关于Aruco标记的理解并对其进行姿态估计的可视化显示
目录
- 1.什么是ArUco标记
-
- 1.1 Marker和字典
- 2.通过使用OpenCV生成ArUco标记图
- 3.检测Aruco标记
- 4.一些API的介绍
-
- getPredefinedDictionary()
- drawMarker()
- estimatePoseSingleMarkers()
- 5.ArUco模块之aruco标记的创建与检测
- 6.对aruco标记进行姿态估计的可视化显示
ArUco二维码标定板自动生成网站:
https://chev.me/arucogen/
可以选择Aruco码、棋盘格标定板、圆形标定板、非对称圆形标定板进行打印
https://calib.io/pages/camera-calibration-pattern-generator
1.什么是ArUco标记
ArUco标记最初由S.Garrido-Jurado等人在2014年发表的论文Automatic generation and detection of highly reliable fiducial markers under occlusion中提出。ArUco的全称是Augmented Reality University of Cordoba,下面给出ArUco标记的一些示例。

ArUco标记是可用于摄像机姿态估计的二进制方形基准标记。它的主要优点是检测简单、快速,并且具有很强的鲁棒性。ArUco 标记是由宽黑色边框和确定其标识符(id)的内部二进制矩阵组成的正方形标记。ArUco标记的黑色边框有助于其在图像中的快速检测,内部二进制编码用于识别标记和提供错误检测和纠正。ArUco标记尺寸的大小决定内部矩阵的大小,例如尺寸为 4x4 的标记由 16 位二进制数组成。
ArUco标记的尺寸可以任意的更改,为了成功检测可根据对象大小和场景选择合适的尺寸。在实际使用中,如果标记的尺寸太小,可能无法检测到它,这时可以选择更换较大尺寸的标记,或者将相机离标记更近一些。
在机器人应用中,可以将这些标记沿着仓库机器人的路径放置。当安装在机器人上的摄像头检测到这些标记时,由于每个标记都有唯一的ID,并且且标记在仓库中的放置位置已知,因此就可以知道机器人在仓库中的精确位置。
通俗地说,Aruco标记其实就是一种编码,就和我们日常生活中的二维码是相似的,只不过由于编码方式的不同,导致它们存储信息的方式、容量等等有所差异,所以在应用层次上也会有所不同。由于单个ArUco标记就可以提供足够的对应关系,例如有四个明显的角点及内部的二进制编码,所以ArUco标记被广泛用来增加从二维世界映射到三维世界时的信息量,便于发现二维世界与三维世界之间的投影关系,从而实现姿态估计、相机矫正等等应用。
1.1 Marker和字典
一个ArUco marker是一个二进制平方标记,它由一个宽的黑边和一个内部的二进制矩阵组成,内部的矩阵决定了它们的id。黑色的边界有利于快速检测到图像,二进制编码可以验证id,并且允许错误检测和矫正技术的应用。marker的大小决定了内部矩阵的大小。例如,一个4x4的marker由16bits组成。
2.通过使用OpenCV生成ArUco标记图
本小节通过使用OpenCV库生成上小节中的ArUco标记图,方便打印后为后面做姿态估计。
使用OpenCV可轻松生成这些标记。OpenCV中的Aruco模块总共有25个预定义的标记词典。每个词典中所有的Aruco标记均包含相同数量的块或位(例如4×4、5×5、6×6或7×7),且每个词典中Aruco标记的数量固定(例如50、100、250或1000)。接下来将展示如何在C++和Python中生成和检测各种aruco标记。
调用getPredefinedDictionary()函数加载包含250个标记的字典,其中每个标记都是6×6位二进制模式。具体代码在下面给出。
C++代码
#include Python代码
import cv2 as cv
import numpy as np
# 加载用于生成标记的字典
dictionary = cv.aruco.Dictionary_get(cv.aruco.DICT_6X6_250)
# Generate the marker
markerImage = np.zeros((200, 200), dtype=np.uint8)
markerImage = cv.aruco.drawMarker(dictionary, 33, 200, markerImage, 1);
cv.imwrite("marker33.png", markerImage);
代码中drawMarker函数可以从由250个aruco标记组成的集合中选择给定id(第二个参数– 33)的标记,这250个标记的id由0~249表示。drawMarker函数的第三个参数决定生成的标记的大小,在上面的示例中,它将生成200×200像素的图像。第四个参数表示将要存储aruco标记的对象(上面的markerImage)。最后,第五个参数是边界宽度参数,它决定应将多少位(块)作为边界添加到生成的二进制图案中。
在上面的代码中,将在6×6生成的图形周围添加1位的边界,以在200×200像素的图像中生成7×7位的图像。上述代码生成的aruco标记如下图所示。

在实际应用时,我们可能需要生成多个标记。之后我们只需要将这些标记打印出来就可以直接使用了。
3.检测Aruco标记
将aruco标记放置在环境中后,我们需要检测它们并将其用于进一步处理。接下来介绍如何通过代码检测标记。
C++代码
// 加载用于生成标记的字典
Ptr<Dictionary> dictionary = getPredefinedDictionary(DICT_6X6_250);
// 使用默认值初始化检测器参数
Ptr<DetectorParameters> parameters = DetectorParameters::create();
// 声明包含检测到的标记角和被拒绝的标记候选的向量
vector<vector<Point2f>> markerCorners, rejectedCandidates;
// 检测到的标记的id存储在一个向量中
vector<int> markerIds;
// 检测图像中的标记
detectMarkers(frame, dictionary, markerCorners, markerIds, parameters, rejectedCandidates);
Python代码
# 加载用于生成标记的字典
dictionary = cv.aruco.Dictionary_get(cv.aruco.DICT_6X6_250)
# 使用默认值初始化检测器参数
parameters = cv.aruco.DetectorParameters_create()
# 检测图像中的标记
markerCorners, markerIds, rejectedCandidates = cv.aruco.detectMarkers(frame, dictionary, parameters=parameters)
对于每次成功检测到标记,将按从左上,右上,右下和左下的顺序检测标记的四个角点。在C ++中,将这4个检测到的角点存储为点矢量,并将图像中的多个标记一起存储在点矢量容器中。在Python中,它们存储为Numpy 数组。
4.一些API的介绍
姿态估计问题就是要确定某个三维物体的方位指向问题,也就是确定以该物体为中心原点的一个坐标系。
getPredefinedDictionary()
auto dictionary = aruco::getPredefinedDictionary(aruco::PREDEFINED_DICTIONARY_NAME::DICT_6X6_250);
- 关于DICT_4X4_50含义
以我的运行环境opencv3.4.7和opencv_contrib为例,其中DICT是dictionary的缩写,6×6表示去掉一个宽的黑边后的网格大小,如下图所示是6×6的,蓝色的矩形框所示。
50表示每个字典中的Marker数目,有效的id数字范围是0到49。不在有效区间的特定id将会产生异常。

上图为一个典型的ArUco marker,去除黑色边框后为6X6的格子(黑色表示0,白色表示1),6X6的格子的外边缘为黑色。
id的计算方法:
1 0 0 1 1 0
1 0 0 0 1 1
0 0 0 0 0 1
0 0 0 1 1 1
1 1 0 0 1 1
0 1 1 1 1 0
每行组成一个二进制数,将这6个二进制数进行相加转换为十进制,就是id。
enum PREDEFINED_DICTIONARY_NAME {
DICT_4X4_50 = 0,
DICT_4X4_100,
DICT_4X4_250,
DICT_4X4_1000,
DICT_5X5_50,
DICT_5X5_100,
DICT_5X5_250,
DICT_5X5_1000,
DICT_6X6_50,
DICT_6X6_100,
DICT_6X6_250,
DICT_6X6_1000,
DICT_7X7_50,
DICT_7X7_100,
DICT_7X7_250,
DICT_7X7_1000,
DICT_ARUCO_ORIGINAL,
DICT_APRILTAG_16h5, ///< 4x4 bits, minimum hamming distance between any two codes = 5, 30 codes
DICT_APRILTAG_25h9, ///< 5x5 bits, minimum hamming distance between any two codes = 9, 35 codes
DICT_APRILTAG_36h10, ///< 6x6 bits, minimum hamming distance between any two codes = 10, 2320 codes
DICT_APRILTAG_36h11 ///< 6x6 bits, minimum hamming distance between any two codes = 11, 587 codes
};
注: marker corner的顺序是起点为左上角, 顺时针
注: DICT_ARUCO_ORIGINAL: 为DICT_5X5_1024
drawMarker()
- 函数作用:detectMarkers函数用于检测和确定标记角点的位置。
cv::Mat markerImage;
cv::aruco::Dictionary dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
cv::aruco::drawMarker(dictionary, 23, 200, markerImage, 1);
首先,我们通过选择aruco模块中一个预定义的字典来创建一个字典对象,具体而言,这个字典是由250个marker组成的,每个marker的大小为6x6bits(DICT_6X6_250)
drawMarker的参数如下:
- 第一个参数是之前创建的字典对象(带有标记的场景图像)。
- 第二个参数是marker的id(用于生成标记的字典),成功检测到的标记将存储在markerCorners中,在这个例子中选择的是字典DICT_6X6_250第23个marker。注意到每个字典是由不同数目的Marker组成的,在这个例子中,有效的Id数字范围是0到249。不在有效区间的特定id将会产生异常。
- 第三个参数,200,是输出Marker图像的大小。在这个例子中,输出的图像将是200x200像素大小。注意到这一参数需要满足能够存储特定字典 的所有位。所以,举例而言,你不能为6x6大小的marker生成一个5x5图像(这还没有考虑到Marker的边界)。除此之外,为了避免变形,这一参数最好和位数+边界的大小成正比,至少要比marker的大小大得多(如这个例子中的200),这样变形就不显著了。
- 第四个参数是输出的图像。
- 最后一个参数是一个可选的参数,它指定了Marker黑色边界的大小。这一大小与位数数目成正比。例如,值为2意味着边界的宽度将会是2的倍数。默认的值为1。
生成的图像如下:
estimatePoseSingleMarkers()
cv::aruco::estimatePoseSingleMarkers(v_marker_corner, marker_size, cameraMatrix, distCoeffs, rvecs, tvecs);
- 函数作用:估计marker在相机坐标系中的3D位姿。
参数: - 第一个参数:
- 第二个参数:marker的尺寸
- 第三个参数:相机的内参矩阵
- 第四个参数:相机的畸变系数
- 第五个参数:输出marker坐标系到相机坐标系的旋转变换矩阵R
- 第六个参数:输出marker坐标系到相机坐标系的旋转变换矩阵T
注: marker坐标系用marker的位置有关, z轴向外。
5.ArUco模块之aruco标记的创建与检测
特别感谢这篇博文:
OpenCV4学习笔记(72)——ArUco模块之aruco标记的创建与检测
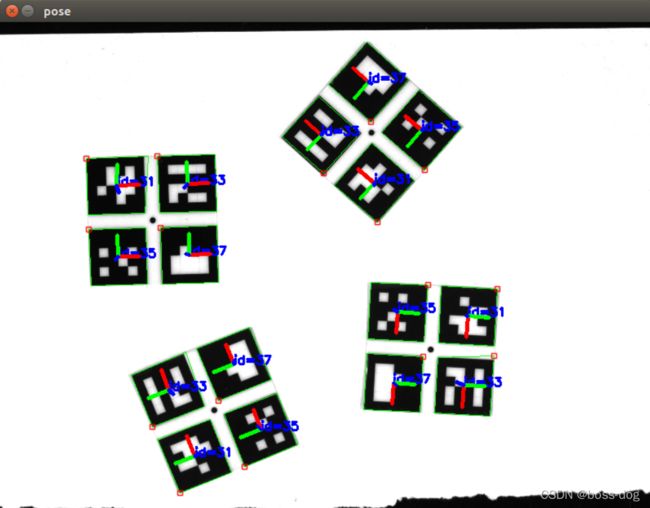
6.对aruco标记进行姿态估计的可视化显示
void detectPoseShow()
{
// step 1: 加载当前搭载相机的内参矩阵和畸变系数
cv::Mat cameraMatrix, distCoeffs;
std::vector<double> camera = { 5421.4770, 0, 1268.5471, 0, 5443.9587,
900.4128, 0, 0, 1 };
cameraMatrix = cv::Mat(camera);
cameraMatrix = cameraMatrix.reshape(1, 3);
std::vector<double> dist = { -0.07785, -0.92021, -0.00303, 0.000363,
31.54394 };
distCoeffs = cv::Mat(dist);
distCoeffs = distCoeffs.reshape(1, 1);
cv::Mat src_image = cv::imread("aruco.bmp");
// step 2: 对标记图像都进行aruco标记的检测以及姿态估计
cv::Mat test_image;
cv::resize(src_image, test_image, cv::Size(800, 600));
cv::imshow("test_image", test_image);
auto dictionary = cv::aruco::getPredefinedDictionary(
cv::aruco::PREDEFINED_DICTIONARY_NAME::DICT_4X4_50);
std::vector<std::vector<cv::Point2f>> corners, rejectedImgPoints;
std::vector<int> ids;
auto parameters = cv::aruco::DetectorParameters::create();
cv::aruco::detectMarkers(test_image, dictionary, corners, ids, parameters,
rejectedImgPoints);
cv::aruco::drawDetectedMarkers(test_image, corners, ids,
cv::Scalar(0, 255, 0));
std::vector<cv::Vec3d> rvecs;
std::vector<cv::Vec3d> tvecs;
cv::aruco::estimatePoseSingleMarkers(corners, 0.053, cameraMatrix,
distCoeffs, rvecs, tvecs);
// step 3: 绘制坐标轴并进行可视化显示
for (int i = 0; i < rvecs.size(); i++) {
cv::aruco::drawAxis(test_image, cameraMatrix, distCoeffs, rvecs[i],
tvecs[i], 0.02);
}
cv::imshow("pose", test_image);
}
效果:
个人觉得不错的博文:
增强现实应用:https://blog.csdn.net/sinat_17456165/article/details/105649131
OpenCV4学习笔记(74)——ArUco模块之对aruco标记进行实时姿态估计
OpenCV4学习笔记(76)——基于ArUco模块+QT实现增强现实(AR)
https://blog.csdn.net/weixin_45224869/article/month/2020/05
OpenCV官方文档:https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html
使用opencv的aruco库进行位姿估计:https://blog.csdn.net/weixin_43053387/article/details/86301547
视觉标记定位aruco使用:https://blog.csdn.net/sinat_16643223/article/details/114252467
marker中的id计算:https://blog.csdn.net/sinat_16643223/article/details/114261925
ArUco使用:https://blog.csdn.net/sinat_16643223/article/details/115212935
对于ArUco标记的检测,并将坐标轴可视化:https://blog.csdn.net/qq_53457019/article/details/125811861