【基于Mediapipe与Unity的人体姿态捕捉系统】
基于Mediapipe与Unity的人体姿态捕捉系统
- 1. 工程整体介绍
- 2. 基于Mediapipe的人体姿态估计
-
- 2.1 环境搭建
- 2.2 代码片段
- 2.3 结果展示
- 2.4 结果分析
- 2.5 本章总结
- 3. 基于Unity的人体姿态展示
-
- 3.1 Unity 人体骨骼动画
- 3.2 Mediapipe坐标到Unity的映射
- 4. 从Mediapipe到Unity的数据传递
-
- 4.1 使用Python发送数据
- 4.2 使用C#接收数据
- 5. 成果展示
- 6. 后续展望
- 7.联系方式
1. 工程整体介绍
整个工程主要分成三部分:1.基于Mediapipe的人体姿态估计;2.基于Unity的人体姿态展示;3.从Mediapipe到Unity的通讯,即Mediapipe估计的姿态如何实时传递给Unity。
2. 基于Mediapipe的人体姿态估计
姿态估计部分,使用opencv进行人体采集,然后调用Mediapipe对读取的每一帧图像进行姿态估计。
2.1 环境搭建
版本要求:python >= 3.7
pip install mediapipe
pip install opencv-python
pip install opencv-contrib-python
参考官方文档:
链接: https://google.github.io/mediapipe/solutions/pose.
2.2 代码片段
博主假设你已经掌握了最基础的python语法
import cv2
import mediapipe as mp
import numpy as np
def Pose_Images():
#使用算法包进行姿态估计时设置的参数
mp_pose = mp.solutions.pose
with mp_pose.Pose(
min_detection_confidence=0.5,
min_tracking_confidence=0.8) as pose:
#打开摄像头
cap = cv2.VideoCapture(0)
while(True):
#读取摄像头图像
hx, image = cap.read()
if hx is False:
print('read video error')
exit(0)
image.flags.writeable = False
# Convert the BGR image to RGB before processing.
# 姿态估计
results = pose.process(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
print(results.pose_landmarks)
cv2.imshow('image', image)
if cv2.waitKey(10) & 0xFF == ord('q'): # 按q退出
break
cap.release()
if __name__ == '__main__':
Pose_Images()
2.3 结果展示
在你的控制台可以看到一个一个点的输出,如下,那么姿态估计就完成了第一步。
landmark {
x: 0.7439931035041809
y: 3.0562074184417725
z: -0.25115278363227844
visibility: 0.00022187501599546522
}
landmark {
x: 0.5690034627914429
y: 3.0262765884399414
z: -0.44416818022727966
visibility: 0.00034665243583731353
}
......
2.4 结果分析
下面我们来分析一下这些点的坐标到底代表了什么。
每一张图片都会产生一组坐标,每组坐标包含32个坐标点。
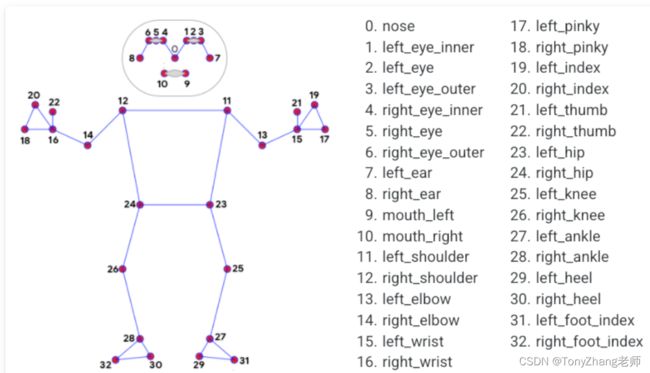
每个地标包括以下内容:
- x和y:通过图像宽度和高度分别归一化为[0.0, 1.0],通俗点说是,真实的x,y坐标,分别除以图像的宽度跟高度。
- z: 代表坐标的深度,臀部中点的深度为原点,数值越小,地标就越靠近摄像机。z的大小使用与x大致相同的比例。
- visibility:一个[0.0, 1.0]的值,表示坐标在图像中可见(存在且不被遮挡)的可能性。
2.5 本章总结
我们通过使用opencv库,打开摄像头采集照片,将照片传递给Mediapipe进行姿态坐标估计,后续我们将坐标放到Unity中进行展示就可以了。
3. 基于Unity的人体姿态展示
博主假设你已经掌握了unity的基础知识。
3.1 Unity 人体骨骼动画
我们可以从Unity商店中或者在此网站https://www.mixamo.com选择任意一个3D的人物模型导入到工程中。
3.2 Mediapipe坐标到Unity的映射
具体转换细节会专门写一篇文件来解释,数据是驱动骨骼运动的。整体的实现参考了开源的解决方案。
参考:
https://github.com/digital-standard/ThreeDPoseTracker
VNectModel.cs 文件实现了从预测坐标到Unity骨骼坐标的转换。
4. 从Mediapipe到Unity的数据传递
姿态预测跟unity的姿态展示毕竟属于不同的进程,对于进程之间的通讯有不同的实现方式。本文选择网络通讯中的UDP通讯,因为UDP通讯具有延迟小的特点,同时我们对于数据的丢失存在一定的容忍性。
4.1 使用Python发送数据
#代码片段示例:
json_data = json.dumps(pose_data)
udp_socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
dest_addr = ('127.0.0.1', 5052)
text = json_data.encode('utf-8')
udp_socket.sendto(text, dest_addr)
4.2 使用C#接收数据
此代码片段借鉴了此博主的文章(如有侵权,联系删除)。
Link
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System;
using System.Text;
using System.Net;
using System.Net.Sockets;
using System.Threading;
public class UDPRecive : MonoBehaviour
{
Thread receiveThread;
UdpClient client;
public int port = 5052;
public bool startRecieving = true;
public string data;
// Start is called before the first frame update
void Start()
{
receiveThread = new Thread(
new ThreadStart(ReceiveData));
receiveThread.IsBackground = true;
receiveThread.Start();
}
// Update is called once per frame
void Update()
{
}
private void ReceiveData()
{
client = new UdpClient(port);
while (startRecieving)
{
Debug.Log("startRecieving");
try
{
IPEndPoint anyIP = new IPEndPoint(IPAddress.Any, 0);
byte[] dataByte = client.Receive(ref anyIP);
data = Encoding.UTF8.GetString(dataByte);
Debug.Log(data);
}
catch (Exception err)
{
print(err.ToString());
}
}
}
}
5. 成果展示
从姿态预测到3D展示就完成了,那么我们来看一下效果吧。
11月25日
6. 后续展望
后续会根据需求,出一个对全部代码的讲解,可以帮助读者一步步实现自己的工程。
欢迎提出意见或建议。
7.联系方式
欢迎私信加我。