如何将彩色图像进行三通道的Canny边缘检测
如何将彩色图像进行三通道的Canny边缘检测
本文主要记录如何将彩色图像进行三通道的Canny边缘检测。
目录
- 如何将彩色图像进行三通道的Canny边缘检测
- 0.主要步骤
- 1.彩色图像分离成3通道的图像
- 2.灰度图像实现Canny边缘检测
- 3.展示边缘检测结果
0.主要步骤
将彩色图像进行三通道的Canny边缘检测,主要包括以下2个步骤:
(1)将彩色图像分别分离为3个通道的图像;
(2)将3个通道的图像分别进行Canny边缘检测;
(3)展示边缘检测结果。
1.彩色图像分离成3通道的图像
将彩色图像Airplane分离成3个通道的图像,分别为Airplane_B.jpg,Airplane_G.jpg,Airplane_R.jpg。具体代码为:
# coding :UTF-8
# 文件功能: 代码实现彩色图像三通道分别提取的功能
# 开发人员: XXX
# 开发时间: 2022/6/11 6:20 下午
# 文件名称: Three_Channel_Extraction_of_Color_Images.py
# 开发工具: PyCharm
# 当采用CV2时,读取到的彩色图像的三通道顺序为:BGR
# 本程序是实现将一个彩色图像分离出3个通道的图像,然后分别保存为3张图像,并用Orinal_Canny_Edge_Detection.py实现边缘检测。
import cv2
import numpy as np
img = cv2.imread('image/Airplane.tiff') # 读取图像
# 显示彩色图像
cv2.imshow("img", img)
cv2.waitKey(0)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 显示灰度图像
cv2.imshow("gray", gray)
cv2.waitKey(0)
# 得到图像的大小
rows, cols, _ = img.shape
print(rows, cols)
# 初始化一个大小一样的图像,元素均初始化为0
created = np.zeros((rows, cols))
# for in 语句,遍历数组,但不能修改数组
for i in img:
for j in i:
#print(j)
pass
# 给数组赋值
for i in range(0, rows):
for j in range(0, cols):
created[i, j] = img[i, j, 2] # 第3个参数,可以是0,1,2,分别表示B,G,R三个通道
print(created.shape) # 输出创建图像的大小
# 必须加上下面这一条语句,否则无法正确显示图像
created = created.astype(np.uint8) # 转换数据类型,才能正确的显示图像
cv2.imshow('created', created)
cv2.imwrite('image/Airplane_R.jpg', created)
cv2.waitKey(0)
2.灰度图像实现Canny边缘检测
分别将3个通道的图像进行Canny边缘检测。具体代码如下:
# coding :UTF-8
# 文件功能: 代码实现最简单的Canny edge detection边缘检测的功能
# 开发人员: XXX
# 开发时间: 2022/6/11 5:18 下午
# 文件名称: Orinal_Canny_Edge_Detection.py
# 开发工具: PyCharm
import cv2
import numpy as np
from PIL import Image
lower = 30 # 最小阈值
upper = 70 # 最大阈值
img_path = 'image/Airplane_R.jpg' # 指定测试图像路径
gray = cv2.imread(img_path, 0) # 读取灰度图像
edge = cv2.Canny(gray, lower, upper) # Canny 图像边缘检测
contrast = np.concatenate([edge, gray], 1) # 图像拼接
Image.fromarray(contrast).save('image/Airplane_R_edge.png', format='PNG') # 保存图像
3.展示边缘检测结果
(1)原始彩色图像

(2)分离的3通道的图像
1、Airplane_B.jpg

2、Airplane_G.jpg
3、Airplane_R.jpg

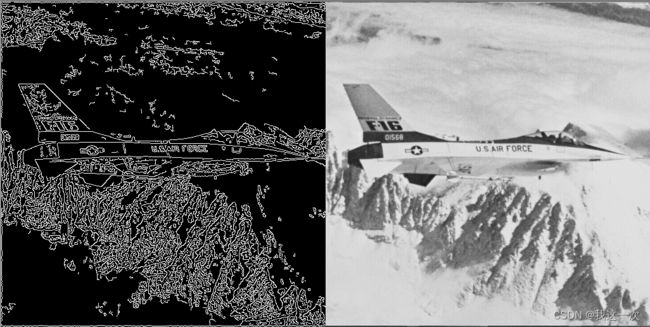
(3)3通道边缘检测的结果
1、Airplane_B_edge.jpg

2、Airplane_G_edge.jpg

3、Airplane_R_edge.jpg