ROS系统中从零开始部署YoloV4目标检测算法(3种方式)
目录
1 封装darknet框架为dll方式
2 封装TensorFlow或pytorch框架为dll方式
3 调用OpenCV中DNN模块方式
3.0 需求说明
3.1 环境搭建
3.2 创建catkin空间
3.3 创建package
3.4 package中源码
3.4.1 ①main.cpp
3.4.2 ②Detection.h
3.4.3 ③Detection.cpp
3.4.4 ④CMakeLists.txt
3.4.5 ⑤package.xml
3.5 修改ROS系统中cv_bridge模块的配置文件
3.6 重新编译catkin空间
3.7 测试
1 封装darknet框架为dll方式
暂略
2 封装TensorFlow或pytorch框架为dll方式
暂略
3 调用OpenCV中DNN模块方式
3.0 需求说明
在ROS系统下创建一个package目标检测程序,订阅realsense传感器的RGB流,进行行人检测,然后将检测结果信息发布出去。
包和节点名称定义:
- 该目标检测package名称为:detection_pkg
- 开展目标检测的节点名称为:yolo4
- 发布检测结果的节点名称为:yolo4_result
接口定义:
目标检测结果发布的格式为:(string类型)类别序号,置信度,目标框的xmin,目标框的ymin,目标框的width,目标框的height@类别序号,置信度,目标框的xmin,目标框的ymin,目标框的width,目标框的height@............
接口解释:
- 单帧图像中,可能有多个人,每个检测人框的结果以@分隔。
- “人”的类别序号目前设定为0,后续开展其他目标检测时,新增类别序号后续再定。
- 置信度的取值范围:[0, 1]
- 重要备注:目前xy的坐标,人在图像边缘情况出现xy为负值情况,该BUG后续将会去解决。
3.1 环境搭建
- 关于OpenCV4.5.1编译安装、ROS melodic版安装等见我之前的《ubuntu + oepncv + PCL + realsenseSDK + ROS + OpenVino开发环境搭建》https://blog.csdn.net/weixin_42118657/article/details/114527831
- yolov4算法的模型文件、cfg文件、coco.names文件可百度搜索下载,具体文件摆放位置见下文源码。
3.2 创建catkin空间
$ mkdir -p ~/catkin_ws/src #直接创建了catkin_ws文件夹和src子文件夹。
$ cd ~/catkin_ws/
$ catkin_make #初始化工作空间,此命令必须在工作空间路径下执行。备注:catkin_ws是工作空间名字,可自定义。
重要备注:创建工作空间后,还需要给工作空间进行注册,注册的目的是让各种命令能够找到这个工作空间(相当于win系统中设定path)。
- 注册方法1(注册一次爽一次):每次新建一个终端时,都先执行如下命令告诉此终端我在哪:source ~/catkin_ws/devel/setup.bash #catkin_ws是改你空间名字。
- 注册方法2(一劳永逸):
(base) ym@ym-2021:~$ echo "source ~/catkin_test/catkin_2/devel/setup.bash" >> ~/.bashrc
(base) ym@ym-2021:~$ source ~/.bashrc备注:上述catkin_test是我创建的普通文件夹,catkin_2是我创建的Catkin工作空间。
3.3 创建package
- 先cd到工作空间的src路径内,然后创建package,语法规则是:catkin_create_pkg packageYY dependsXX
- 其中packageYY是包名,dependsXX是依赖的包名,可以依赖多个软件包。
- 例如,新建一个package叫做detection
_pkg,依赖roscpp、rospy、std_msgs(常用依赖)。-
$ catkin_create_pkg detection_pkg roscpp rospy std_msgs
-
3.4 package中源码
程序结构如下:(在/home/ym/catkin_test/catkin_2/src/detection_pkg 路径下)
- ①main.cpp(自己的程序)
- ②Detection.h(自己的程序)
- ③Detection.cpp(自己的程序)
- ④CMakeLists.txt(创建package时自动生成的,等下需要改造内容)
- ⑤package.xml(创建package时自动生成的,等下需要改造内容)
- include 文件夹(创建package时自动生成的空文件夹)
- src 文件夹(创建package时自动生成的空文件夹)
3.4.1 ①main.cpp
#include "Detection.h"
#include
#include //cv_bridge是在ROS图像消息和OpenCV图像之间进行转换的一个功能包。如提供sensor_msgs
#include
#include
ros::Publisher pub;
#include "std_msgs/Int8.h"
#include "std_msgs/String.h"
using namespace std;
using namespace cv;
using namespace dnn;
Detection detection = Detection();
void imageCallback(const sensor_msgs::ImageConstPtr &msg)
{
cv::Mat img;
cv_bridge::CvImageConstPtr cv_ptr;
cv_ptr = cv_bridge::toCvShare(msg, "bgr8");
img = cv_ptr->image;
detection.Initialize(img.cols, img.rows);
detection.Detecting(img);
imshow("Show RgbImage", detection.GetFrame());
char ch = waitKey(10); // 一定要加这个,不然不显示窗口
string output = detection.GetResult();
std_msgs::String out_msg;
std::stringstream ss;
ss << output;
out_msg.data = ss.str();
pub.publish(out_msg);
}
int main(int argc, char **argv)
{
//创建node第一步需要用到的函数
ros::init(argc, argv, "yolo4"); //第3个参数为本节点名,
//ros::NodeHandle : 和topic、service、param等交互的公共接口
//创建ros::NodeHandle对象,也就是节点的句柄,它可以用来创建Publisher、Subscriber以及做其他事情。
//句柄(Handle)这个概念可以理解为一个“把手”,你握住了门把手,就可以很容易把整扇门拉开,而不必关心门是
//什么样子。NodeHandle就是对节点资源的描述,有了它你就可以操作这个节点了,比如为程序提供服务、监听某个topic上的消息、访问和修改param等等。
ros::NodeHandle nd; //实例化句柄,初始化node
// Create a ROS subscriber for the input point cloud
ros::Subscriber sub = nd.subscribe("/realsense_camera0/color_image", 1, imageCallback); //第二个参数:缓存队列大小,以防我们处理消息的速度不够快
std::cout << "sub:" << sub << std::endl;
// Create a ROS publisher for the output
pub = nd.advertise("yolo4_result", 1);
ros::spin();
return 0;
} 3.4.2 ②Detection.h
#pragma once
#ifndef __DETECTION_H__
#define __DETECTION_H__
#include
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
using namespace dnn;
class Detection
{
public:
//构造、析构函数
Detection();
~Detection();
//初始化函数
void Initialize(int width, int height);
//读取网络模型
void ReadModel();
//行人与车辆检测
bool Detecting(Mat frame);
//获取网络输出层名称
vector GetOutputsNames();
//对输出进行处理,使用NMS选出最合适的框
void PostProcess();
//画检测结果
void Drawer();
//画出检测框和相关信息
void DrawBoxes(int classId, float conf, int left, int top, int right, int bottom);
//获取Mat对象
Mat GetFrame();
//获取检测结果字符串
string GetResult();
//获取图像宽度
int GetResWidth();
//获取图像高度
int GetResHeight();
private:
//图像属性
int m_width; //图像宽度
int m_height; //图像高度
//网络处理相关
Net m_model; //网络模型
Mat m_frame; //每一帧
Mat m_blob; //从每一帧创建一个4D的blob用于网络输入
vector m_outs; //网络输出
vector m_confs; //置信度
vector m_boxes; //检测框左上角坐标、宽、高
vector m_classIds; //类别id
vector m_perfIndx; //非极大阈值处理后边界框的下标
//检测超参数
int m_inpWidth; //网络输入图像宽度
int m_inpHeight; //网络输入图像高度
float m_confThro; //置信度阈值
float m_NMSThro; //NMS非极大抑制阈值
vector m_classes; //类别名称
private:
//内存释放
void Dump();
};
#endif 3.4.3 ③Detection.cpp
#include "Detection.h"
using namespace cv;
using namespace dnn;
//构造函数,成员变量初始化
Detection::Detection()
{
//图像属性
m_width = 0;
m_height = 0;
m_inpWidth = 416;
m_inpHeight = 416;
//其他成员变量
m_confThro = 0.25;
m_NMSThro = 0.4;
//网络模型加载
ReadModel();
}
//析构函数
Detection::~Detection()
{
//Dump();
}
//内存释放
void Detection::Dump()
{
//网络输出相关清零
m_outs.clear();
m_boxes.clear();
m_confs.clear();
m_classIds.clear();
m_perfIndx.clear();
}
//初始化函数
void Detection::Initialize(int width, int height)
{
//图像属性
m_width = width;
m_height = height;
}
//读取网络模型和类别
void Detection::ReadModel()
{
string classesFile = "/data/coco.names";
String modelConfig = "/data/yolov4.cfg";
String modelWeights = "/data/yolov4.weights";
//加载类别名
ifstream ifs(classesFile.c_str());
string line;
while (getline(ifs, line))
m_classes.push_back(line);
//加载网络模型
m_model = readNetFromDarknet(modelConfig, modelWeights);
m_model.setPreferableBackend(DNN_BACKEND_OPENCV);
m_model.setPreferableTarget(DNN_TARGET_OPENCL);
}
//检测
bool Detection::Detecting(Mat frame)
{
Dump(); //各缓存变量的内存释放
m_frame = frame.clone();
//创建4D的blob用于网络输入
blobFromImage(m_frame, m_blob, 1 / 255.0, Size(m_inpWidth, m_inpHeight), Scalar(0, 0, 0), true, false);
//设置网络输入
m_model.setInput(m_blob);
//前向预测得到网络输出,forward需要知道输出层,这里用了一个函数找到输出层
m_model.forward(m_outs, GetOutputsNames());
//使用非极大抑制NMS删除置信度较低的边界框
PostProcess();
//画检测框
Drawer();
return true;
}
//获取网络输出层名称
vector Detection::GetOutputsNames()
{
static vector names;
if (names.empty())
{
//得到输出层索引号
vector outLayers = m_model.getUnconnectedOutLayers();
//得到网络中所有层名称
vector layersNames = m_model.getLayerNames();
//获取输出层名称
names.resize(outLayers.size());
for (int i = 0; i < outLayers.size(); ++i)
names[i] = layersNames[outLayers[i] - 1];
}
return names;
}
//使用非极大抑制NMS去除置信度较低的边界框
void Detection::PostProcess()
{
for (int num = 0; num < m_outs.size(); num++)
{
Point Position;
double confidence;
//得到每个输出的数据
float *data = (float *)m_outs[num].data;
for (int j = 0; j < m_outs[num].rows; j++, data += m_outs[num].cols)
{
//得到该输出的所有类别的
Mat scores = m_outs[num].row(j).colRange(5, m_outs[num].cols);
//获取最大置信度对应的值和位置
minMaxLoc(scores, 0, &confidence, 0, &Position);
//对置信度大于阈值的边界框进行相关计算和保存
if (confidence > m_confThro)
{
//data[0],data[1],data[2],data[3]都是相对于原图像的比例
int centerX = (int)(data[0] * m_width);
int centerY = (int)(data[1] * m_height);
int width = (int)(data[2] * m_width);
int height = (int)(data[3] * m_height);
int left = centerX - width / 2;
int top = centerY - height / 2;
//保存信息
m_classIds.push_back(Position.x);
m_confs.push_back((float)confidence);
m_boxes.push_back(Rect(left, top, width, height));
}
}
}
//非极大值抑制,以消除具有较低置信度的冗余重叠框
NMSBoxes(m_boxes, m_confs, m_confThro, m_NMSThro, m_perfIndx);
}
//画出检测结果
void Detection::Drawer()
{
//获取所有最佳检测框信息
for (int i = 0; i < m_perfIndx.size(); i++)
{
int idx = m_perfIndx[i];
Rect box = m_boxes[idx];
// std::cout << "m_classIds[idx]"<< m_classIds[idx] << std::endl;
// std::cout << "m_confs[idx]"<< m_confs[idx] << std::endl;
// std::cout << "box.x"<< box.x << std::endl;
// std::cout << "box.y"<< box.y << std::endl;
// std::cout << "box.width"<< box.width << std::endl;
// std::cout << "box.height"<< box.height << std::endl;
if (m_classIds[idx] == 0) //仅person类
{
DrawBoxes(m_classIds[idx], m_confs[idx], box.x, box.y,
box.x + box.width, box.y + box.height);
}
// DrawBoxes(m_classIds[idx], m_confs[idx], box.x, box.y,
// box.x + box.width, box.y + box.height);
}
}
//画出检测框和相关信息
void Detection::DrawBoxes(int classId, float conf, int left, int top, int right, int bottom)
{
//画检测框
rectangle(m_frame, Point(left, top), Point(right, bottom), Scalar(255, 178, 50), 3);
//该检测框对应的类别和置信度
string label = format("%.2f", conf);
if (!m_classes.empty())
{
CV_Assert(classId < (int)m_classes.size());
label = m_classes[classId] + ":" + label;
}
//将标签显示在检测框顶部
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
rectangle(m_frame, Point(left, top - round(1.5 * labelSize.height)), Point(left + round(1.5 * labelSize.width), top + baseLine), Scalar(255, 255, 255), FILLED);
putText(m_frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 0, 0), 1);
}
//获取Mat对象
Mat Detection::GetFrame()
{
return m_frame;
}
//返回检测结果
string Detection::GetResult()
{
string result = "";
//获取所有最佳检测框信息
for (int i = 0; i < m_perfIndx.size(); i++)
{
int idx = m_perfIndx[i];
Rect box = m_boxes[idx];
// std::cout << "m_classIds[idx]"<< m_classIds[idx] << std::endl;
// std::cout << "m_confs[idx]"<< m_confs[idx] << std::endl;
// std::cout << "box.x"<< box.x << std::endl;
// std::cout << "box.y"<< box.y << std::endl;
// std::cout << "box.width"<< box.width << std::endl;
// std::cout << "box.height"<< box.height << std::endl;
if (m_classIds[idx] == 0) //仅person类
{
stringstream strStream;
//int、float类型都可以塞到stringstream中
strStream << m_classIds[idx] << "," << m_confs[idx] << "," << box.x << "," << box.y << "," << box.width << "," << box.height;
result = strStream.str();
}
}
return result;
}
//获取结果图像宽度
int Detection::GetResWidth()
{
return m_width;
}
//获取结果图像高度
int Detection::GetResHeight()
{
return m_height;
}
3.4.4 ④CMakeLists.txt
这部分主要新增如下几点:
-
开头几行find_package中新增“cv_bridge”
-
新增OpenCV部分
cmake_minimum_required(VERSION 3.0.2)
project(detection_pkg)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
cv_bridge
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES detection_pkg
# CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/detection_pkg.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/detection_pkg_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_detection_pkg.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
#此句要在下面target_link_libraries语句之前!!!!!
set(DETECTION Detection.cpp)
add_executable(yolo4 main.cpp ${DETECTION})
# opencv opencv opencv opencv opencv opencv
#寻找opencv库
find_package(OpenCV REQUIRED)
#添加头文件
include_directories(${OpenCV_INCLUDE_DIRS})
#链接Opencv库
target_link_libraries(yolo4 ${OpenCV_LIBS} )
target_link_libraries(yolo4 ${catkin_LIBRARIES})
3.4.5 ⑤package.xml
这里主要是新增一个“cv_bridge”字段
detection_pkg
0.0.0
The detection_pkg package
ym
TODO
catkin
roscpp
rospy
std_msgs
cv_bridge
roscpp
rospy
std_msgs
cv_bridge
roscpp
rospy
std_msgs
cv_bridge
3.5 修改ROS系统中cv_bridge模块的配置文件
因为ROS系统中默认安装一个低版本OpenCV,导致有些函数无法正常使用而报错,需要修改ROS系统中cv_bridge模块对OpenCV的引用,让它引用自己安装的4.5.1版本OpenCV。
参考:《Ubuntu18.04+ROS melodic+opencv4 修改cv_bridge配置文件,解决ROS使用不同版本opencv的冲突问题》https://blog.csdn.net/PrideQ/article/details/115304494
操作步骤:
- 首先找到cv_brige文件,使用gedit打开:
- cd /opt/ros/melodic/share/cv_bridge/cmake/
- sudo gedit cv_bridgeConfig.cmake
- 将此处指定的头文件目录改到自己安装的头文件目录下:
- 之后再将指定库文件也修改为自己安装的opencv库文件:


3.6 重新编译catkin空间
- 先cd到工作空间路径(注意不是package路径),比如我的是:/home/ym/catkin_test/catkin_2
- 然后终端中执行:catkin_make
按照流程走编译一般没问题,有其他小问题应该也好自己解决。
BUG备注:
- make[2]: *** No rule to make target '/usr/local/lib/libopencv_hiqhgui.so.4.5.1', needed by '/home/moi/yinming/catkin_ym/devel/lib/detection_pkg/yolo4'
- 原因打错字:libopencv_hiqhgui.so.4.5.1应该写成libopencv_highgui.so.4.5.1
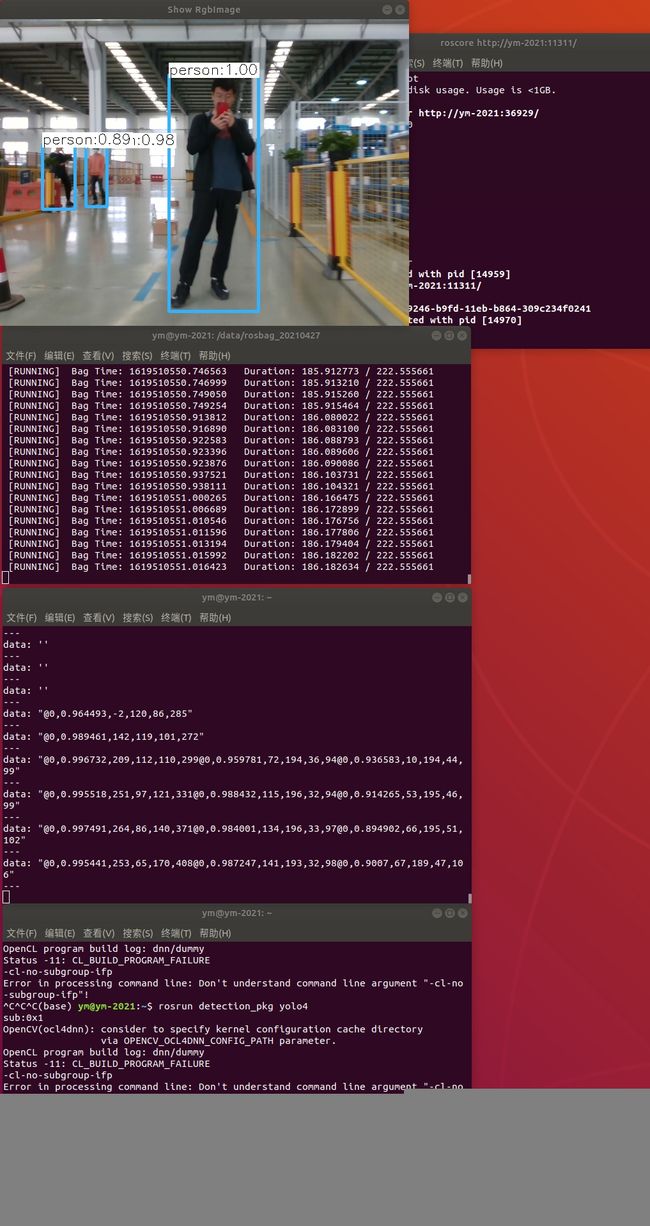
3.7 测试
测试流程简述:使用在ros系统中预先录制的realsense传感器的bag数据,通过rosbag play这个bag历史数据,然后我们这个目标检测package程序去订阅里面的RGB流,再将检测结果发布出来。
整个流程操作命令如下(顺序不能变):
- 新建第1个终端,直接执行:roscore
- 新建第2个终端,cd到bag包的存放路径,执行:rosbag play 2021-04-27-15-59-19.bag
- 新建第3个终端,直接执行:rosrun detection_pkg yolo4
- 新建第4个终端,直接执行:rostopic echo yolo4_result
结果如下:
问题备注:
在真机上编译通过,运行节点时,如果报如下错:
- what(): OpenCV(4.5.1) /home/moi/yinming/OpenCV/opencv-4.5.1/modules/highgui/src/window_gtk.cpp:624: error: (-2:Unspecified error) Can't initialize GTK backend in function 'cvInitSystem'
- 原因是:笔记本VScode远程接入机器的Ubuntu系统,没有可视化界面,需要注释main.py中可视化的两行代码。
- imshow("Show RgbImage", detection.GetFrame());
- char ch = waitKey(10);