opencv相机标定(3)-鱼眼镜头成像模型与标定
成像模型
这篇博客介绍得很详细,链接
其中,opencv鱼眼相机标定后,畸变参数是4个,链接里博客的畸变参数是五个,应该是使k0=1.
![]()
1)世界坐标系->相机坐标系
![]()
2)相机坐标系->图像物理坐标系

注意使用的是归一化的坐标,鱼眼模型好像都是近似为单位球面投影模型,这点还是比较困惑,为什么不直接用f,而是在单位球面上建模。
径向畸变坐标
![]()
![]()
xd,yd这个公式不太明白,括号内应该是rd才对吧?不过如果是单位球面、等距投影,rd=theta_d,这样就说的通了。
![]()
3)图像物理坐标系->图像像素坐标系
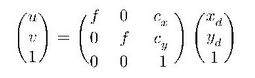
综合:

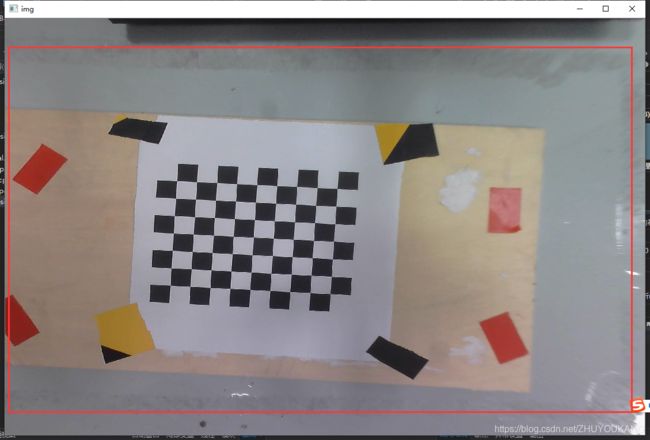
鱼眼相机标定与调整显示范围
#include "LearnBasic.h"
#include "stdio.h"
#include 调整显示后,大致就是我需要的一个540宽左右区域的范围