LSTM和GRU
LSTM和GRU
RNN的优缺点
优点:
- 可以捕获序列之间的关系;
- 共享参数。
缺点:
- 存在梯度消失和梯度爆炸问题;
- RNN的训练是一个比较困难的任务;
- 无法处理长序列问题。
LSTM
LSTM可以处理长序列问题,同样在之前这篇文章中,关于LSTM网络的核心思想介绍的比较明白,而且传送带的比喻比较形象,结合上篇和当前这篇可以对LSTM有更深入的理解。
接着上篇文章中的例子,RNN一个时间步t的输出为:
y = activation(dot(state_t, U) + dot(input_t, W) + b)
LSTM多了一个Ct:
output_t = activation(dot(state_t, Uo) + dot(input_t, Wo) + dot(C_t, Vo) + bo)
Ct的计算方式:
i_t = activation(dot(state_t, Ui) + dot(input_t, Wi) + bi)
f_t = activation(dot(state_t, Uf) + dot(input_t, Wf) + bf)
k_t = activation(dot(state_t, Uk) + dot(input_t, Wk) + bk)
c_t+1 = i_t * k_t + c_t * f_t
接下来先看看LSTM的网络结构图,可以帮助更好的理解上面的计算含义

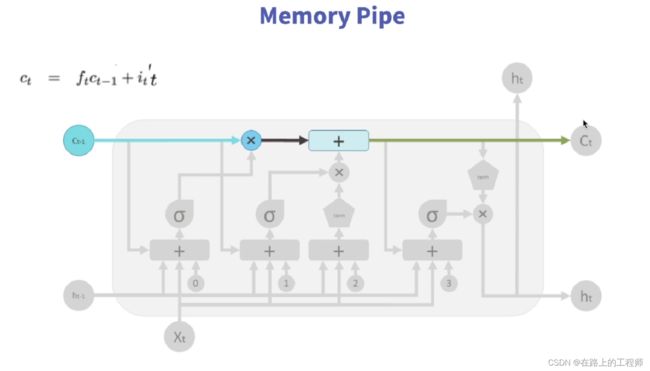
c_t+1 = i_t * k_t + c_t * f_t,其中f_t是下面这部分(也就是forget gate)

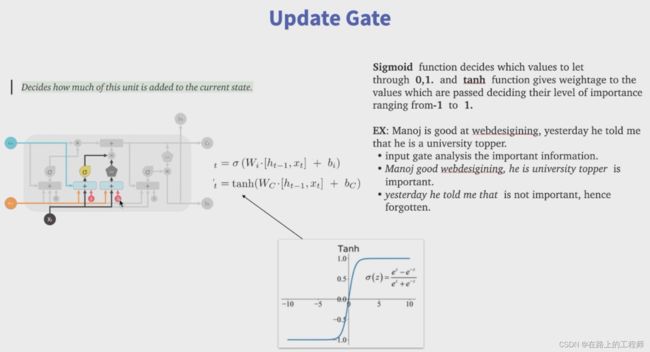
i_t*k_t是下面这部分(也就是update gate,网上一般将此门称为输入门)
之后将这两部分加到一起(memory pipe)
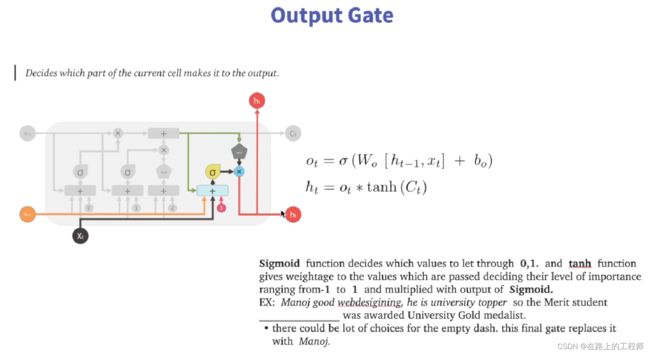
别忘了,以上只是在计算Ct,Ct只是LSTM相比较于RNN增加的部分,真正的输出(ht)是下面这部分
代码实现
仅返回最终输出
# 32个句子,每个句子长度为10,词向量长度为8
inputs = tf.random.normal([32, 10, 8])
lstm = tf.keras.layers.LSTM(4)
output = lstm(inputs)
print(output.shape)
(32, 4)
返回每个时间步的输出
# 这里每个句子的长度为10,正常一个句子会有一个向量输出,如果return_sequences=True,则句子中每个单词均会有一个输出。
lstm = tf.keras.layers.LSTM(4, return_sequences=True)
out = lstm(inputs)
print(out.shape)
返回除最后一个输出之外的最后一个状态
lstm = tf.keras.layers.LSTM(4, return_sequences=False, return_state=True)
# 会同时返回h状态和c状态,不过仅是最后一个状态
# return_sequences=False时,h状态和out的值是一样的
out, h_state, c_state = lstm(inputs)
print(out.shape)
print(h_state.shape)
print(c_state.shape)
(32, 4)
(32, 4)
(32, 4)
返回所有时间步的输出和最后一个状态
lstm = tf.keras.layers.LSTM(4, return_sequences=True, return_state=True)
# out = lstm(inputs)
out, h_state, c_state = lstm(inputs)
print(out.shape)
print(h_state.shape)
print(c_state.shape)
(32, 10, 4)
(32, 4)
(32, 4)
GRU
LSTM参数过多,计算量大,也存在梯度消失的问题,为解决计算量过大的问题,将LSTM中的遗忘门和输入门简化为一个更新门,这就是GRU。
单个GRU的结构图:
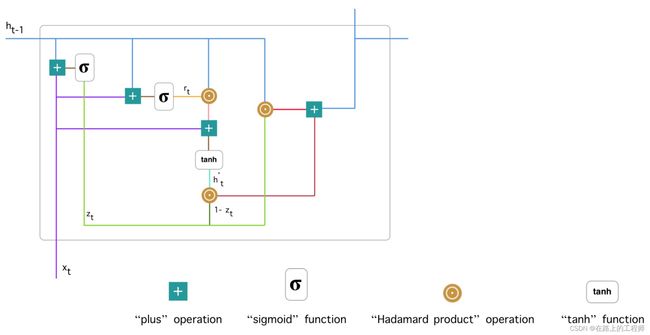
下面是整个图的拆解图

代码实现
inputs = tf.random.normal([32, 10, 8])
gru = tf.keras.layers.GRU(4)
output = gru(inputs)
print(output.shape)
(32, 4)
# return_sequences参数的用法和lstm一样
gru = tf.keras.layers.GRU(4, return_sequences=True, return_state=True)
out, final_state = gru(inputs)
print(out.shape)
print(final_state.shape)
(32, 10, 4)
(32, 4)
注意,这里GRU返回值只有两个,相比LSTM,没有c_state,这个也正是GRU相比于LSTM的优化点,后面会进一步说明。同样的,当return_sequences=False时,out和final_state的值是一致的。
LSTM VS GRU
-
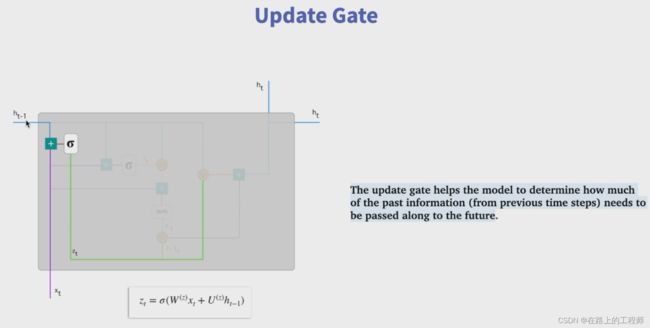
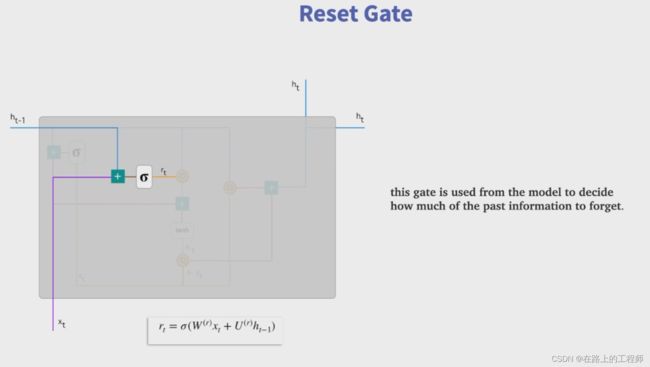
GRU 只有两个门。GRU 将 LSTM 中的输入门和遗忘门合二为一,称为更新门(update gate),控制前边记忆信息能够继续保留到当前时刻的数据量,或者说决定有多少前一时间步的信息和当前时间步的信息要被继续传递到未来;GRU 的另一个门称为重置门(reset gate),控制要遗忘多少过去的信息。
-
取消进行线性自更新的记忆单元(memory cell,也就是不再使用c_state),而是直接在隐藏单元中利用门控直接进行线性自更新。
-
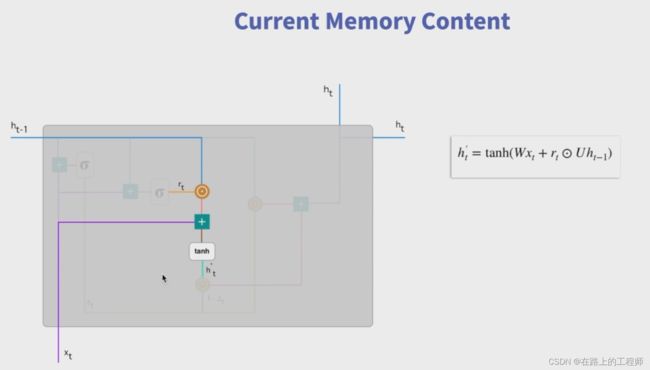
利用重置门重置记忆信息,GRU 不再使用单独的记忆细胞存储记忆信息,而是直接利用隐藏单元记录历史状态。利用重置门控制当前信息和记忆信息的数据量,并生成新的记忆信息继续向前传递。
-
利用更新门计算当前时刻隐藏状态的输出,隐藏状态的输出信息由前一时刻的隐藏状态信息h_(t-1)和当前时刻的隐藏状态输出h_t ,利用更新门控制这两个信息传递到未来的数据量。