金字塔池化系列的理解SPP、ASPP
问题
在spp出来之前,所有神经网络都是要输入固定尺寸的图片,比如经常遇到的224×224,图片输入网络前都要resize到224×224,导致图片变形,其中的信息也变形了,从而限制了识别精度。
而SPP和ASPP就是为了解决这个问题,它可以让网络输入原图而不必resize。
SPP结构
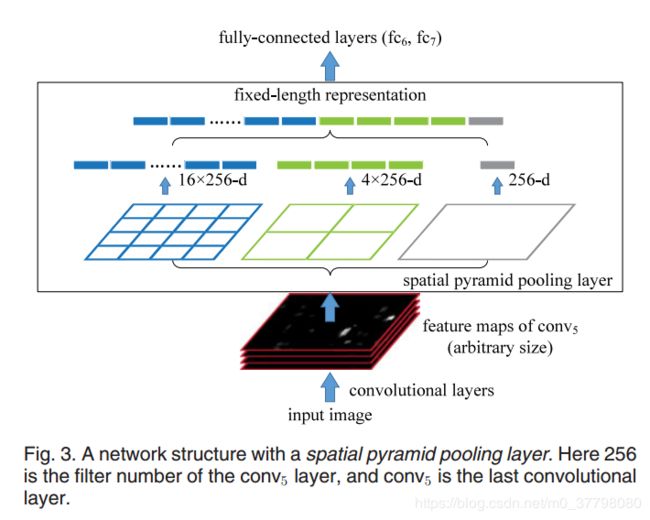
刚看到这张结构图,很多同学可能和我一样懵(原谅我比较笨),别的博客里配的文字也都是比较简单,有些词汇不够通俗,直到我看到了下面这张图: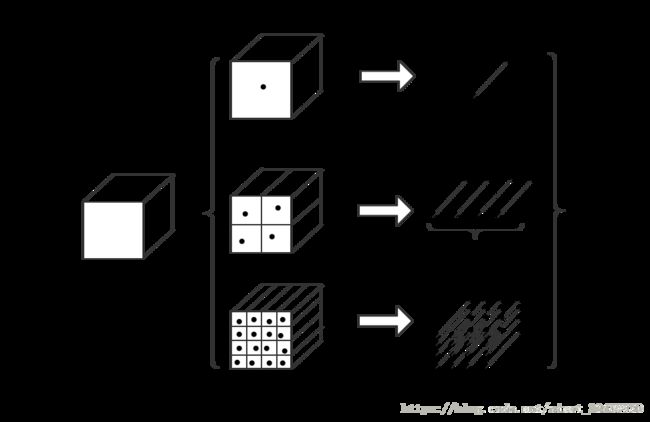 如图所示,最左边的图图形表示卷积得到的256维特征图,对于每个区域(厚度为256),通过三种方式进行池化:
如图所示,最左边的图图形表示卷积得到的256维特征图,对于每个区域(厚度为256),通过三种方式进行池化:
(1)直接对整个特征图池化,每一维得到一个池化后的值,构成一个1x256的向量
(2)将特征图分成2x2共4份,每份单独进行池化,得到一个1x256的向量,最终得到2x2=4个1x256的向量
(3)将特征图分成4x4共16份,每份单独进行池化,得到一个1x256的向量,,最终得到4x4=16个1x256的向量
将三种划分方式池化得到的结果进行拼接,得到(1+4+16)*256=21x256的特征。
由图中可以看出,整个过程对于输入的尺寸大小完全无关,因此可以处理任意尺寸的候选框。
空间池化层实际就是一种自适应的层,这样无论你的输入是什么尺寸,输出都是固定的(21xchannel)
ASPP结构
在介绍ASPP之前,首先要介绍Atrous Convolution(空洞卷积),它是一种增加感受野的方法。空洞卷积是是为了解决基于FCN思想的语义分割中,输出图像的size要求和输入图像的size一致而需要upsample,但由于FCN中使用pooling操作来增大感受野同时降低分辨率,导致upsample无法还原由于pooling导致的一些细节信息的损失的问题而提出的。为了减小这种损失,自然需要移除pooling层,因此空洞卷积应运而生。
普通卷积这里就不介绍了,我们来看一下空洞卷积的动态图,就一目了然了:
空洞卷积从字面上很好理解,是在标准的卷积中注入空洞,以此来增加感受野,相比原来的正常卷积,空洞卷积多了一个称之为 dilation rate 的参数,指的是kernel的间隔数量(一般的卷积 dilation rate=1)。
但是,空洞卷积也有其潜在的一些问题:
潜在问题 1:The Gridding Effect
假设我们仅仅多次叠加 dilation rate 2 的 3 x 3 kernel 的话,则会出现这个问题: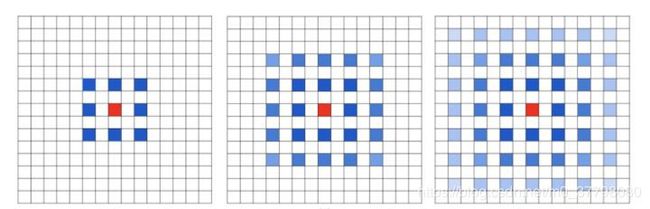
我们发现 kernel 并不连续,也就是并不是所有的 pixel 都用来计算了,因此这里将信息看做 checker-board 的方式会损失信息的连续性。这对 pixel-level dense prediction 的任务来说是致命的。
潜在问题 2:Long-ranged information might be not relevant.
我们从 dilated convolution 的设计背景来看就能推测出这样的设计是用来获取 long-ranged information。然而光采用大 dilation rate 的信息或许只对一些大物体分割有效果,而对小物体来说可能则有弊无利了。如何同时处理不同大小的物体的关系,则是设计好 dilated convolution 网络的关键。
HDC(Hybrid Dilated Convolution)
针对以上几个问题,图森组的文章对其提出了较好的解决的方法。他们设计了一个称之为 HDC 的设计结构。
它有几个特性,可以从一定程度上解决上述问题。这里咱不讨论。我们可以从一张图来对比一下正常空洞卷积与HDC的效果: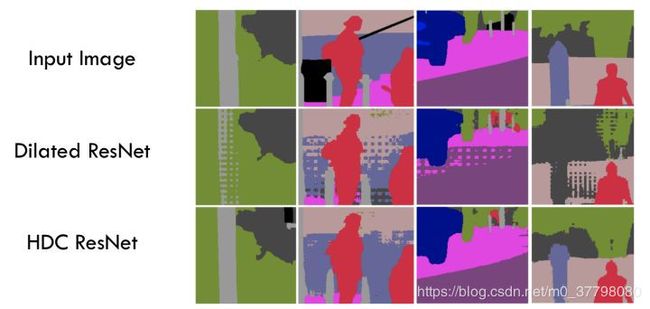
可以看到经过卷积之后,HDC能够获得更多的图像信息,不会出现像正常空洞卷积一样的小方块。
Atrous Spatial Pyramid Pooling (ASPP)
首先看一下ASPP的结构图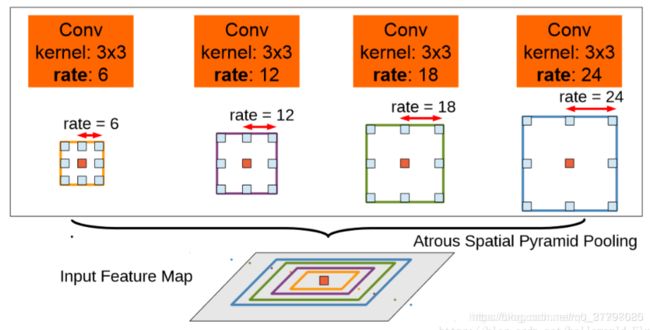
这里设计了几种不同采样率的空洞卷积来捕捉多尺度信息,但我们要明白采样率(dilation rate)并不是越大越好,因为采样率太大,会导致滤波器有的会跑到padding上,产生无意义的权重,因此要选择合适的采样率。
参考链接
https://blog.csdn.net/sinat_33486980/article/details/81902746
https://www.cnblogs.com/bupt213/p/10823653.html