TSDF文件mhd,raw格式转点云的可视化,python实现
最近获得了一个TSDF表示的三维模型,文件格式是mhd和raw文件,我看很多医学图像也是用的这个格式,但是网上却找不到可视化的方法,于是在研究了TSDF的原理之后,自己用Python进行了TSDF到点云的简单转换,有一定的误差,但是效果还是可以的。
TSDF原理:
TSDF其实与体素表示提相近的,但是又有一定的差别。TSDF是固定了一个三维空间,如图1所示,这个三维空间有点类似于体素,空间设定了固定的长宽高,有一个固定的体积,和体素空间非常相似,但是与体素不同的是,这个空间里面每一个体素位置都会有一个值,这个值是每一个体素点到这个空间里面的对象的表面的距离,而且TSDF只进行这个三维空间的场景建模,如果建模过程中建模的范围超出了这个三维空间,那么超出的部分是不会记录到模型中的。如图2所示,是一个人脸的切面,也就是TSDF的其中一层的演示。因为只涉及到到表面的距离,在表面前面的值是正的,如果到表面后面了这个值就是负的,默认值是零,如果值的绝对值大于1,则用正负整数1来表示,从图2中可以看出来。
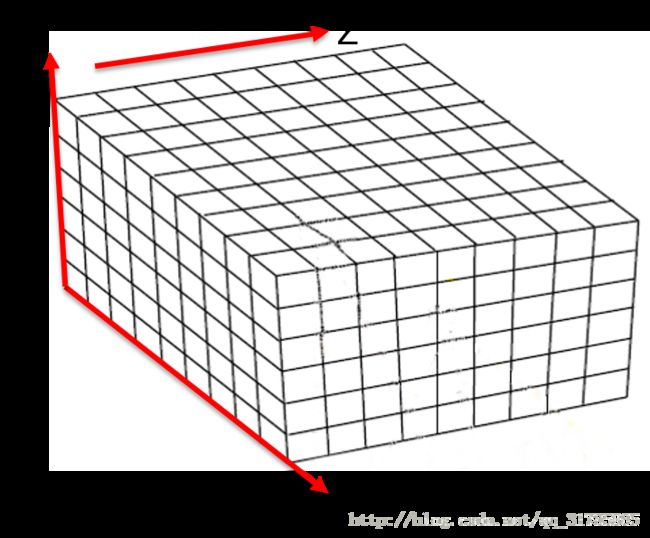
图1 TSDF的三维空间
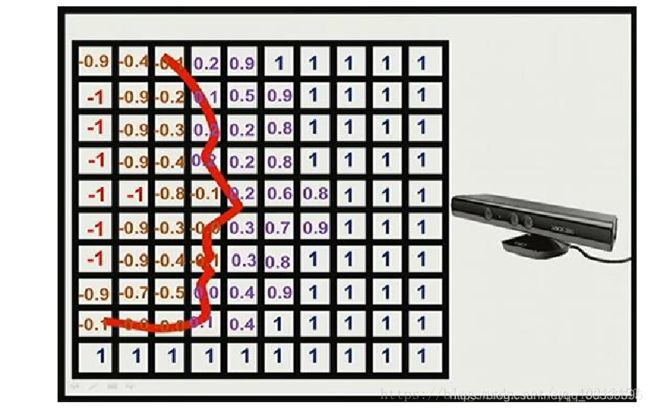
图2 TSDF的一个切片的演示
那么如果要可视化TSDF,通常是使用光线射影raycasting,就是从你想要查看的视角射出光线,如果穿过了表面,那么就记录,如果没有就不记录值。
但是我目前还没有找到很好用的,于是我打算把TSDF转换成点云文件,然后进行查看。
我的做法是记录每一个边缘位置的体素的位置为点云坐标,比如图2里面展示的,从正值到负值的转换边界记录成点云坐标,这与实际的场景模型的坐标值是不对应的,所以目前只适合进行可视化,如果要得到正确的点云值还需要进行转换,我之后会考虑实现,目前先记录我把TSDF转换成可视化点云的过程。
我操作的是7scenes数据集里面提供的TSDF模型:https://www.microsoft.com/en-us/research/project/rgb-d-dataset-7-scenes/
使用的是chess场景的raw文件。
我首先通过二进制方式读取了raw文件,并将二进制按照有符号short型进行转换,然后转变为numpy数组,并转为了512x512x512的数组。
接下来我对这些数组进行遍历,记录每一个维度中发生了符号变化的所有点边界,并存储到点云文件中。
最后读取点云文件,使用open3开源3D库进行可视化。
使用需安装:
pip install open3d
pip install numpy下面是代码:
import numpy as np
import struct
TSDFfilename='chess.raw' # TSDF 二进制文件路径
PointCloudfilename="chessPointCloud.xyz" # 输出点云文件
h,w,d=512,512,512 # TSDF 的高度 宽度和深度
# 加载测试数据
f = open(TSDFfilename,'rb')
# 文档中包含的数字个数,而一个short数占2个字节
data_raw = struct.unpack('h'*(h*w*d),f.read(2*h*w*d)) # h: short H: usight short
f.close()
verify_data = np.asarray(data_raw).reshape(h,w,d)
pointCloud = []
f_pc = open(PointCloudfilename, "w")
# 转换为点云的遍历过程
for i in range(h):
for j in range(w):
for k in range(1,d):
if (verify_data[i][j][k]>0 and verify_data[i][j][k-1]<0):
# print(i,j,k)
pointCloud.append([i,j,k])
f_pc.write(str(i)+" "+str(j)+" "+str(k)+" \n")
for i in range(h):
for k in range(d):
for j in range(1,w):
if (verify_data[i][j][k]>0 and verify_data[i][j-1][k]<0):
# print(i,j,k)
if [i,j,k] in pointCloud: # 避免记录同样的点
pass
else:
f_pc.write(str(i)+" "+str(j)+" "+str(k)+" \n")
for k in range(d):
for j in range(w):
for i in range(1,h):
if (verify_data[i][j][k]>0 and verify_data[i-1][j][k]<0):
# print(i,j,k)
if [i,j,k] in pointCloud: # 避免记录同样的点
pass
else:
f_pc.write(str(i)+" "+str(j)+" "+str(k)+" \n")
f_pc.close()
#下面部分的代码可以单独拿出去用作可视化,改一下文件名那里的参数就可以了
import open3d as o3d
print("Load a ply point cloud, print it, and render it")
pcd = o3d.io.read_point_cloud(PointCloudfilename)#可以替换成需要查看的点云文件
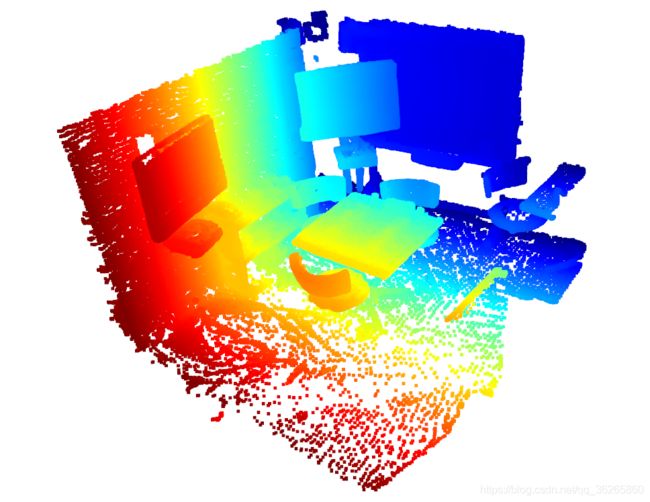
o3d.visualization.draw_geometries([pcd])这是生成的点云的可视化效果(代码运行的时间挺长的):