ROS学习第七天 机器人系统设计(一)——(仿真&导航)
学过RO的都知道ROS中的机器人系统仿真与导航是最重要、最核心的功能,无论是实际运行还是虚拟仿真,都是学习ROS的精华所在。
本节将不会过多的介绍机器人的仿真内容,主要是因为建立一个机器人模型过于浪费时间,就像是32不会让你来仿真一样,本意是不想说仿真的,但是考虑到后面机器人的导航还是要用到机器人模型的,这一节会稍微提一下基础性的概念。
6.1机器人仿真概述
虽然机器人仿真给没有设备的提供一个机会,但是构建仿真环境会浪费过多的时间,所以这里并不推荐自己构建仿真环境。
所以这里只会简单的介绍关于仿真一些流程,工作组件的名字
谈到仿真,一定要学习ROS中的三个内容:
对机器人建模(URDF)
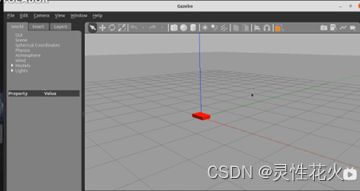
创建仿真环境(Gazebo)
感知环境(Rviz)
其中URDF不能单独使用,需要结合后者中的任意一个
这里只简单地介绍一下URDF结合Rviz的仿真。
URDF结合Gazebo,就不细说了,主要是知道有这么个功能就行
6.1.1 URDF
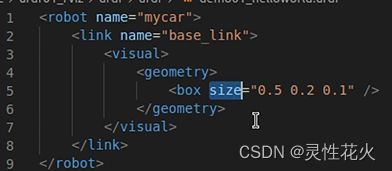
URDF简单来说是一种描述性文件,用它的语言来诠释一个红色的立方体
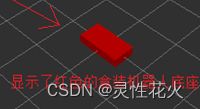
Rviz下的URDF表示的立方体以及对应URDF文件叙述
现在来创建一个URDF文件
- 1 创建一个功能包,并导入依赖包:urdf与xacro
urdf与xacro就像我们使用的roscpp那样是构建URDF所需要的编程语言
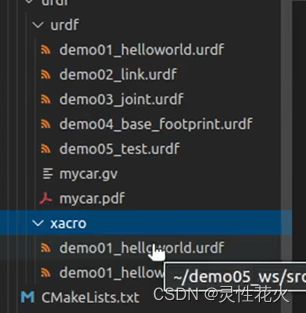
- 2 创建如下文件夹,建立框架
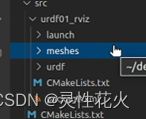
Launch文件用启动该节点
meshes是用来贴图
urdf用来描述模型
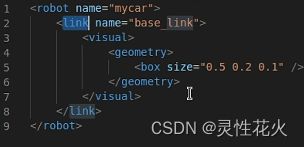
- 3 开始编程
新建urdf文件后缀.urdf
也可以用xacro,后缀是.urdf.xacro
这里直接复制老师文档中的了,就不详细解释了
但是在运行的时候就和下面用launch文件传参不一样,由于xacro最后两行已经配置了相应语法,只需要传入到xacro中就能转换为urdf文件
![]()
然后保存输出
![]()
在相应文件夹下就能生成对应urdf文件
xacro就到此结束,不再细说
- 4 编写launch文件
主要来将URDF上面的编程文件载入参数服务器中,并调用rviz

之后运行launch文件就能够直接打开rviz,在add中国选择机器人模型就能够打开该文件在rviz就能实现(需要修改地图坐标系)
- 5 优化机器人
…不进行介绍
6.1.2Rviz
ROS小车在实际操作的时候会调用地盘驱动硬件,在仿真中无法获取动态数据.ROS就提供了一种仿真的方式在Rviz中实现运动,Arbotix就是对应的接口,ROS提供相应的功能包来调用这个接口,这样控制机器人的命令就能够通过这个接口实现控制小车运动
这里还是简单介绍一下相应的设备
1 安装 Arbotix
方式1:命令行安装
sudo apt-get install ros-<>-arbotix 将 <
如果提示功能包无法定位,使用方式2。
方式2:源码安装
先从 github 下载源码,然后调用 catkin_make 编译
git clone https://github.com/vanadiumlabs/arbotix_ros.git
2 创建新功能包,准备机器人 urdf、xacro
urdf 和 xacro 调用上一讲实现即可
3 添加 arbotix 所需的配置文件
添加 arbotix 所需配置文件
controllers: {
# 单控制器设置
base_controller: {
#类型: 差速控制器
type: diff_controller,
#参考坐标
base_frame_id: base_footprint,
#两个轮子之间的间距
base_width: 0.2,
#控制频率
ticks_meter: 2000,
#PID控制参数,使机器人车轮快速达到预期速度
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
#加速限制
accel_limit: 1.0
}
}
其他配置想参考
http://wiki.ros.org/arbotix_python/diff_controller
launch 文件中配置 arbotix 节点
launch 示例代码
代码解释:
在仿真环境下,需要配置 sim 为 true
4 启动 launch 文件并控制机器人模型运动
启动launch:roslaunch xxxx ....launch 然后配置 rviz即可
控制小车运动:
调用 rostopic list 会发现一个熟悉的话题: /cmd_vel 也就说我们可以发布 cmd_vel 话题消息控制小陈运动了,该实现策略有多种,可以另行编写节点,或者更简单些可以直接通过如下命令发布消息:
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'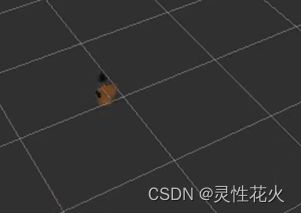
还可以直接在rviz中设置话题名称,这样就能够直接看到机器人运行的方向
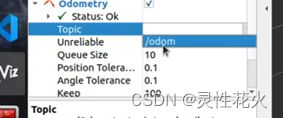
修改keep就能够少量查看
总而言之在add中能添加各种组件
6.1.3 Gazebo
因为用仿真环境,需要使用ros_control,和Arbotix接口功能是一样的,配置就不细究,这里直接跳过
6.1.4三者结合使用
上面说了URDF 用于创建机器人模型、Rviz 可以显示机器人感知到的环境信息,Gazebo 用于仿真,可以模拟外界环境,以及机器人的一些传感器
本节就是建立虚拟的环境,主要目的是使用传感器
简单来说Gazebo创建虚假的三维环境

URDF创建小车
使得小车能够在Gazebo中运行
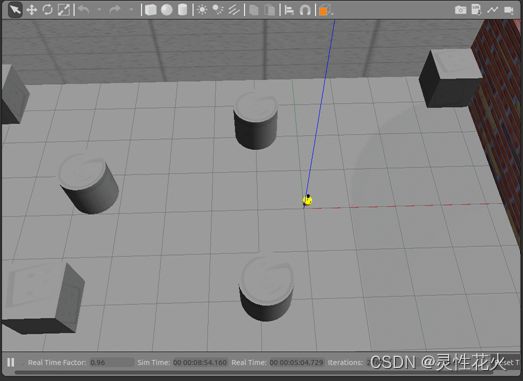
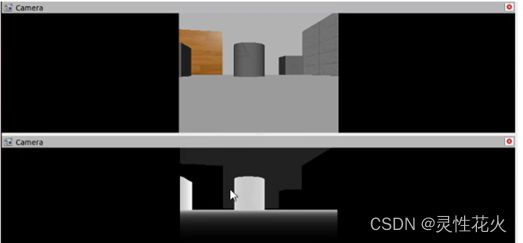
在rviz中能够使用各种该传感器来读取运动参数
深度相机相机采集相片和深度信息
因为只是大致提一嘴仿真 ,很多东西都没细说,没细究,只是大概介绍一些工作组件的功能和原理
如果真的要使用仿真需要参考官网,还有老师的视频
Gazebo : Tutorial : Gazebo plugins in ROS
231仿真之URDF集成rviz_基本流程-机器人系统仿真_哔哩哔哩_bilibili