机器学习 | 数学基础(一)
【方向导数与梯度】
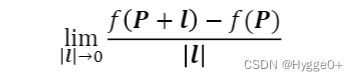
方向导数是函数定义域内某点P在特定方向l上的导数。
梯度是指方向导数取值最大的方向。梯度是一个矢量。梯度指向函数值增加最快的方向。

【一点的梯度方向应该如何确定?】
- 通过导数正负确定梯度方向
【梯度与导数的关系】
梯度是指方向导数取值最大的方向(方向导数为正),则根据方向导数的公式可知梯度指向函数值增大最快的方向。而根据一点邻域内导数的正负可以确定函数值增大还是减小。
【例如】
在一元函数f(x)上,一点的方向导数即为该点在x轴方向上的导数。某点右邻域内导数为负,则表示随自变量增大,函数值减小,即右方向为函数值减小的方向,也就是说这一点的梯度方向指向x轴负方向。
【结论】
可以通过判断某点右邻域内的(偏)导数正负确定该点处的梯度方向。
- 通过等高线确定梯度方向
梯度方向与等高线切线方向垂直。且指向函数值增大的方向。
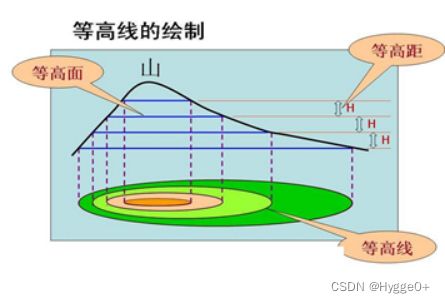
【等高线】
假设我们的损失函数为z=f(x,y),在几何上表示是一个曲面,该曲面被平面c(c为常数)所截得的曲线l方程为:
Z=f(x,y)
Z=c
这条曲线l在xoy轴面上的投影是一条平面曲线Q,它在xoy平面直角坐标系中的方程为f(x,y)=c,则我们称平面曲线Q为函数z=f(x,y)的等高线。
【函数等高线与梯度方向】
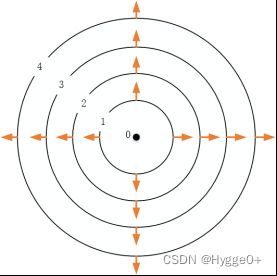
- 凸函数Z = X 2 + Y 2,其梯度为( 2 x , 2 y )。将函数的等高线画出,由内圈到外圈函数值依次增大,梯度指向函数值增加最快的方向(由内指向外侧),故而函数的梯度在x O y 平面内的图像如下:
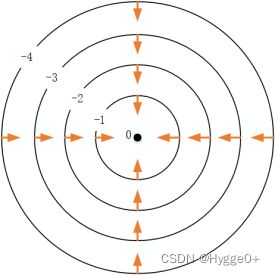
- 函数Z= − ( X 2 + Y 2 ),其梯度为( − 2 x , − 2 y )。同样将函数的等高线画出,由内圈到外圈函数值依次减小,梯度指向函数值增加最快的方向(由外指向内侧),故而函数的梯度在x O y平面内的图像如下:
【结论】
形如碗状函数(凸函数,Z=X2+Y2),其梯度方向总是由内侧指向外侧(指向函数值增大的方向)。
形如倒扣碗状函数Z= − ( X 2 + Y2 ),其梯度方向总是由外侧指向内侧(指向函数值增大的方向)。
【凸优化】
【凸函数】任意两点间的函数值小于两点相连线段值
【为什么要特别关注凸函数的优化问题?】
凸函数的特性:凸优化问题中,局部最优解同时也会是全局最优解,使优化问题相对更容易解决。
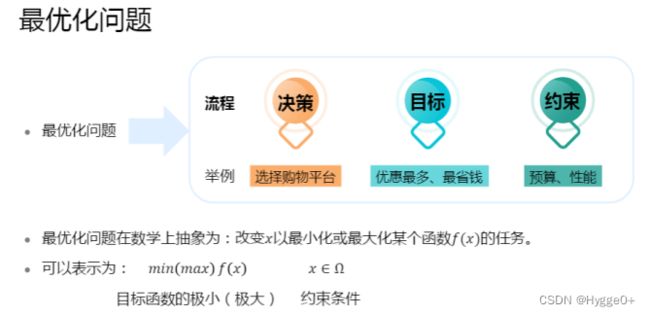
【最优化问题】
机器学习中的大多数问题都可以归结为最优化问题。最优化问题是求解函数极值的问题,包括极大值和极小值。在机器学习之类的实际应用中,我们一般将最优化问题统一表述为求解函数的极小值问题,即:

【补充说明】
举例:双十一优惠期间买台电脑
决策:在哪个店铺买
目标:实现最高优惠
约束:预算、以及购买电脑的性能
【补充说明】
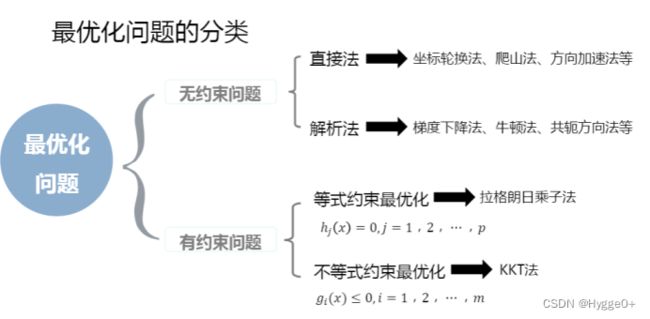
直接法使用条件:目标函数比较复杂或写不出具体表达式时,通过数值计算,经过一定迭代过程产生点列,在其中搜索最优点。
解析法(间接法):根据无约束问题的目标函数表达式给出一种求解最优解的方法。
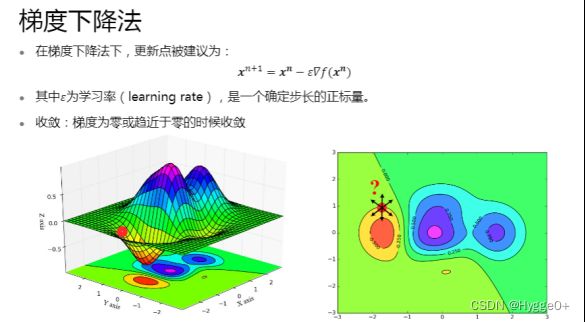
【为什么叫梯度下降算法?】
梯度方向是函数值增加最快的方向,所以梯度的负方向就是函数减小最快的方向。
一般情况下,我们训练模型是为了找到使目标函数(如损失函数)取得最小值时的参数。所以希望从某个初始值开始,函数值在参数的不断更新中逐渐减小,所以更新参数时总是沿着梯度方向的负方向前进,直至到最低点(即损失函数最小值)。
【梯度下降法公式推导】
根据泰勒公式![]() 可以得到如果x的变化很小,并且变化值与导数值反号,则函数值下降。
可以得到如果x的变化很小,并且变化值与导数值反号,则函数值下降。
多元函数f(x)在x处的泰勒展开公式为:(忽略二次及更高项)
![]()
【注:其中![]() 是指梯度向量与自变量增量的内积,,等价于一元函数中的
是指梯度向量与自变量增量的内积,,等价于一元函数中的![]() 】
】
当Δx足够小时,在x邻域内可忽略二次及更高项,有![]()
[该式呈现出函数增量、梯度与自变量增量之间的关系]
[注:对于一元函数来说,x的变化方向只有左和右;但对于多元函数来说,Δx是一个向量,其有无穷多个方向。那么如何确定函数递减(下山)的方向呢?]
【确定函数值下降时Δx的方向】
根据此式可知,若能保证![]() ,则可保证f(X)函数值递减,即往下坡这个正确方向走。
,则可保证f(X)函数值递减,即往下坡这个正确方向走。
根据向量内积公式![]() 可知,上式等价于cosθ≤0 ,即选择合适的增量Δx,就能保证函数值下降,要达到这一目的,只要保证梯度和Δx的夹角的余弦值小于等于0就可以了。那么如何可以使函数值下降的最快呢?
可知,上式等价于cosθ≤0 ,即选择合适的增量Δx,就能保证函数值下降,要达到这一目的,只要保证梯度和Δx的夹角的余弦值小于等于0就可以了。那么如何可以使函数值下降的最快呢?
【确定函数值下降最快时Δx的方向】
因为梯度方向是函数值增加最快的方向,所以在梯度相反的方向函数值下降的最快。当cosθ=-1(极小值)时,梯度与Δx反向,此时函数值下降最快。
此时,利用共线向量相关知识可将Δx表示为![]() 。【其中α为一个接近于0的正数,称为步长,由人工设定,用于保证x+Δx在x的邻域内,从而可以忽略泰勒展开中二次及更高的项】
。【其中α为一个接近于0的正数,称为步长,由人工设定,用于保证x+Δx在x的邻域内,从而可以忽略泰勒展开中二次及更高的项】
此时函数变化量为![]() 。由该式可以得到,只要梯度不为0,往梯度的反方向走函数值一定是下降的。
。由该式可以得到,只要梯度不为0,往梯度的反方向走函数值一定是下降的。
迭代更新x值时,x=x-Δx,根据上面用梯度表示出的![]() ,可以得到迭代公式:
,可以得到迭代公式:
![]()
即从初始点X0开始,使用该迭代公式不断更新X值,只要没有到达梯度为0的点,则函数值会沿着序列Xk递减,最终会收敛到梯度为0的点,这就是梯度下降法。迭代终止的条件是函数的梯度值为0(实际实现时是接近于0),此时认为已经达到极值点。
附参考链接:梯度下降算法原理讲解_征途黯然.的博客-CSDN博客_梯度下降数学原理

【补充说明】
如果想要找到最短的路径到达最底部。梯度下降法每次只从当前位置选择一个坡度最大的方向往下走;而牛顿法在选择方向时不仅会考虑坡度是否足够大,而且还会考虑走了一步后坡度是否会变小。因此牛顿法往往会少走很多弯路,收敛速度会比梯度下降法更快。
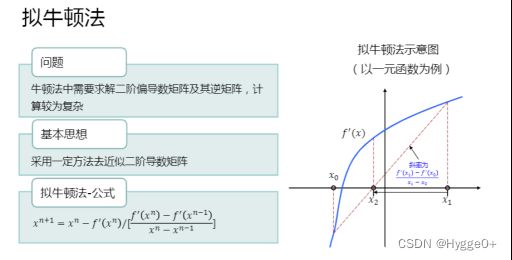
【补充说明】
牛顿法尽管收敛速度比较快,但每次更新迭代时都要计算二阶导数矩阵以及其逆矩阵,造成计算量偏大,且逆矩阵可能不可逆。故而提出拟牛顿法。将一阶导数两点连线的斜率来近似二阶导数。保证收敛速度的同时减少计算量。
【补充说明】
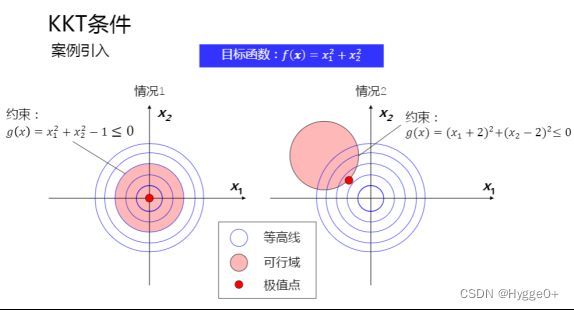
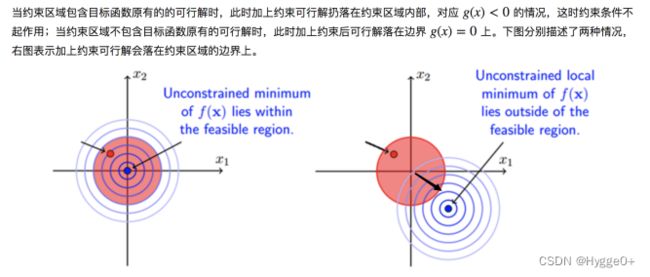
f(x)的取值区域为目标域(蓝色等高线),符合g(x)<=0的区域为约束域(红色区域)。
左图为约束无效;右图为约束有效
KKT法(不等式约束),是拉格朗日(等式约束)的扩展。约束有效时,将不等式约束条件转换为等式约束条件。

【约束是否有效】
【假设一条狗被绳子拴住,f(X)代表狗与食物之间的最短距离,约束域g(X)<=0为狗被绳子拴住的圆形区域】
若f(X)本身的最小取值可行解包含在约束域内,即取到f(x)的局部最小值时若g(x)<0,则表示约束无效。【此情况为:狗本身就在食物区域内,不论是否被绳子拴住其都可以获得食物,即狗与食物之间的最短距离为0(此为目标域局部最小值),这表示狗并未被绳子真正约束】;
若f(X)最后的取值落在g(X)的边界,即g(x)=0,f(X)取到局部极小值,则表示约束有效。【此情况为:狗本身并不在食物区域内,被绳子拴住的狗只能尽可能缩短其与食物之间的距离,则表示狗被绳子约束。若未被约束的话,就可以到达食物区域,与其最短距离为0。在约束下狗尽力到达目标域某点,此点是f(x)尽可能小的位置,称为f(x)在这个约束下取到的最小值点,是另一种意义上的极小值点。】
正是因为这两种情况同时存在,所以才有了KKT条件。
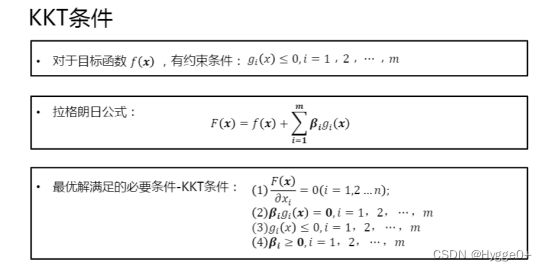
【KKT条件】
附:参考博客链接
SVM(二):KKT条件最直白的解释_CtrlZ1的博客-CSDN博客_svm的kkt条件