canny算子的python实现以及pytorch实现
canny算子的python实现以及pytorch实现
- canny的python实现
- canny的pytorch实现
canny的python实现
参考Canny边缘检测算法(python 实现)
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
def smooth(image, sigma = 1.4, length = 5) :
""" Smooth the image
Compute a gaussian filter with sigma = sigma and kernal_length = length.
Each element in the kernal can be computed as below:
G[i, j] = (1/(2*pi*sigma**2))*exp(-((i-k-1)**2 + (j-k-1)**2)/2*sigma**2)
Then, use the gaussian filter to smooth the input image.
Args:
image: array of grey image
sigma: the sigma of gaussian filter, default to be 1.4
length: the kernal length, default to be 5
Returns:
the smoothed image
"""
# Compute gaussian filter
k = length // 2
gaussian = np.zeros([length, length])
for i in range(length) :
for j in range(length) :
gaussian[i, j] = np.exp(-((i - k) ** 2 + (j - k) ** 2) / (2 * sigma ** 2))
gaussian /= 2 * np.pi * sigma ** 2
# Batch Normalization
gaussian = gaussian / np.sum(gaussian)
# Use Gaussian Filter
W, H = image.shape
new_image = np.zeros([W - k * 2, H - k * 2])
for i in range(W - 2 * k) :
for j in range(H - 2 * k) :
# 卷积运算
new_image[i, j] = np.sum(image[i :i + length, j :j + length] * gaussian)
new_image = np.uint8(new_image)
return new_image
def get_gradient_and_direction(image) :
""" Compute gradients and its direction
Use Sobel filter to compute gradients and direction.
-1 0 1 -1 -2 -1
Gx = -2 0 2 Gy = 0 0 0
-1 0 1 1 2 1
Args:
image: array of grey image
Returns:
gradients: the gradients of each pixel
direction: the direction of the gradients of each pixel
"""
Gx = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
Gy = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
W, H = image.shape
gradients = np.zeros([W - 2, H - 2])
direction = np.zeros([W - 2, H - 2])
for i in range(W - 2) :
for j in range(H - 2) :
dx = np.sum(image[i :i + 3, j :j + 3] * Gx)
dy = np.sum(image[i :i + 3, j :j + 3] * Gy)
gradients[i, j] = np.sqrt(dx ** 2 + dy ** 2)
if dx == 0 :
direction[i, j] = np.pi / 2
else :
direction[i, j] = np.arctan(dy / dx)
# gradients = np.uint8(gradients)
return gradients, direction
def NMS(gradients, direction) :
""" Non-maxima suppression
Args:
gradients: the gradients of each pixel
direction: the direction of the gradients of each pixel
Returns:
the output image
"""
W, H = gradients.shape
nms = np.copy(gradients[1 :-1, 1 :-1])
for i in range(1, W - 1) :
for j in range(1, H - 1) :
theta = direction[i, j]
weight = np.tan(theta)
if theta > np.pi / 4 :
d1 = [0, 1]
d2 = [1, 1]
weight = 1 / weight
elif theta >= 0 :
d1 = [1, 0]
d2 = [1, 1]
elif theta >= - np.pi / 4 :
d1 = [1, 0]
d2 = [1, -1]
weight *= -1
else :
d1 = [0, -1]
d2 = [1, -1]
weight = -1 / weight
g1 = gradients[i + d1[0], j + d1[1]]
g2 = gradients[i + d2[0], j + d2[1]]
g3 = gradients[i - d1[0], j - d1[1]]
g4 = gradients[i - d2[0], j - d2[1]]
grade_count1 = g1 * weight + g2 * (1 - weight)
grade_count2 = g3 * weight + g4 * (1 - weight)
if grade_count1 > gradients[i, j] or grade_count2 > gradients[i, j] :
nms[i - 1, j - 1] = 0
return nms
def double_threshold(nms, threshold1, threshold2) :
""" Double Threshold
Use two thresholds to compute the edge.
Args:
nms: the input image
threshold1: the low threshold
threshold2: the high threshold
Returns:
The binary image.
"""
visited = np.zeros_like(nms)
output_image = nms.copy()
W, H = output_image.shape
def dfs(i, j) :
if i >= W or i < 0 or j >= H or j < 0 or visited[i, j] == 1 :
return
visited[i, j] = 1
if output_image[i, j] > threshold1 :
output_image[i, j] = 255
dfs(i - 1, j - 1)
dfs(i - 1, j)
dfs(i - 1, j + 1)
dfs(i, j - 1)
dfs(i, j + 1)
dfs(i + 1, j - 1)
dfs(i + 1, j)
dfs(i + 1, j + 1)
else :
output_image[i, j] = 0
for w in range(W) :
for h in range(H) :
if visited[w, h] == 1 :
continue
if output_image[w, h] >= threshold2 :
dfs(w, h)
elif output_image[w, h] <= threshold1 :
output_image[w, h] = 0
visited[w, h] = 1
for w in range(W) :
for h in range(H) :
if visited[w, h] == 0 :
output_image[w, h] = 0
return output_image
if __name__ == "__main__" :
# code to read image
i = cv.imread('test.png')
image = cv.imread('test.png', 0)
cv.imshow("Original", image)
smoothed_image = smooth(image)
cv.imshow("GaussinSmooth(5*5)", smoothed_image)
gradients, direction = get_gradient_and_direction(smoothed_image)
# print(gradients)
# print(direction)
nms = NMS(gradients, direction)
output_image = double_threshold(nms, 40, 100)
cv.imshow("outputImage", output_image)
cv.waitKey(0)
得到的结果:

然而这种方法由于使用了如下的语句,使得运行速度很慢
for w in range(W) :
for h in range(H) :
...
基于此的pytorch方法的代码如下所示
import torch
from torch import nn
import numpy as np
import cv2
from torch.nn import functional as F
class GaussianConv(nn.Module):
def __init__(self, kernel_size = 5, sigma = 1):
super(GaussianConv, self).__init__()
self.kernel_size = kernel_size
self.sigma = sigma
self.k = self.kernel_size // 2
gaussian_matrix = torch.zeros(self.kernel_size, self.kernel_size)
tmp = torch.arange(self.kernel_size) - self.k
x, y = torch.meshgrid(tmp, tmp)
# for i in range(self.kernel_size):
# for j in range(self.kernel_size):
# i = torch.tensor(i)
# j = torch.tensor(j)
# gaussian_matrix[i, j] = torch.exp(-((i - self.k) ** 2 + (j - self.k) ** 2) / (2 * sigma ** 2))
gaussian_matrix = 2 * np.pi * sigma**2 * torch.exp(-(x **2 + y**2) / (2 * sigma**2))
gaussian_matrix = gaussian_matrix / torch.sum(gaussian_matrix)
gaussian_matrix = gaussian_matrix.unsqueeze(0)
self.gaussian_filter = nn.Conv2d(in_channels = 1, out_channels = 1, kernel_size = self.kernel_size,
bias = False, stride = 1, padding = self.k, padding_mode = 'replicate')
self.gaussian_filter.weight.data[:] = nn.Parameter(gaussian_matrix, requires_grad = False)
def forward(self, img):
B, C, H, W = img.shape
out = self.gaussian_filter(img)
return out
class cal_gradient_and_direction(nn.Module):
""" Compute gradients and its direction
Use Sobel filter to compute gradients and direction.
[-1 0 1 -1 -2 -1
Gx = [-2 0 2 Gy = 0 0 0
[-1 0 1 1 2 1
Args:
image: array of grey image
Returns:
gradients: the gradients of each pixel
direction: the direction of the gradients of each pixel
"""
def __init__(self):
super(cal_gradient_and_direction, self).__init__()
sobel_x_weight = torch.tensor([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
sobel_y_weight = torch.tensor([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
self.sobel_x = nn.Conv2d(in_channels = 1, out_channels = 1, kernel_size = 3,
bias = False, stride = 1, padding = 1, padding_mode = 'replicate')
self.sobel_x.weight.data[:] = nn.Parameter(sobel_x_weight, requires_grad = False)
self.sobel_y = nn.Conv2d(in_channels = 1, out_channels = 1, kernel_size = 3,
bias = False, stride = 1, padding = 1, padding_mode = 'replicate')
self.sobel_y.weight.data[:] = nn.Parameter(sobel_y_weight, requires_grad = False)
def forward(self, img):
B, C, H, W = img.shape
dx = self.sobel_x(img)
dy = self.sobel_y(img)
gradients = torch.sqrt(dx ** 2 + dy ** 2)
direction = torch.atan(dy / dx)
return gradients, direction
class NMS(nn.Module):
def __init__(self):
super(NMS, self).__init__()
def forward(self, gradients, directions):
B, C, H, W = gradients.shape
out = []
for gradient, direction in zip(gradients, directions):
nms = gradient[0, 1:-1, 1:-1].clone()
for h in range(1, H-1):
for w in range(1, W - 1) :
theta = direction[0, h, w]
weight = torch.tan(theta)
if theta > torch.tensor(np.pi) / 4 :
d1 = torch.tensor([0, 1])
d2 = torch.tensor([1, 1])
weight = 1 / weight
elif theta >= 0 :
d1 = torch.tensor([1, 0])
d2 = torch.tensor([1, 1])
elif theta >= - torch.tensor(np.pi) / 4 :
d1 = torch.tensor([1, 0])
d2 = torch.tensor([1, -1])
weight *= -1
else :
d1 = torch.tensor([0, -1])
d2 = torch.tensor([1, -1])
weight = -1 / weight
g1 = gradient[0, h + d1[0], w + d1[1]]
g2 = gradient[0, h + d2[0], w + d2[1]]
g3 = gradient[0, h - d1[0], w - d1[1]]
g4 = gradient[0, h - d2[0], w - d2[1]]
grade_count1 = g1 * weight + g2 * (1 - weight)
grade_count2 = g3 * weight + g4 * (1 - weight)
if grade_count1 > gradient[0, h, w] or grade_count2 > gradient[0, h, w] :
nms[h - 1, w - 1] = 0
out.append(nms.unsqueeze(0))
return torch.stack(out)
class double_threshold(nn.Module):
def __init__(self):
super(double_threshold, self).__init__()
def forward(self, nms, th1, th2):
""" Double Threshold
Use two thresholds to compute the edge.
Args:
nms: the input image
threshold1: the low threshold
threshold2: the high threshold
Returns:
The binary image.
"""
visited = torch.zeros_like(nms)
output_image = nms.clone()
H, W = output_image.shape
def dfs(h, w):
if h >= H or h < 0 or w >= W or w < 0 or visited[h, w] == 1 :
return
visited[h, w] = 1
if output_image[h, w] > th1 :
output_image[h, w] = 255
dfs(h - 1, w - 1)
dfs(h - 1, w)
dfs(h - 1, w + 1)
dfs(h, w - 1)
dfs(h, w + 1)
dfs(h + 1, w - 1)
dfs(h + 1, w)
dfs(h + 1, w + 1)
else :
output_image[h, w] = 0
for h in range(H) :
for w in range(W) :
if visited[h, w] == 1 :
continue
if output_image[h, w] >= th2 :
dfs(h, w)
elif output_image[h, w] <= th1 :
output_image[h, w] = 0
visited[h, w] = 1
for h in range(H) :
for w in range(W) :
if visited[h, w] == 0 :
output_image[h, w] = 0
return output_image
class CannyFilter(nn.Module):
def __init__(self, th1, th2):
super(CannyFilter, self).__init__()
self.th1 = th1
self.th2 = th2
self.gaussian_filter = GaussianConv()
self.cal_gradient_and_direction = cal_gradient_and_direction()
self.nms = NMS()
self.double_threshold = double_threshold()
def forward(self, img):
gaussian_img = self.gaussian_filter(img)
gradients, direction = self.cal_gradient_and_direction(gaussian_img)
nms = self.nms(gradients, direction)
out = self.double_threshold(nms, self.th1, self.th2)
return out
if __name__ == "__main__":
img = '/Users/mac/Desktop/python_project/canny/test.png'
img = cv2.imread(img, 0)
img = torch.tensor(img).unsqueeze(0).unsqueeze(0).float()
# img = img.to('cuda:0')
model = CannyFilter(20, 40)
# model = model.to('cuda:0')
i = model(img)
由于运算速度慢,因此不适合在深度学习中使用这个代码
canny的pytorch实现
基于使用Pytorch从头实现Canny边缘检测并且对对其进行了简单的修改,修改后的代码如下所示
import torch
from torch import nn
import numpy as np
import cv2
def get_gaussian_kernel(k=3, mu=0, sigma=1, normalize=True):
# compute 1 dimension gaussian
gaussian_1D = np.linspace(-1, 1, k)
# compute a grid distance from center
x, y = np.meshgrid(gaussian_1D, gaussian_1D)
distance = (x ** 2 + y ** 2) ** 0.5
# compute the 2 dimension gaussian
gaussian_2D = np.exp(-(distance - mu) ** 2 / (2 * sigma ** 2))
gaussian_2D = gaussian_2D / (2 * np.pi * sigma ** 2)
# normalize part (mathematically)
if normalize:
gaussian_2D = gaussian_2D / np.sum(gaussian_2D)
return gaussian_2D
def get_sobel_kernel(k=3):
# get range
range = np.linspace(-(k // 2), k // 2, k)
# compute a grid the numerator and the axis-distances
x, y = np.meshgrid(range, range)
sobel_2D_numerator = x
sobel_2D_denominator = (x ** 2 + y ** 2)
sobel_2D_denominator[:, k // 2] = 1 # avoid division by zero
sobel_2D = sobel_2D_numerator / sobel_2D_denominator
return sobel_2D
def get_thin_kernels(start=0, end=360, step=45):
k_thin = 3 # actual size of the directional kernel
# increase for a while to avoid interpolation when rotating
k_increased = k_thin + 2
# get 0° angle directional kernel
thin_kernel_0 = np.zeros((k_increased, k_increased))
thin_kernel_0[k_increased // 2, k_increased // 2] = 1
thin_kernel_0[k_increased // 2, k_increased // 2 + 1:] = -1
# rotate the 0° angle directional kernel to get the other ones
thin_kernels = []
for angle in range(start, end, step):
(h, w) = thin_kernel_0.shape
# get the center to not rotate around the (0, 0) coord point
center = (w // 2, h // 2)
# apply rotation
rotation_matrix = cv2.getRotationMatrix2D(center, angle, 1)
kernel_angle_increased = cv2.warpAffine(thin_kernel_0, rotation_matrix, (w, h), cv2.INTER_NEAREST)
# get the k=3 kerne
kernel_angle = kernel_angle_increased[1:-1, 1:-1]
is_diag = (abs(kernel_angle) == 1) # because of the interpolation
kernel_angle = kernel_angle * is_diag # because of the interpolation
thin_kernels.append(kernel_angle)
return thin_kernels
class CannyFilter(nn.Module):
def __init__(self,
k_gaussian=3,
mu=0,
sigma=1,
k_sobel=3,
device = 'cuda:0'):
super(CannyFilter, self).__init__()
# device
self.device = device
# gaussian
gaussian_2D = get_gaussian_kernel(k_gaussian, mu, sigma)
self.gaussian_filter = nn.Conv2d(in_channels=1,
out_channels=1,
kernel_size=k_gaussian,
padding=k_gaussian // 2,
bias=False)
self.gaussian_filter.weight.data[:,:] = nn.Parameter(torch.from_numpy(gaussian_2D), requires_grad=False)
# sobel
sobel_2D = get_sobel_kernel(k_sobel)
self.sobel_filter_x = nn.Conv2d(in_channels=1,
out_channels=1,
kernel_size=k_sobel,
padding=k_sobel // 2,
bias=False)
self.sobel_filter_x.weight.data[:,:] = nn.Parameter(torch.from_numpy(sobel_2D), requires_grad=False)
self.sobel_filter_y = nn.Conv2d(in_channels=1,
out_channels=1,
kernel_size=k_sobel,
padding=k_sobel // 2,
bias=False)
self.sobel_filter_y.weight.data[:,:] = nn.Parameter(torch.from_numpy(sobel_2D.T), requires_grad=False)
# thin
thin_kernels = get_thin_kernels()
directional_kernels = np.stack(thin_kernels)
self.directional_filter = nn.Conv2d(in_channels=1,
out_channels=8,
kernel_size=thin_kernels[0].shape,
padding=thin_kernels[0].shape[-1] // 2,
bias=False)
self.directional_filter.weight.data[:, 0] = nn.Parameter(torch.from_numpy(directional_kernels), requires_grad=False)
# hysteresis
hysteresis = np.ones((3, 3)) + 0.25
self.hysteresis = nn.Conv2d(in_channels=1,
out_channels=1,
kernel_size=3,
padding=1,
bias=False)
self.hysteresis.weight.data[:,:] = nn.Parameter(torch.from_numpy(hysteresis), requires_grad=False)
def forward(self, img, low_threshold=None, high_threshold=None, hysteresis=True):
# set the setps tensors
B, C, H, W = img.shape
blurred = torch.zeros((B, C, H, W)).to(self.device)
grad_x = torch.zeros((B, 1, H, W)).to(self.device)
grad_y = torch.zeros((B, 1, H, W)).to(self.device)
grad_magnitude = torch.zeros((B, 1, H, W)).to(self.device)
grad_orientation = torch.zeros((B, 1, H, W)).to(self.device)
# gaussian
for c in range(C):
blurred[:, c:c + 1] = self.gaussian_filter(img[:, c:c + 1])
grad_x = grad_x + self.sobel_filter_x(blurred[:, c:c + 1])
grad_y = grad_y + self.sobel_filter_y(blurred[:, c:c + 1])
# thick edges
grad_x, grad_y = grad_x / C, grad_y / C
grad_magnitude = (grad_x ** 2 + grad_y ** 2) ** 0.5
grad_orientation = torch.atan2(grad_y, grad_x)
grad_orientation = grad_orientation * (180 / np.pi) + 180 # convert to degree
grad_orientation = torch.round(grad_orientation / 45) * 45 # keep a split by 45
# thin edges
directional = self.directional_filter(grad_magnitude)
# get indices of positive and negative directions
positive_idx = (grad_orientation / 45) % 8
negative_idx = ((grad_orientation / 45) + 4) % 8
thin_edges = grad_magnitude.clone()
# non maximum suppression direction by direction
for pos_i in range(4):
neg_i = pos_i + 4
# get the oriented grad for the angle
is_oriented_i = (positive_idx == pos_i) * 1
is_oriented_i = is_oriented_i + (positive_idx == neg_i) * 1
pos_directional = directional[:, pos_i]
neg_directional = directional[:, neg_i]
selected_direction = torch.stack([pos_directional, neg_directional])
# get the local maximum pixels for the angle
# selected_direction.min(dim=0)返回一个列表[0]中包含两者中的小的,[1]包含了小值的索引
is_max = selected_direction.min(dim=0)[0] > 0.0
is_max = torch.unsqueeze(is_max, dim=1)
# apply non maximum suppression
to_remove = (is_max == 0) * 1 * (is_oriented_i) > 0
thin_edges[to_remove] = 0.0
# thresholds
if low_threshold is not None:
low = thin_edges > low_threshold
if high_threshold is not None:
high = thin_edges > high_threshold
# get black/gray/white only
thin_edges = low * 0.5 + high * 0.5
if hysteresis:
# get weaks and check if they are high or not
weak = (thin_edges == 0.5) * 1
weak_is_high = (self.hysteresis(thin_edges) > 1) * weak
thin_edges = high * 1 + weak_is_high * 1
else:
thin_edges = low * 1
return thin_edges * 255
if __name__ == "__main__":
img = '/root/test.png'
img = cv2.imread(img, 0)
img = torch.tensor(img).unsqueeze(0).unsqueeze(0).float()
img = img.to('cuda:0')
model = CannyFilter()
model = model.to('cuda:0')
img_ = model(img, 20, 40)
cv2.imwrite('/root/origin.jpg', img.cpu().numpy()[0][0])
cv2.imwrite('/root/canny.jpg', img_.cpu().numpy()[0][0])
得到的结果如下所示:
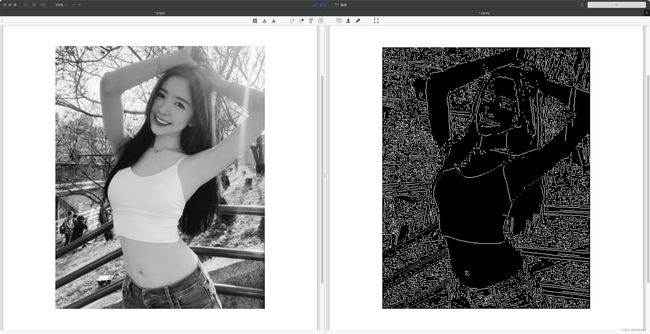
在实现过程中,对于梯度位于low_threshold和high_threshold内的点的处理过程不同,导致处理结果也不同