matlab单级齿轮减速器设计
如图所示,某带式输送机采用三相异步电动机驱动,采用用带传动和一级圆柱齿轮减速器实现减速传动,载荷平稳,转向不变。已知高速齿轮轴的输入功率[2kw-5kw],小齿轮转速[320-500]r/min,齿轮传动比=4。选择直齿轮/斜齿轮,进行一级齿轮传动的设计计算。

要求:本题为设计计算题,可查询相关手册标准进行计算。直齿轮。采用matlab编程辅助设计
初步选取4KW,500r/min按照软齿面闭式齿轮
设计部分:
%齿轮弯曲疲劳强度计算
T=76.4;%(N*m)转矩
n1=500;%(r/min)小齿轮转速
mn=2;%(mm)法向模数
z1=32;%小齿轮齿数
z2=126;%大齿轮齿数
bb=0;%(度)螺旋角;直齿轮设为0
an=20;%(度)法面压力角,直齿即是压力角
b1=63;%(mm)小齿轮齿宽
b2=68;%(mm)大齿轮齿宽
aa=158;%实际中心距
ha=1;%齿顶高系数
x1=0;%小齿轮变位系数
x2=0;%大齿轮变位系数
%斜齿轮/直齿轮选择
if bb>=1
bbb=bb*3.14/180;%(rad)螺旋角弧度表示
else
bbb=0;%(rad)螺旋角弧度表示
end
d1=(mn/cos(bbb))*z1;%(mm)小齿轮分度圆直径
d2=(mn/cos(bbb))*z2;%(mm)大齿轮分度圆直径
Ft=2*T/d1;%(N)圆周力
kA=1;%使用系数
v=d1*n1*3.14/(60*1000);%(m/s)节圆线速度
kv=1.1;%动载系数
kb=1.1;%齿向载荷分配系数
ka=1.35;%齿间载荷分配系数
k=kA*kv*ka*kb;%载荷系数
Yfa1=2.55;%齿形系数
Ysa1=1.65;%应力校正系数
Yfa2=2.2;%齿形系数
Ysa2=1.85;%应力校正系数
if bb>=1
eb=b*sin(bbb)/(3.14*mn);%斜齿轮纵向重合度,直齿不用管
Yb=0.92;%螺旋角影响系数,直齿轮不用改
else
Yb=0.6755;
end
%斜齿轮端面向重合度
if bb>=1
ann=an*3.14/180;%(rad)法面压力角
at=atan(tan(ann)/cos(bbb));%(rad)端面压力角
att=acos((d1+d2)*cos(at)/(2*aa));%(rad)实际端面压力角
rb1=d1*cos(at)/2;%小齿轮基圆半径
rb2=d2*cos(at)/2;%大齿轮基圆半径
yt=(z1+z2)/2*((cos(at)/cos(att))-1);%中心距变动系数
ytt=x1+x2-yt;%齿高变动系数
ra1=d1/2+(ha+x1-ytt)*mn/cos(bbb);%小齿顶圆半径
ra2=d2/2+(ha+x2-ytt)*mn/cos(bbb);%大齿顶圆半径
aa1=acos(rb1/ra1);%重合度中参数
aa2=acos(rb2/ra2);%重合度中参数
ea1=z1*(tan(aa1)-tan(att));%重合度中参数
ea2=z2*(tan(aa2)-tan(att));%重合度中参数
ea3=ea1+ea2;%重合度中参数
ea=ea3/(2*3.14);%重合度
else
ea=1.84;%重合度
end
ZE=189.8;%(MPa开根号)弹性影响系数
ZH=2.5;%区域系数
u=z1/z2;%小齿轮/大齿轮的传动比
%选择结构,给定内/外啮合判定公式
i=1;%外啮合判定条件,否则为0
if i>=1
uu=(u+1)/u;%外啮合
else
uu=(u-1)/u;%内啮合
end
%选择结构,给定内/外啮合判定公式
sF1=2000*(k*T*Yfa1*Ysa1*Yb)/(b1*mn*d1);%(MPa)小齿轮弯曲疲劳强度
sF2=2000*(k*T*Yfa2*Ysa2*Yb)/(b2*mn*d1);%(MPa)大齿轮弯曲疲劳强度
disp(sF1)
disp(sF2)
结果展示:

展示部分:
function GearMotion()
clc
clearvars
close all
dbstop error
%%Data
numrevolution=5;%number of revolution fo the first gear
numframe=360;%fram for revolution
%% Gear1小齿轮
Gear1.m=2;%模数
Gear1.z=32;%齿数
Gear1.Alpha=20;%压力角
Gear1.Addendum=1;%齿顶高系数
Gear1.Dedendum=1.25;%齿跟高系数
Gear1.FaceWidth=10;%齿面宽
Gear1.ShaftDiameter=10;%轴直径 [mm]
Gear1.numpoint=10;
Gear1.t=[];
Gear1.p=[];
Gear1=GearDesign(Gear1,false);
%% Gear2大齿轮
Gear2.m=2;%模数
Gear2.z=126;%齿数
Gear2.Alpha=20;%压力角
Gear2.Addendum=1;%齿顶高系数
Gear2.Dedendum=1.25;%齿跟高系数
Gear2.FaceWidth=10;%齿面宽
Gear2.ShaftDiameter=10;%轴直径 [mm]
Gear2.numpoint=10;
Gear2.t=[];
Gear2.p=[];
Gear2=GearDesign(Gear2,false);
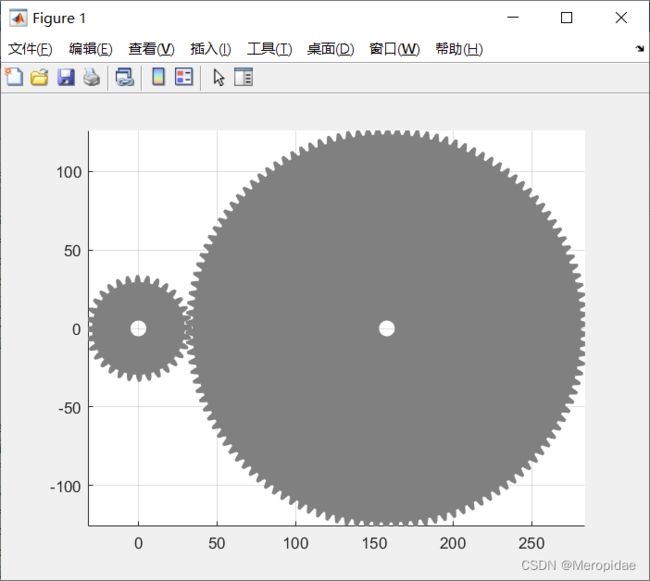
%% PLot Gears绘图设置
r1=Gear1.m*Gear1.z/2;
r2=Gear2.m*Gear2.z/2;
I=r1+r2;
Gear2.p(:,1)=Gear2.p(:,1)+I;
if (mod(Gear2.z,2))<1
dpitch=pi/Gear1.z;
[Gear1.p(:,1),Gear1.p(:,2)]=Rotate(Gear1,0,dpitch);
end
step=2*pi/numframe;
GearRatio=Gear2.z/Gear1.z;
Gear1plot=Gear1;
Gear2plot=Gear2;
currentstep=0;
for i=1:numrevolution*numframe
[Gear1plot.p(:,1),Gear1plot.p(:,2)]=Rotate(Gear1,0,currentstep);
[Gear2plot.p(:,1),Gear2plot.p(:,2)]=Rotate(Gear2,I,-currentstep/GearRatio);
currentstep=currentstep+step;
figure(1)
hold off
trisurf(Gear1plot.t,Gear1plot.p(:,1),Gear1plot.p(:,2),Gear1plot.p(:,3),'facecolor',[.5 .5 .5],'edgecolor','none')
hold on
axis equal
view(2)
axis([-r1, I+r2, -max([r1,r2]),max([r1,r2]),0 ,10])
trisurf(Gear2plot.t,Gear2plot.p(:,1),Gear2plot.p(:,2),Gear2plot.p(:,3),'facecolor',[.5 .5 .5],'edgecolor','none')
end
end
function [xnew,ynew]=Rotate(Gear,trasl,angle)
x=Gear.p(:,1)-trasl;%移到原点
y=Gear.p(:,2);
xnew=x*cos(angle)+y*sin(angle)+trasl;%控制旋转
ynew=-x*sin(angle)+y*cos(angle);
end
结果展示:
思路就是由齿面接触疲劳强度条件设计,由齿轮弯曲疲劳强度条件校核
注释都写在代码里面了,很详细哦
求求三连啦