TupleString(".2f");
hv_ResultMessage = "Time: " + time + " ms";
HOperatorSet.DispObj(ho_Image, hv_WindowHandle);
}
catch (Exception EX)
{
ho_SymbolXLDs.Dispose();
}
}
软件操作
打开软件,自动查找设备,依次点击 打开设备、初始化,然后点击开始采集。
连续模式:相机自动拍照返回照片,软件解码,
触发模式:不勾选软触发,是采用外部传感器触发。
勾选软触发,是点击后面 软件触发一次,相机拍照一次
下载链接
Halcon与工业相机(海康),视觉解析二维码