SLAM14-3讲
SLAM14-3讲
一、实践Eigen
1.环境
# 若安装速度慢可以在网络配置中更换软件源,选择最为合适的软件源
sudo apt-get install libeigen3-dev
# 更新
sudo updatedb
# 定位Eigen3库安装位置
locate eigen3
# 定位eigen3库头文件位置
/usr/local/include/eigen3
注: Eigen库只有头文件,因此不需要在Cmake中使用target_link_libraries程序链接至库上
2.代码
#include ,即三维向量
Eigen::Vector3d v_3d;
// 这是一样的
Eigen::Matrix<float,3,1> vd_3d;
// Matrix3d 实质上是 Eigen::Matrix result_wrong_type = matrix_23 * v_3d;
// 应该显式转换
Eigen::Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;
cout << result << endl;
// 随机数矩阵
matrix_33 = Eigen::Matrix3d::Random();
cout << matrix_33 << endl;
cout << matrix_33.transpose() << endl; // 转置
cout << matrix_33.sum() << endl; // 各元素和
cout << matrix_33.trace() << endl; // 迹
cout << 10 * matrix_33 << endl; // 数乘
cout << matrix_33.inverse() << endl; // 逆
cout << matrix_33.determinant() << endl; // 行列式
// 特征求解1
// 实对称矩阵可以保证对角化成功(实对此矩阵是对角化的充分条件)
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> eigen_solver ( matrix_33.transpose()*matrix_33 );// 自伴随特征求解
cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;
cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;
// 特征求解2
Eigen::EigenSolver<Eigen::Matrix3d> eigen_solve_2(matrix_33.transpose() * matrix_33);
cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;
cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;
// 解方程
// 求解 matrix_NN * x = v_Nd 这个方程
// MATRIX_SIZE 大小在前边的宏里定义,它由随机数生成
Eigen::Matrix< double, MATRIX_SIZE, MATRIX_SIZE > matrix_NN;
matrix_NN = Eigen::MatrixXd::Random( MATRIX_SIZE, MATRIX_SIZE );//随机数矩阵
Eigen::Matrix< double, MATRIX_SIZE, 1> v_Nd;
v_Nd = Eigen::MatrixXd::Random( MATRIX_SIZE,1 );
clock_t time_stt = clock(); // 计时
// 直接求逆 (最直接的,但是求逆运算量大) x = (matrix_NN)-1 * v_Nd;
Eigen::Matrix<double,MATRIX_SIZE,1> x = matrix_NN.inverse()*v_Nd;
cout <<"time use in normal inverse is " << 1000* (clock() - time_stt)/(double)CLOCKS_PER_SEC << "ms"<< endl;
// cout << x.transpose() <
// 通常用矩阵分解来求,例如QR分解,速度会快很多
time_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout <<"time use in Qr decomposition is " <<1000* (clock() - time_stt)/(double)CLOCKS_PER_SEC <<"ms" << endl;
return 0;
}
3.CMakeLists.txt
# Cmake最低版本要求
cmake_minimum_required(VERSION 3.20)
# 项目名称
project(ch3)
# C++ 标准
set(CMAKE_CXX_STANDARD 14)
# 单配置生成器CMAKE_BUILD_TYPE 控制生成构建系统使用的配置变量 是 CMAKE_BUILD_TYPE 。该变量默认为空,CMake识别的值为:
# Debug:用于在没有优化的情况下,使用带有调试符号构建库或可执行文件。
# Release:用于构建的优化的库或可执行文件,不包含调试符号。
# RelWithDebInfo:用于构建较少的优化库或可执行文件,包含调试符号。
# MinSizeRel:用于不增加目标代码大小的优化方式,来构建库或可执行文件。
set( CMAKE_BUILD_TYPE "Release" )
# CMAKE_CXX_FLAGS变量针对C++编译器,后设置参数-O[n]可优化源代码
set( CMAKE_CXX_FLAGS "-O3" )
# 添加Eigen头文件
include_directories( "/usr/local/include/eigen3" )
# 添加可执行文件(程序名 源代码)
add_executable(useEigen main.cpp)
4.运行结果
/home/zxz/my_slam14/ch3/useEigen/cmake-build-debug/useEigen
1 2 3
4 5 6
1 2 3
4 5 6
10
28
0.680375 0.59688 -0.329554
-0.211234 0.823295 0.536459
0.566198 -0.604897 -0.444451
0.680375 -0.211234 0.566198
0.59688 0.823295 -0.604897
-0.329554 0.536459 -0.444451
1.61307
1.05922
6.80375 5.9688 -3.29554
-2.11234 8.23295 5.36459
5.66198 -6.04897 -4.44451
-0.198521 2.22739 2.8357
1.00605 -0.555135 -1.41603
-1.62213 3.59308 3.28973
0.208598
Eigen values =
0.0242899
0.992154
1.80558
Eigen vectors =
-0.549013 -0.735943 0.396198
0.253452 -0.598296 -0.760134
-0.796459 0.316906 -0.514998
Eigen values =
0.0242899
0.992154
1.80558
Eigen vectors =
-0.549013 -0.735943 0.396198
0.253452 -0.598296 -0.760134
-0.796459 0.316906 -0.514998
time use in normal inverse is 0.127ms
time use in Qr decomposition is 0.08ms
进程已结束,退出代码为 0
二、Eigen集合模块Geometry
1.代码
#include 2.CMakeLists.txt
cmake_minimum_required(VERSION 3.16)
project(useGeometry)
set(CMAKE_CXX_STANDARD 14)
# 添加头文件
include_directories("/usr/local/include/eigen3")
add_executable(useGeometry main.cpp)
3.运行结果
/home/zxz/my_slam14/ch3/useGeometry/cmake-build-debug/useGeometry
rotation_vector =
0.707 -0.707 0
0.707 0.707 0
0 0 1
rotation_matrix =
0.707 -0.707 0
0.707 0.707 0
0 0 1
(1,0,0) after roation = 0.707 0.707 0
(1,0,0) after roation = 0.707 0.707 0
yaw pitch roll = 0.785 -0 0
Transform matrix =
0.707 -0.707 0 1
0.707 0.707 0 3
0 0 1 4
0 0 0 1
v transformed = 1.71 3.71 4
quaternion =
0
0
0.383
0.924
quaternion =
0
0
0.383
0.924
(1,0,0) after rotation = 0.707 0.707 0
进程已结束,退出代码为 0
三、测试四元数的使用
注意:
四元数使用前需要进行归一化,即对四元数进行单位化,单位四元数表示三维空间中的任意旋转:
a.类似于 二维平面的复数,可表示2D的旋转与缩放,对复数进行单位化之后,则该复数缩放效果则为1倍,即没有缩放效果,只留下旋转
b.若不对四元数进行归一化,得到的旋转矩阵可能非正交
要求:
题目要求在slam14讲第二版书中P64
1.代码
#include 2.CMakeLists.txt
cmake_minimum_required(VERSION 3.20)
project(test)
set(CMAKE_CXX_STANDARD 14)
include_directories("/usr/local/include/eigen3")
add_executable(test main.cpp)
3.运行结果
/home/zxz/my_slam14/ch3/test/cmake-build-debug/test
q1 对应的旋转矩阵:
0.238095 0.190476 0.952381
0.72381 0.619048 -0.304762
-0.647619 0.761905 0.00952381
q1 对应的旋转矩阵的转置:
0.238095 0.72381 -0.647619
0.190476 0.619048 0.761905
0.952381 -0.304762 0.00952381
q1 对应的旋转矩阵的逆:
0.238095 0.72381 -0.647619
0.190476 0.619048 0.761905
0.952381 -0.304762 0.00952381
q2 对应的旋转矩阵:
0.782609 0.26087 0.565217
-0.608696 0.130435 0.782609
0.130435 -0.956522 0.26087
q2 对应的旋转矩阵的转置:
0.782609 -0.608696 0.130435
0.26087 0.130435 -0.956522
0.565217 0.782609 0.26087
q2 对应的旋转矩阵的逆:
0.782609 -0.608696 0.130435
0.26087 0.130435 -0.956522
0.565217 0.782609 0.26087
坐标p1在小萝卜二号坐标系下的坐标:
-0.0309731 0.73499 0.296108
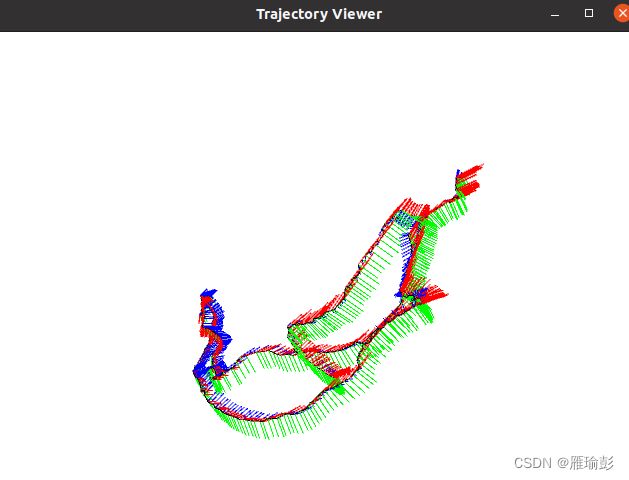
四、显示运动轨迹
1.环境配置
// 将slambook下3rdparty下的Pangolin.tar.gz进行解压
// 进入解压的文件
cd [path-to-pangolin]
mkdir build
cd build
cmake ..
make
报错:
home/zxz/Downloads/Pangolin/include/pangolin/video/drivers/ffmpeg.h:94:5: error: ‘PixelFormat’ does not name a type; did you mean ‘AVPixelFormat’?
94 | PixelFormat fmtout;
| ^~~~~~~~~~~
| AVPixelFormat
/home/zxz/Downloads/Pangolin/include/pangolin/video/drivers/ffmpeg.h:142:5: error: ‘PixelFormat’ does not name a type; did you mean ‘AVPixelFormat’?
142 | PixelFormat fmtsrc;
| ^~~~~~~~~~~
| AVPixelFormat
/home/zxz/Downloads/Pangolin/include/pangolin/video/drivers/ffmpeg.h:143:5: error: ‘PixelFormat’ does not name a type; did you mean ‘AVPixelFormat’?
143 | PixelFormat fmtdst;
| ^~~~~~~~~~~
| AVPixelFormat
解决报错:
// 在pangolin/src文件夹下,找到CMakeLists.txt文件,打开,并在266行将以下代码注释。
find_package(FFMPEG QUIET)
if(BUILD_PANGOLIN_VIDEO AND FFMPEG_FOUND)
set(HAVE_FFMPEG 1)
list(APPEND INTERNAL_INC ${FFMPEG_INCLUDE_DIRS} )
list(APPEND LINK_LIBS ${FFMPEG_LIBRARIES} )
list(APPEND HEADERS ${INCDIR}/video/drivers/ffmpeg.h)
list(APPEND SOURCES video/drivers/ffmpeg.cpp)
message(STATUS "ffmpeg Found and Enabled")
endif()
// 删除之前的build目录,重新创建,重新cmake
注意:下载高博的slambook2源码:
git clone https://github.com/gaoxiang12/slambook2
2.代码
参考文章:
https://blog.csdn.net/Ai_July/article/details/104929300
https://blog.csdn.net/weixin_43991178/article/details/105119610
// main.cpp
#include 3.CMakeLists.txt
cmake_minimum_required(VERSION 3.20)
project(examples)
set(CMAKE_CXX_STANDARD 14)
include_directories("/usr/local/include/eigen3")
# 添加pangolin依赖
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
add_executable(plotTrajectory main.cpp)
target_link_libraries(plotTrajectory ${Pangolin_LIBRARIES})
4.运行效果