FMCW毫米波雷达原理
Radar系列文章
传感器融合是将多个传感器采集的数据进行融合处理,以更好感知周围环境;这里首先介绍毫米波雷达的相关内容,包括毫米波雷达基本介绍,毫米波雷达数据处理方法(测距测速测角原理,2D FFT,CFAR,聚类,毫米波雷达障碍物识别实例)等。
系列文章目录
1. 毫米波雷达基本介绍
2. FMCW毫米波雷达原理
文章目录
-
- Radar系列文章
- FMCW扫频波基础
- 雷达测距原理 (相对静止时)
- 多普勒频移公式
- 运动目标测距测速原理
- 雷达相位法测角原理
- 雷达天线
- RCS雷达截面积
- 雷达方程
- 雷达性能参数
障碍物检测过程中,我们主要希望通过雷达测量运动目标的距离,速度,角度等信息。本节主要介绍雷达的测距测速测角原理。
FMCW扫频波基础
我们知道,毫米波是电磁波,现在我们首先简单回顾一下电磁波的基础知识。
波形公式
y ( t ) = A c o s ( 2 π ⋅ f c ⋅ t + φ ) y(t) = Acos(2π·f_c·t+φ) y(t)=Acos(2π⋅fc⋅t+φ)
波长λ
传播完整周期电磁波所走过的距离;
Wavelength (λ)=speed of light ( c c c)/frequency( f c f_c fc);

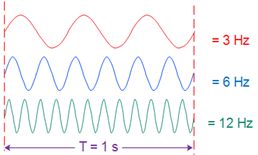
频率 f c f_c fc
单位时间内传播的波数;汽车雷达通常工作在W波段(76GHz - 81GHz);
幅值A
信号强度/能量,单位为dB/dBm,1 dBm=1 mW;

相位ϕ
波传播过程中该时刻所在的位置点;

FMCW Frequency Modulated Continous Wave
FMCW雷达发射的是调频连续波,24GHz雷达可用带宽250MHz,77GHz雷达可用带宽800MHz,实际应用中雷达带宽会小很多(防止能量泄露到相邻频带)。如下图所示,雷达通常发射扫频信号(三角波或锯齿波),红色的为发射的扫频信号,绿色的为接收的回波信号,通过这两个信号,我们就可以获得距离和速度信号(下图为目标物静止时的回波信号,有相对速度时会有多普勒频移),B为扫频带宽,Ts为扫频周期(chirp time)。


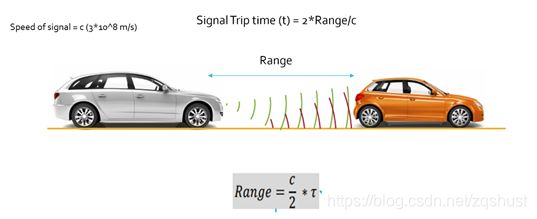
雷达测距原理 (相对静止时)
这里我们首先来推算相对静止时的距离估计。如下图可知,根据Trip time t t t可以获取距离信息。由于 t t t无法直接测量,因此我们通过FMCW扫频波进行测量。
暂时不考虑多普勒频移(相对静止),距离公式推导如下图所示。
R = c T s f b 2 B S w e e p R=\frac{cT_sf_b}{2B_{Sweep}} R=2BSweepcTsfb
其中 f b f_b fb: beat frequency(静止时频偏 f d = 0 f_d=0 fd=0, f b = f r f_b=f_r fb=fr), T s T_s Ts: Sweep time 扫频时间, B S w e e p B_{Sweep} BSweep: Sweep bandwidth 扫频带宽;


多普勒频移公式

雷达主要利用多普勒频移来直接测量移动物体的速度,即雷达向前发射毫米波波段的电磁波,并接收其回波;如遇到移动物体,则回波频率与发射频率会出现偏差,即多普勒频移;利用此频移即可获得相对速度。多普勒频移公式如下:
f d = 2 v r ∗ f 0 / c f_d = 2 v_r *f_0/c fd=2vr∗f0/c
其中 f d f_d fd为多普勒频移, v r v_r vr为相对速度, f 0 f_0 f0为发射频率(24GHz/77GHz/79GHz), c c c为光速(299792458m/s);由此公式可以推导出,对于77GHz毫米波雷达, f 0 = 76.5 G H z f_0=76.5GHz f0=76.5GHz, v r = 1 m / s v_r=1m/s vr=1m/s相对速度约对应 f d = 510 H z f_d=510Hz fd=510Hz频移, 1 k m / h 1km/h 1km/h相对速度约对应 f d = 0.1418 k H z f_d=0.1418kHz fd=0.1418kHz频移。

运动目标测距测速原理
FMCW调频连续波雷达有多种调制方式:三角波调制和锯齿波调制,频移键控(Frequency Shift Keying,FSK)调制以及多频移键控(Multiple Frequency Shift Keying,MFSK)调制等。
三角波是由两个对称的线性调频连续波(Linear Frequency Modulated Continuous Wave,LFMCW)组成,分为上、下扫频,利用上、下扫 频差拍信号频谱对称的性质,对距离和速度进行解耦,算法简单,在此进行介绍。对于锯齿波,一个周期内无法解算出多普勒频移 f d f_d fd和相对静止时的频率 f r f_r fr,需要连续观测多个周期进行解算。
对称三角波雷达发射对称的上、下扫频段线性调频信号,对每一扫频段,通过将发射信号与接收信号进行混频获得回波差拍信号,差拍信号包含目标的距离和径向速度信息,利用上、下扫频段差拍信号频谱对称的性质,得到目标的距离和速度参数。
对称三角波雷达发射信号、回波信号及差拍信号时频关系如下图所示:

多普勒频移: f d = 2 v r ∗ f 0 / c f_d = 2 v_r *f_0/c fd=2vr∗f0/c
相对静止时频率 f r = μ ⋅ 2 R / c f_r=\mu\cdot2R/c fr=μ⋅2R/c,其中 μ = B / T \mu=B/T μ=B/T为扫频频率变化率(三角波扫频中, μ = B s w e e p / T s \mu=B_{sweep}/T_s μ=Bsweep/Ts)。
相对运动时上下沿对应
f b + = f r + f d f_b^+=f_r+f_d fb+=fr+fd
f b − = f r − f d f_b^-=f_r-f_d fb−=fr−fd
距离
R = c ( f b + + f b − ) T / 4 B R=c(f_b^++f_b^-)T/4B R=c(fb++fb−)T/4B
相对速度
v r = c ( f b + − f b − ) / 4 f 0 v_r=c(f_b^+-f_b^-)/4f_0 vr=c(fb+−fb−)/4f0
雷达相位法测角原理
目前雷达普遍采用平面阵列天线,多发多收(比如2Tx 4Rx天线),通过监测同一目标物反射回来的毫米波的相位差b,就可以解算出被测目标的方位角;
回波到达不同Rx天线有 d s i n ( α ) dsin(\alpha) dsin(α)的波程差,对应空间距离为 λ b / 2 π {\lambda}b/{2\pi} λb/2π,求解过程如下:
d s i n ( α a z ) = λ b / 2 π dsin({\alpha}_{az})={\lambda}b/{2\pi} dsin(αaz)=λb/2π
α a z = s i n − 1 ( λ b / 2 π d ) {\alpha}_{az}=sin^{-1}({\lambda}b/{2\pi d}) αaz=sin−1(λb/2πd)

雷达天线
FCMW硬件定义中,天线是一个收发器,实现电能和电磁波的转换。天线发射信号后,这些电磁波向外扩散,遇到障碍物后反射回来。根据目标表面类型和形状,部分电磁波反射回雷达接收天线,然后雷达放大接受的信号并送回混频器进行进一步处理。
天线有很多类型,汽车77GHz毫米波雷达最常用的是贴片天线,具有成本低,制造工艺简单,尺寸小等优点。
天线方向图
天线方向图(antenna pattern)是天线发射强度的几何模型。
天线水平波束宽度(beamwidth)决定雷达传感器的FOV视角。如果雷达只需要探测当前车道的物体,则波束宽度要窄以保证覆盖当前车道期望的距离。如果波束宽度较大则会探测到相邻车道的目标物。

天线辐射时,不仅包括主瓣,还包括旁瓣。旁瓣对雷达感知影响较大,天线旁瓣指向不同的方向,可能会感知到主瓣外的目标导致误报。为避免旁瓣误检通常要求主瓣峰值能量超过旁瓣30dB。
RCS雷达截面积
RCS(Radar Cross Section )雷达截面积σ( m 2 m^2 m2),是指目标物反射雷达能量的大小和能力,雷达RCS截面积取决于:
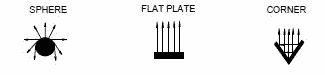
- 目标物的物理属性和外部特征;光滑的边或平面会将雷达波散射到各个方向,因此RCS较低,而尖锐边角会将发射的雷达波聚焦反射回雷达接收天线,因此RCS较高;
- 雷达探测方向;
- 雷达发射频率;
- 目标物(乘用车,卡车,自行车,行人的衣服材料等)的材料。

如果目标为对入射雷达波均匀反射至各个方向,则雷达截面积等于雷达所看到的目标物截面积。但实际上,入射雷达波不是均匀反射(下图是不同目标几何形状的反射波),而且部分能量被吸收。因此,雷达截面积很难进行估计,通常通过测试得到。
RCS单位除 m 2 m^2 m2外,也可以是dB,换算公式如下:
R C S d B = 10 l o g ( R C S m 2 ) RCS_{dB}=10log(RCS_{m^2}) RCSdB=10log(RCSm2)
以下是不同目标RCS值。

雷达方程
雷达方程用于设计雷达收发器,天线以实现预定的能量,增益,和噪声性能以达到雷达要求。
长距离雷达最远可探测300m距离,为检测较小截面积的目标,长距离雷达相对短距离雷达(如探测距离50m)需要较高的发射能量和天线增益。如果目标物RCS较大,则雷达可以在较远的距离探测到。以下是雷达方程:

R R R - 最远探测距离.
P s Ps Ps - 雷达发射能力(dBm)
G G G- 收发天线增益(dBi)
λ λ λ - 信号波长(mm)
σ σ σ - 雷达截面积(m2)
P E P_E PE - 雷达探测到目标的最小接收能量.
下图显示了雷达波发射传播反射过程中的信号强度值变化。
能量变化过程包括:
- 发射器信号能量
- 发射链能量增益:功放增益信号能量;
- 发射天线进一步增益信号能力;
- 雷达波从雷达传播到目标物时的能量损失;
- 根据目标物RCS的不同,反射不同能量的回波;
- 雷达回波传播回目标物时的能量损失;
- 接收天线放大器在发射给处理单元前增益回波信号。

雷达性能参数

距离分辨率 d r e s d_{res} dres
即雷达分辨两个近距离目标的能力;距离分辨率只和扫频带宽 B s w e e p B_{sweep} Bsweep有关。
d r e s = c / 2 B s w e e p d_{res}=c/{2B_{sweep}} dres=c/2Bsweep
测距精度 d r e s d_{res} dres
目标测距精度主要与信噪比SNR有关。
δ R = c / 3.6 B s w e e p 2 S N R \delta_R=c/{3.6B_{sweep}\sqrt{2SNR}} δR=c/3.6Bsweep2SNR
最大探测速度 v m a x v_{max} vmax
v m a x = λ / 4 T c v_{max}=\lambda/{4T_c} vmax=λ/4Tc
Tc为chirp总周期(包括active chirp time+idle time)
速度分辨率 Δ v \Delta v Δv
表示速度维度区分同一位置不同速度目标的能力;假设一帧传输N个chirp,则速度维度频率分辨率为 2 π / N 2\pi/N 2π/N。
Δ ϕ > 2 π / N → Δ v > λ / 2 N T c = λ / 2 T f \Delta \phi>2\pi/N→ \Delta v > \lambda / {2NT_c}=\lambda / {2T_f} Δϕ>2π/N→Δv>λ/2NTc=λ/2Tf
T f T_f Tf为有效帧周期( T f = N T c T_f=N T_c Tf=NTc)
测距精度 σ r e s \sigma_{res} σres
测量单目标时的速度测量精度,取决于信噪比。
σ r e s = λ / 3.6 N T c S N R \sigma_{res}=\lambda/{3.6NT_c\sqrt{SNR}} σres=λ/3.6NTcSNR
FOV 探测视角范围
FOV Field of View探测视角范围。
