PointNet++分割预测结果可视化
目前网上对于PointNet++的预测结果可视化的资料比较少,一般都是直接可视化数据集。下面介绍一种我利用Matplotlib可视化预测的代码,希望能够对大家有所帮助。
原理:
简单阐述一下代码的原理,首先我们利用generate_predict_to_txt函数让网络出输入图像的预测结果,并存入为txt文件;然后利用draw_3d_img函数调用Matplotlib读取txt文件,画出3d图像。
由于点云数据集在训练的时候是需要进行采样操作的,因此在进行预测的时候也会进行采样。如果要同时比较多个模型,那么会因为采样点的不同存在细微差异,因此,我们可以同时将多个模型一起预测,使用相同的输入图像,这样就能够保证采样的点是一样的。
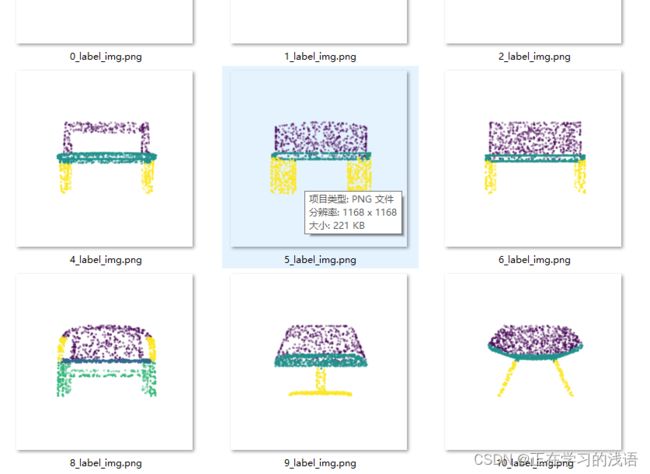
预测效果
由于3d图像无法直接显示,需要特定的软件才行,因此我们只能将它转换为2d图像报错,其结果如下
准备材料
1)网络模型。本代码是基于 pytorch版的PointNet++实现的,所以网络模型的输入输出格式要保持一致。(代码中会在相应位置进行注释)
2)数据集。既然都准备预测结果了,应该对网络的整体流程都有一个比较详细的理解了,数据集的准备在这里就不详细介绍了。需要注意的是,不同的数据集输出的内容不一样。例如ShapeNet会输出点云图像,Label(分类类别)和target(分割类别),而S3DIS就只会输出点云图像和分割类别。这里就需要我们进行调整一下。
3)训练好的权重文件。将训练好的权重文件以PointNet++的格式保存。
准备好以上材料就可以开始准备生成预测结果了。
主要代码
"传入模型权重文件,读取预测点,生成预测的txt文件"
import tqdm
import matplotlib.pyplot as plt
import matplotlib
import torch
import os
import json
import warnings
import numpy as np
from torch.utils.data import Dataset
warnings.filterwarnings('ignore')
matplotlib.use("Agg")
def pc_normalize(pc):
centroid = np.mean(pc, axis=0)
pc = pc - centroid
m = np.max(np.sqrt(np.sum(pc ** 2, axis=1)))
pc = pc / m
return pc
class PartNormalDataset(Dataset):
def __init__(self,root = './data/shapenetcore_partanno_segmentation_benchmark_v0_normal', npoints=2500, split='train', class_choice=None, normal_channel=False):
self.npoints = npoints # 采样点数
self.root = root # 文件根路径
self.catfile = os.path.join(self.root, 'synsetoffset2category.txt') # 类别和文件夹名字对应的路径
self.cat = {}
self.normal_channel = normal_channel # 是否使用rgb信息
with open(self.catfile, 'r') as f:
for line in f:
ls = line.strip().split()
self.cat[ls[0]] = ls[1]
self.cat = {k: v for k, v in self.cat.items()} #{'Airplane': '02691156', 'Bag': '02773838', 'Cap': '02954340', 'Car': '02958343', 'Chair': '03001627', 'Earphone': '03261776', 'Guitar': '03467517', 'Knife': '03624134', 'Lamp': '03636649', 'Laptop': '03642806', 'Motorbike': '03790512', 'Mug': '03797390', 'Pistol': '03948459', 'Rocket': '04099429', 'Skateboard': '04225987', 'Table': '04379243'}
self.classes_original = dict(zip(self.cat, range(len(self.cat)))) #{'Airplane': 0, 'Bag': 1, 'Cap': 2, 'Car': 3, 'Chair': 4, 'Earphone': 5, 'Guitar': 6, 'Knife': 7, 'Lamp': 8, 'Laptop': 9, 'Motorbike': 10, 'Mug': 11, 'Pistol': 12, 'Rocket': 13, 'Skateboard': 14, 'Table': 15}
if not class_choice is None: # 选择一些类别进行训练 好像没有使用这个功能
self.cat = {k:v for k,v in self.cat.items() if k in class_choice}
# print(self.cat)
self.meta = {} # 读取分好类的文件夹jason文件 并将他们的名字放入列表中
with open(os.path.join(self.root, 'train_test_split', 'shuffled_train_file_list.json'), 'r') as f:
train_ids = set([str(d.split('/')[2]) for d in json.load(f)]) # '928c86eabc0be624c2bf2dcc31ba1713' 这是第一个值
with open(os.path.join(self.root, 'train_test_split', 'shuffled_val_file_list.json'), 'r') as f:
val_ids = set([str(d.split('/')[2]) for d in json.load(f)])
with open(os.path.join(self.root, 'train_test_split', 'shuffled_test_file_list.json'), 'r') as f:
test_ids = set([str(d.split('/')[2]) for d in json.load(f)])
for item in self.cat:
self.meta[item] = []
dir_point = os.path.join(self.root, self.cat[item]) # # 拿到对应一个文件夹的路径 例如第一个文件夹02691156
fns = sorted(os.listdir(dir_point)) # 根据路径拿到文件夹下的每个txt文件 放入列表中
# print(fns[0][0:-4])
if split == 'trainval':
fns = [fn for fn in fns if ((fn[0:-4] in train_ids) or (fn[0:-4] in val_ids))]
elif split == 'train':
fns = [fn for fn in fns if fn[0:-4] in train_ids] # 判断文件夹中的txt文件是否在 训练txt中,如果是,那么fns中拿到的txt文件就是这个类别中所有txt文件中需要训练的文件,放入fns中
elif split == 'val':
fns = [fn for fn in fns if fn[0:-4] in val_ids]
elif split == 'test':
fns = [fn for fn in fns if fn[0:-4] in test_ids]
else:
print('Unknown split: %s. Exiting..' % (split))
exit(-1)
# print(os.path.basename(fns))
for fn in fns:
"第i次循环 fns中拿到的是第i个文件夹中符合训练的txt文件夹的名字"
token = (os.path.splitext(os.path.basename(fn))[0])
self.meta[item].append(os.path.join(dir_point, token + '.txt')) # 生成一个字典,将类别名字和训练的路径组合起来 作为一个大类中符合训练的数据
#上面的代码执行完之后,就实现了将所有需要训练或验证的数据放入了一个字典中,字典的键是该数据所属的类别,例如飞机。值是他对应数据的全部路径
#{Airplane:[路径1,路径2........]}
#####################################################################################################################################################
self.datapath = []
for item in self.cat: # self.cat 是类别名称和文件夹对应的字典
for fn in self.meta[item]:
self.datapath.append((item, fn)) # 生成标签和点云路径的元组, 将self.met 中的字典转换成了一个元组
self.classes = {}
for i in self.cat.keys():
self.classes[i] = self.classes_original[i]
## self.classes 将类别的名称和索引对应起来 例如 飞机 <----> 0
# Mapping from category ('Chair') to a list of int [10,11,12,13] as segmentation labels
"""
shapenet 有16 个大类,然后每个大类有一些部件 ,例如飞机 'Airplane': [0, 1, 2, 3] 其中标签为0 1 2 3 的四个小类都属于飞机这个大类
self.seg_classes 就是将大类和小类对应起来
"""
self.seg_classes = {'Earphone': [16, 17, 18], 'Motorbike': [30, 31, 32, 33, 34, 35], 'Rocket': [41, 42, 43],
'Car': [8, 9, 10, 11], 'Laptop': [28, 29], 'Cap': [6, 7], 'Skateboard': [44, 45, 46],
'Mug': [36, 37], 'Guitar': [19, 20, 21], 'Bag': [4, 5], 'Lamp': [24, 25, 26, 27],
'Table': [47, 48, 49], 'Airplane': [0, 1, 2, 3], 'Pistol': [38, 39, 40],
'Chair': [12, 13, 14, 15], 'Knife': [22, 23]}
# for cat in sorted(self.seg_classes.keys()):
# print(cat, self.seg_classes[cat])
self.cache = {} # from index to (point_set, cls, seg) tuple
self.cache_size = 20000
def __getitem__(self, index):
if index in self.cache: # 初始slef.cache为一个空字典,这个的作用是用来存放取到的数据,并按照(point_set, cls, seg)放好 同时避免重复采样
point_set, cls, seg = self.cache[index]
else:
fn = self.datapath[index] # 根据索引 拿到训练数据的路径self.datepath是一个元组(类名,路径)
cat = self.datapath[index][0] # 拿到类名
cls = self.classes[cat] # 将类名转换为索引
cls = np.array([cls]).astype(np.int32)
data = np.loadtxt(fn[1]).astype(np.float32) # size 20488,7 读入这个txt文件,共20488个点,每个点xyz rgb +小类别的标签
if not self.normal_channel: # 判断是否使用rgb信息
point_set = data[:, 0:3]
else:
point_set = data[:, 0:6]
seg = data[:, -1].astype(np.int32) # 拿到小类别的标签
if len(self.cache) < self.cache_size:
self.cache[index] = (point_set, cls, seg)
point_set[:, 0:3] = pc_normalize(point_set[:, 0:3]) # 做一个归一化
choice = np.random.choice(len(seg), self.npoints, replace=True) # 对一个类别中的数据进行随机采样 返回索引,允许重复采样
# resample
point_set = point_set[choice, :] # 根据索引采样
seg = seg[choice]
return point_set, cls, seg # pointset是点云数据,cls十六个大类别,seg是一个数据中,不同点对应的小类别
def __len__(self):
return len(self.datapath)
class S3DISDataset(Dataset):
def __init__(self, split='train', data_root='trainval_fullarea', num_point=4096, test_area=5, block_size=1.0, sample_rate=1.0, transform=None):
super().__init__()
self.num_point = num_point # 4096
self.block_size = block_size # 1.0
self.transform = transform
rooms = sorted(os.listdir(data_root)) # data_root = 'data/s3dis/stanford_indoor3d/'
rooms = [room for room in rooms if 'Area_' in room] # 'Area_1_WC_1.npy' # 'Area_1_conferenceRoom_1.npy'
"rooms里面存放的是之前转换好的npy数据的名字,例如:Area_1_conferenceRoom1.npy....这样的数据"
if split == 'train':
rooms_split = [room for room in rooms if not 'Area_{}'.format(test_area) in room] # area 1,2,3,4,6为训练区域,5为测试区域
else:
rooms_split = [room for room in rooms if 'Area_{}'.format(test_area) in room]
"按照指定的test_area划分为训练集和测试集,默认是将区域5作为测试集"
#创建一些储存数据的列表
self.room_points, self.room_labels = [], [] # 每个房间的点云和标签
self.room_coord_min, self.room_coord_max = [], [] # 每个房间的最大值和最小值
num_point_all = [] # 初始化每个房间点的总数的列表
labelweights = np.zeros(13) # 初始标签权重,后面用来统计标签的权重
#每层初始化数据集的时候会执行以下代码
for room_name in tqdm.tqdm(rooms_split, total=len(rooms_split)):
#每次拿到的room_namej就是之前划分好的'Area_1_WC_1.npy'
room_path = os.path.join(data_root, room_name) #每个小房间的绝对路径,根路径+.npy
room_data = np.load(room_path) # 加载数据 xyzrgbl, (1112933, 7) N*7 room中点云的值 最后一个是标签#
points, labels = room_data[:, 0:6], room_data[:, 6] # xyzrgb, N*6; l, N 将训练数据与标签分开
"前面已经将标签进行了分离,那么这里 np.histogram就是统计每个房间里所有标签的总数,例如,第一个元素就是属于类别0的点的总数"
"将数据集所有点统计一次之后,就知道每个类别占总类别的比例,为后面加权计算损失做准备"
tmp, _ = np.histogram(labels, range(14)) # 统计标签的分布情况 [192039 185764 488740 0 0 0 28008 0 0 0, 0 0 218382]
#也就是有多少个点属于第i个类别
labelweights += tmp # 将它们累计起来
coord_min, coord_max = np.amin(points, axis=0)[:3], np.amax(points, axis=0)[:3] # 获取当前房间坐标的最值
self.room_points.append(points), self.room_labels.append(labels)
self.room_coord_min.append(coord_min), self.room_coord_max.append(coord_max)
num_point_all.append(labels.size) # 标签的数量 也就是点的数量
"通过for循环后,所有的房间里类别分布情况和坐标情况都被放入了相应的变量中,后面就是计算权重了"
labelweights = labelweights.astype(np.float32)
labelweights = labelweights / np.sum(labelweights) # 计算标签的权重,每个类别的点云总数/总的点云总数
"感觉这里应该是为了避免有的点数量比较少,计算出训练的iou占miou的比重太大,所以在这里计算一下加权(根据点标签的数量进行加权)"
self.labelweights = np.power(np.amax(labelweights) / labelweights, 1 / 3.0) # 为什么这里还要开三次方???
print('label weight\n')
print(self.labelweights)
sample_prob = num_point_all / np.sum(num_point_all) # 每个房间占总的房间的比例
num_iter = int(np.sum(num_point_all) * sample_rate / num_point) # 如果按 sample rate进行采样,那么每个区域用4096个点 计算需要采样的次数
room_idxs = []
# 这里求的应该就是一个划分房间的索引
for index in range(len(rooms_split)):
room_idxs.extend([index] * int(round(sample_prob[index] * num_iter)))
self.room_idxs = np.array(room_idxs)
print("Totally {} samples in {} set.".format(len(self.room_idxs), split))
def __getitem__(self, idx):
room_idx = self.room_idxs[idx]
points = self.room_points[room_idx] # N * 6 --》 debug 1112933,6
labels = self.room_labels[room_idx] # N
N_points = points.shape[0]
while (True): # 这里是不是对应的就是将一个房间的点云切分为一个区域
center = points[np.random.choice(N_points)][:3] #从该个房间随机选一个点作为中心点
block_min = center - [self.block_size / 2.0, self.block_size / 2.0, 0]
block_max = center + [self.block_size / 2.0, self.block_size / 2.0, 0]
"找到符合要求点的索引(min<=x,y,z<=max),坐标被限制在最小和最大值之间"
point_idxs = np.where((points[:, 0] >= block_min[0]) & (points[:, 0] <= block_max[0]) & (points[:, 1] >= block_min[1]) & (points[:, 1] <= block_max[1]))[0]
"如果符合要求的点至少有1024个,那么跳出循环,否则继续随机选择中心点,继续寻找"
if point_idxs.size > 1024:
break
"这里可以尝试修改一下1024这个参数,感觉采4096个点的话,可能存在太多重复的点"
if point_idxs.size >= self.num_point: # 如果找到符合条件的点大于给定的4096个点,那么随机采样4096个点作为被选择的点
selected_point_idxs = np.random.choice(point_idxs, self.num_point, replace=False)
else:# 如果符合条件的点小于4096 则随机重复采样凑够4096个点
selected_point_idxs = np.random.choice(point_idxs, self.num_point, replace=True) #
# normalize
selected_points = points[selected_point_idxs, :] # num_point * 6 拿到筛选后的4096个点
current_points = np.zeros((self.num_point, 9)) # num_point * 9
current_points[:, 6] = selected_points[:, 0] / self.room_coord_max[room_idx][0] # 选择点的坐标/被选择房间的最大值 做坐标的归一化
current_points[:, 7] = selected_points[:, 1] / self.room_coord_max[room_idx][1]
current_points[:, 8] = selected_points[:, 2] / self.room_coord_max[room_idx][2]
selected_points[:, 0] = selected_points[:, 0] - center[0] # 再将坐标移至随机采样的中心点
selected_points[:, 1] = selected_points[:, 1] - center[1]
selected_points[:, 3:6] /= 255.0 # 颜色信息归一化
current_points[:, 0:6] = selected_points
current_labels = labels[selected_point_idxs]
if self.transform is not None:
current_points, current_labels = self.transform(current_points, current_labels)
return current_points, current_labels, current_labels
def __len__(self):
return len(self.room_idxs)
class Generate_txt_and_3d_img:
def __init__(self,img_root,target_root,num_classes,testDataLoader,model_dict,color_map=None):
self.img_root = img_root # 点云数据路径
self.target_root = target_root # 生成txt标签和预测结果路径
self.testDataLoader = testDataLoader
self.num_classes = num_classes
self.color_map = color_map
self.heat_map = False # 控制是否输出heatmap
self.label_path_txt = os.path.join(self.target_root, 'label_txt') # 存放label的txt文件
self.make_dir(self.label_path_txt)
# 拿到模型 并加载权重
self.model_name = []
self.model = []
self.model_weight_path = []
for k,v in model_dict.items():
self.model_name.append(k)
self.model.append(v[0])
self.model_weight_path.append(v[1])
# 加载权重
self.load_cheackpoint_for_models(self.model_name,self.model,self.model_weight_path)
# 创建文件夹
self.all_pred_image_path = [] # 所有预测结果的路径列表
self.all_pred_txt_path = [] # 所有预测txt的路径列表
for n in self.model_name:
self.make_dir(os.path.join(self.target_root,n+'_predict_txt'))
self.make_dir(os.path.join(self.target_root, n + '_predict_image'))
self.all_pred_txt_path.append(os.path.join(self.target_root,n+'_predict_txt'))
self.all_pred_image_path.append(os.path.join(self.target_root, n + '_predict_image'))
"将模型对应的预测txt结果和img结果生成出来,对应几个模型就在列表中添加几个元素"
self.generate_predict_to_txt() # 生成预测txt
self.draw_3d_img() # 画图
def generate_predict_to_txt(self):
for batch_id, (points, label, target) in tqdm.tqdm(enumerate(self.testDataLoader),
total=len(self.testDataLoader),smoothing=0.9):
#点云数据、整个图像的标签、每个点的标签、 没有归一化的点云数据(带标签)torch.Size([1, 7, 2048])
points = points.transpose(2, 1)
#print('1',target.shape) # 1 torch.Size([1, 2048])
xyz_feature_point = points[:, :6, :]
# 将标签保存为txt文件
point_set_without_normal = np.asarray(torch.cat([points.permute(0, 2, 1),target[:,:,None]],dim=-1)).squeeze(0) # 代标签 没有归一化的点云数据 的numpy形式
np.savetxt(os.path.join(self.label_path_txt,f'{batch_id}_label.txt'), point_set_without_normal, fmt='%.04f') # 将其存储为txt文件
" points torch.Size([16, 2048, 6]) label torch.Size([16, 1]) target torch.Size([16, 2048])"
assert len(self.model) == len(self.all_pred_txt_path) , '路径与模型数量不匹配,请检查'
for n,model,pred_path in zip(self.model_name,self.model,self.all_pred_txt_path):
seg_pred, trans_feat = model(points, self.to_categorical(label, 16))
seg_pred = seg_pred.cpu().data.numpy()
#=================================================
#seg_pred = np.argmax(seg_pred, axis=-1) # 获得网络的预测结果 b n c
if self.heat_map:
out = np.asarray(np.sum(seg_pred,axis=2))
seg_pred = ((out - np.min(out) / (np.max(out) - np.min(out))))
else:
seg_pred = np.argmax(seg_pred, axis=-1) # 获得网络的预测结果 b n c
#=================================================
seg_pred = np.concatenate([np.asarray(xyz_feature_point), seg_pred[:, None, :]],
axis=1).transpose((0, 2, 1)).squeeze(0) # 将点云与预测结果进行拼接,准备生成txt文件
svae_path = os.path.join(pred_path, f'{n}_{batch_id}.txt')
np.savetxt(svae_path,seg_pred, fmt='%.04f')
def draw_3d_img(self):
# 调用matpltlib 画3d图像
each_label = os.listdir(self.label_path_txt) # 所有标签txt路径
self.label_path_3d_img = os.path.join(self.target_root, 'label_3d_img')
self.make_dir(self.label_path_3d_img)
assert len(self.all_pred_txt_path) == len(self.all_pred_image_path)
for i,(pre_txt_path,save_img_path,name) in enumerate(zip(self.all_pred_txt_path,self.all_pred_image_path,self.model_name)):
each_txt_path = os.listdir(pre_txt_path) # 拿到txt文件的全部名字
for idx,(txt,lab) in tqdm.tqdm(enumerate(zip(each_txt_path,each_label)),total=len(each_txt_path)):
if i == 0:
self.draw_each_img(os.path.join(self.label_path_txt, lab), idx,heat_maps=False)
self.draw_each_img(os.path.join(pre_txt_path,txt),idx,name=name,save_path=save_img_path,heat_maps=self.heat_map)
print(f'所有预测图片已生成完毕,请前往:{self.all_pred_image_path} 查看')
def draw_each_img(self,root,idx,name=None,skip=1,save_path=None,heat_maps=False):
"root:每个txt文件的路径"
points = np.loadtxt(root)[:, :3] # 点云的xyz坐标
points_all = np.loadtxt(root) # 点云的所有坐标
points = self.pc_normalize(points)
skip = skip # Skip every n points
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
point_range = range(0, points.shape[0], skip) # skip points to prevent crash
x = points[point_range, 0]
z = points[point_range, 1]
y = points[point_range, 2]
"根据传入的类别数 自定义生成染色板 标签 0对应 随机颜色1 标签1 对应随机颜色2"
if self.color_map is not None:
color_map = self.color_map
else:
color_map = {idx: i for idx, i in enumerate(np.linspace(0, 0.9, num_classes))}
Label = points_all[point_range, -1] # 拿到标签
# 将标签传入前面的字典,找到对应的颜色 并放入列表
Color = list(map(lambda x: color_map[x], Label))
ax.scatter(x, # x
y, # y
z, # z
c=Color, # Color, # height data for color
s=25,
marker=".")
ax.axis('auto') # {equal, scaled}
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
ax.axis('off') # 设置坐标轴不可见
ax.grid(False) # 设置背景网格不可见
ax.view_init(elev=0, azim=0)
if save_path is None:
plt.savefig(os.path.join(self.label_path_3d_img,f'{idx}_label_img.png'), dpi=300,bbox_inches='tight',transparent=True)
else:
plt.savefig(os.path.join(save_path, f'{idx}_{name}_img.png'), dpi=300, bbox_inches='tight',
transparent=True)
def pc_normalize(self,pc):
l = pc.shape[0]
centroid = np.mean(pc, axis=0)
pc = pc - centroid
m = np.max(np.sqrt(np.sum(pc ** 2, axis=1)))
pc = pc / m
return pc
def make_dir(self, root):
if os.path.exists(root):
print(f'{root} 路径已存在 无需创建')
else:
os.mkdir(root)
def to_categorical(self,y, num_classes):
""" 1-hot encodes a tensor """
new_y = torch.eye(num_classes)[y.cpu().data.numpy(),]
if (y.is_cuda):
return new_y.cuda()
return new_y
def load_cheackpoint_for_models(self,name,model,cheackpoints):
assert cheackpoints is not None,'请填写权重文件'
assert model is not None, '请实例化模型'
for n,m,c in zip(name,model,cheackpoints):
print(f'正在加载{n}的权重.....')
weight_dict = torch.load(os.path.join(c,'best_model.pth'))
m.load_state_dict(weight_dict['model_state_dict'])
print(f'{n}权重加载完毕')
if __name__ =='__main__':
import copy
img_root = r'你的数据集路径' # 数据集路径
target_root = r'保存预测结果的路径' # 输出结果路径
num_classes = 13 # 填写数据集的类别数 如果是s3dis这里就填13 shapenet这里就填50
choice_dataset = 'S3dis' # 预测ShapNet数据集
# 导入模型 部分
"所有的模型以PointNet++为标准 输入两个参数 输出两个参数,如果模型仅输出一个,可以将其修改为多输出一个None!!!!"
#==============================================
from models.pointnet2_sem_seg import get_model as pointnet2
from models.finally_csa_part_seg import get_model as csa
from models.pointcouldtransformer_part_seg import get_model as pct
model1 = pointnet2(num_classes=num_classes).eval()
model2 = csa(num_classes, normal_channel=True).eval()
model3 = pct(num_class=num_classes,normal_channel=False).eval()
#============================================
# 实例化数据集
"Dataset同理,都按ShapeNet格式输出三个变量 point_set, cls, seg # pointset是点云数据,cls十六个大类别,seg是一个数据中,不同点对应的小类别"
"不是这个格式的话就手动添加一个"
if choice_dataset == 'ShapeNet':
print('实例化ShapeNet')
TEST_DATASET = PartNormalDataset(root=img_root, npoints=2048, split='test', normal_channel=True)
testDataLoader = torch.utils.data.DataLoader(TEST_DATASET, batch_size=1, shuffle=False, num_workers=0,
drop_last=True)
color_map = {idx: i for idx, i in enumerate(np.linspace(0, 0.9, num_classes))}
else:
TEST_DATASET = S3DISDataset(split='test', data_root=img_root, num_point=4096, test_area=5,
block_size=1.0, sample_rate=1.0, transform=None)
testDataLoader = torch.utils.data.DataLoader(TEST_DATASET, batch_size=1, shuffle=False, num_workers=0,
pin_memory=True, drop_last=True)
color_maps = [(152, 223, 138), (174, 199, 232), (255, 127, 14), (91, 163, 138), (255, 187, 120), (188, 189, 34),
(140, 86, 75)
, (255, 152, 150), (214, 39, 40), (197, 176, 213), (196, 156, 148), (23, 190, 207), (112, 128, 144)]
color_map = []
for i in color_maps:
tem = ()
for j in i:
j = j / 255
tem += (j,)
color_map.append(tem)
print('实例化S3DIS')
#将模型和权重路径填写到字典中,以下面这个格式填写就可以了
# 如果加载权重报错,可以查看类里面的加载权重部分,进行对应修改即可
model_dict = {
'PonintNet': [model1,r'权重路径1'],
'CSA': [model2, r'权重路径2'],
'PCT': [model3,r'权重路径3']
}
c = Generate_txt_and_3d_img(img_root,target_root,num_classes,testDataLoader,model_dict,color_map)
通过这个脚本就能实现利用matplotlib画出预结果了。这些代码都是基于PointNet++的,所以在预测时候应该属性PointNet++代码。一些注意点在代码中进行了注释和说明,在这里再次强调一下:
1.所以模型都是两输入两输出
2.记得导入数据集,数据集默认以ShapNet为模板 输出三个值,具体可见ShapeNet数据集。(数据集的导入没有放进来,如有需要记得自己导入)。训练和预测的数据集的预处理一定要一样,否则预测效果会很差。
3.所有模型和权重都要放在那个model_dict中
4.如果觉得保存的图像视角比较怪, 可以通过ax.view_init(elev=0, azim=0)设置角度
5.如果你训练的时候使用了RGB信息,也就是Use_normal为True,那么在预测的时候导入模型的时候应该也这样设置,否则权重导入部分会报错。
开头部分强调
开头导入部分
"传入模型权重文件,读取预测点,生成预测的txt文件"
import tqdm
import matplotlib.pyplot as plt
import matplotlib
import torch
import os
import json
import warnings
import numpy as np
from torch.utils.data import Dataset
warnings.filterwarnings('ignore')
matplotlib.use("Agg")
def pc_normalize(pc):
centroid = np.mean(pc, axis=0)
pc = pc - centroid
m = np.max(np.sqrt(np.sum(pc ** 2, axis=1)))
pc = pc / m
return pc
这里一定要加
warnings.filterwarnings('ignore')
matplotlib.use("Agg")
这两行代码,否则在画图的时候会导致中断。Matplotlib的画图程序好像不能一次画太多,如果太多了可能会报错(大概要超出1w多张吧)。
shapenet的颜色是随机生成的,s3dis的颜色是根据给定参数生成的,如果大家需要修改输出图像的颜色,可以通过适当调整heat_map进行颜色调整。
以上代码纯属自己手码,我使用是没有问题的。如果有什么问题,大家可以阅读一下代码进行对应调整或在评论区留言,希望能够帮到大家。
参考:
https://blog.csdn.net/ssq183/article/details/104603454/
最后,大家一定要记得:
