ransac点云分割matlab代码,PCL—点云分割(RanSaC)低层次点云处理
博客转载自:http://blog.csdn.net/app_12062011/article/details/78131318
点云分割
点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势的体现。
点云分割的目的提取点云中的不同物体,从而实现分而治之,突出重点,单独处理的目的。而在现实点云数据中,往往对场景中的物体有一定先验知识。比如:桌面墙面多半是大平面,桌上的罐子应该是圆柱体,长方体的盒子可能是牛奶盒......对于复杂场景中的物体,其几何外形可以归结于简单的几何形状。这为分割带来了巨大的便利,因为简单几何形状是可以用方程来描述的,或者说,可以用有限的参数来描述复杂的物体。而方程则代表的物体的拓扑抽象。于是,RanSaC算法可以很好的将此类物体分割出来。
RanSaC算法
RanSaC算法(随机采样一致)原本是用于数据处理的一种经典算法,其作用是在大量噪声情况下,提取物体中特定的成分。下图是对RanSaC算法效果的说明。图中有一些点显然是满足某条直线的,另外有一团点是纯噪声。目的是在大量噪声的情况下找到直线方程,此时噪声数据量是直线的3倍。
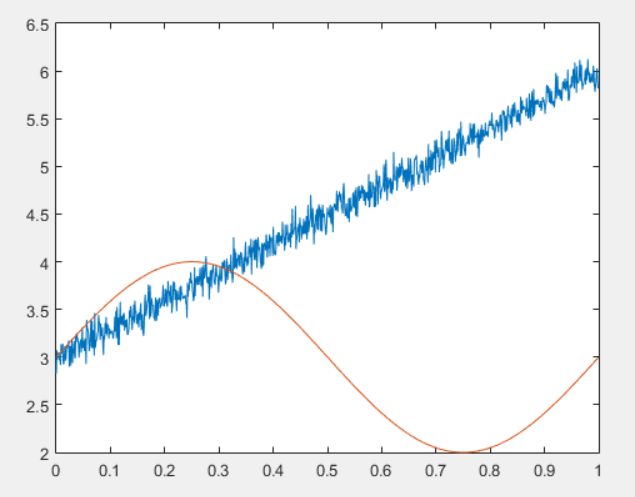
如果用最小二乘法是无法得到这样的效果的。关于随机采样一致性算法的原理,在wiki百科上讲的很清楚,甚至给出了伪代码和matlab,C代码。见网址https://en.wikipedia.org/wiki/RANSAC. 我想换一个不那么严肃或者说不那么学术的方式来解释这个算法。
实际上这个算法就是从一堆数据里挑出自己最心仪的数据。所谓心仪当然是有个标准(目标的形式:满足直线方程?满足圆方程?以及能容忍的误差e)。平面中确定一条直线需要2点,确定一个圆则需要3点。随机采样算法,其实就和小女生找男朋友差不多。
1.从人群中随便找个男生,看看他条件怎么样,然后和他谈恋爱,(平面中随机找两个点,拟合一条直线,并计算在容忍误差e中有多少点满足这条直线)
2.第二天,再重新找个男生,看看他条件怎么样,和男朋友比比,如果更好就换新的(重新随机选两点,拟合直线,看看这条直线是不是能容忍更多的点,如果是则记此直线为结果)
3.第三天,重复第二天的行为(循环迭代)
4.终于到了某个年龄,和现在的男朋友结婚(迭代结束,记录当前结果)
显然,如果一个女生按照上面的方法找男朋友,最后一定会嫁一个好的(我们会得到心仪的分割结果)。只要这个模型在直观上存在,该算法就一定有机会把它找到。优点是噪声可以分布的任意广,噪声可以远大于模型信息。
这个算法有两个缺点,第一,必须先指定一个合适的容忍误差e。第二,必须指定迭代次数作为收敛条件。
综合以上特性,本算法非常适合从杂乱点云中检测某些具有特殊外形的物体。
PCL中基于RanSaC的点云分割方法
PCL支持了大量几何模型的RanSaC检测,可以非常方便的对点云进行分割。其调用方法如
//创建一个模型参数对象,用于记录结果
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
//inliers表示误差能容忍的点 记录的是点云的序号
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
// 创建一个分割器
pcl::SACSegmentation<:pointxyz> seg;
// Optional
seg.setOptimizeCoefficients (true);
// Mandatory-设置目标几何形状
seg.setModelType (pcl::SACMODEL_PLANE);
//分割方法:随机采样法
seg.setMethodType (pcl::SAC_RANSAC);
//设置误差容忍范围
seg.setDistanceThreshold (0.01);
//输入点云
seg.setInputCloud (cloud);
//分割点云
seg.segment (*inliers, *coefficients);
除了平面以外,PCL几乎支持所有的几何形状。作为点云分割的基础算法,RanSaC很强大且必收敛,可以作为机器人抓取,识别等后续任务的前处理。
PCL—点云滤波(基于点云频率) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5010771.html 1.点云的频率 今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概 ...
PCL—点云分割(基于凹凸性) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5027269.html 1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割 ...
PCL—点云分割(邻近信息) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5000147.html 分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最 ...
PCL—点云分割(超体聚类) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5013968.html 1.超体聚类——一种来自图像的分割方法 超体(supervoxel)是一种集合,集合的元素是 ...
PCL—点云分割(基于形态学) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5017428.html 1.航空测量与点云的形态学 航空测量是对地形地貌进行测量的一种高效手段.生成地形三维形貌一直 ...
PCL—点云分割(最小割算法) 低层次点云处理
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
PCL—关键点检测(rangeImage)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5046479.html 关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的 ...
PCL—关键点检测(NARF)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5051533.html 关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别. ...
PCL—关键点检测(Harris)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5064848.html 除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更 ...
随机推荐
网摘 窗体的旋转效果 wpf