(02)Cartographer源码无死角解析-(30) LocalTrajectoryBuilder2D::AddRangeData()→激光雷达运动畸变较正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:
(02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885
文 末 正 下 方 中 心 提 供 了 本 人 联 系 方 式 , 点 击 本 人 照 片 即 可 显 示 W X → 官 方 认 证 {\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证} 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
在上一篇博客中,对 LocalTrajectoryBuilder2D::AddRangeData() 函数中的如下部分进行了讲解:
// Step: 1 进行多个雷达点云数据的时间同步, 点云的坐标是相对于tracking_frame的
auto synchronized_data =
range_data_collator_.AddRangeData(sensor_id, unsynchronized_data);
if (synchronized_data.ranges.empty()) { //判断同步的点云数据是否为空,
//通常在多雷达传感器中,expected_sensor_ids_ 数据没有到齐。
LOG(INFO) << "Range data collator filling buffer.";
return nullptr;//表示数据已经添加到数据整理器的缓存中。
}
之前或许看过之后不是很明白,但是现在应该是比较清楚了,其是把多个雷达数据的点云,按时间戳排序整合到一起,且都是基于 tracking_frame 坐标系的。其返回的数据结构如下所示:
// 时间同步前的点云
struct TimedPointCloudData {
common::Time time; // 点云最后一个点的时间
Eigen::Vector3f origin; // 雷达传感器到 tracking_frame_ 的平移
TimedPointCloud ranges; // 数据点的集合, 每个数据点包含xyz与time, time是负的
// 'intensities' has to be same size as 'ranges', or empty.
std::vector<float> intensities; // 空的
};
// 时间同步后的点云
struct TimedPointCloudOriginData {
struct RangeMeasurement {
TimedRangefinderPoint point_time; // 带时间戳的单个数据点的坐标 xyz
float intensity; // 强度值
size_t origin_index; // // 该点用了“origins”中哪个原点,对单一、有序场景,既然origins.size()总是1,那它只能是0。
};
common::Time time; // 点云的时间
// ranges中点云涉及哪些坐标系,origins存储着这些坐标系原点在tracking_frame_坐标系下的坐标。
// 针对单一、有序场景,传感器只涉及一个坐标系,像“laser”,所以origins.size()总是1,值是TimedPointCloudData.origin。
std::vector<Eigen::Vector3f> origins;
std::vector<RangeMeasurement> ranges; // 雷达原点在机器人坐标系下的位置
};
为了方便讲解,我们就认为上面的包含的就是一帧数据,只是有包含多个雷达数据而已。后续称为多雷达时间同步数据、时间同步雷达数据、时间同步点云数据都差不多表达一个意思。注意时间同步之后的雷达数据,也就是上面结构体中 TimedPointCloudOriginData:: time 变量表示的是 current_start_,也就是时间同步点云最后一个数据的时间戳,TimedPointCloudOriginData::RangeMeasurement::point_time 表示相对于 TimedPointCloudOriginData:: time 的时间,一般来说该为0或者负数。
TimedPointCloudOriginData::origins 存储了所有雷达传感器原点相对于 tracking_frame_ 坐标系的平移,通过 TimedPointCloudOriginData ::ranges::origin_index 进行索引即可获取
二、AddRangeData() 续接
回到 LocalTrajectoryBuilder2D::AddRangeData 函数,继续往下分析。
const common::Time& time = synchronized_data.time;
// Initialize extrapolator now if we do not ever use an IMU.
// 如果不用imu, 就在雷达这初始化位姿推测器
if (!options_.use_imu_data()) {
InitializeExtrapolator(time);
}
因为我们使用了imu,所以这里不初始化位姿推断器。然后做个信息的打印,告诉用户目前还没有进行位姿初始化,本人打印类似如下:
[ INFO] [1669275089.560128501, 1606808654.733059071]: I1124 15:31:29.000000 173872 local_trajectory_builder_2d.cc:168] Extrapolator not yet initialized.
然后执行如下代码:
CHECK(!synchronized_data.ranges.empty());
// TODO(gaschler): Check if this can strictly be 0.
CHECK_LE(synchronized_data.ranges.back().point_time.time, 0.f);
// 计算第一个点的时间
const common::Time time_first_point =
time +
common::FromSeconds(synchronized_data.ranges.front().point_time.time);
保证点云数据不为空,且最后一个点云的数据,时间为0。且用 synchronized_data.time 时间戳,加上第一个点云相对于该时间戳的时间 synchronized_data.ranges.front().point_time.time 得到第一个点云的时间戳。
// 只有在extrapolator_初始化时, GetLastPoseTime()是common::Time::min()
if (time_first_point < extrapolator_->GetLastPoseTime()) {
LOG(INFO) << "Extrapolator is still initializing.";
return nullptr;
}
如果 第一个点云数据的时间,低于位置估计器最新的位姿时间,说明器还没有完成初始化,但是已经再初始化之中了,因为 extrapolator_->GetLastPoseTime() 没有初始化,则其返回是一个很小的时间戳,判断条件不成立,当然也不会打印。进一步会执行如下代码:
// 预测得到每一个时间点的位姿
for (const auto& range : synchronized_data.ranges) {
common::Time time_point = time + common::FromSeconds(range.point_time.time);
// 如果该时间比上次预测位姿的时间还要早,说明这个点的时间戳往回走了, 就报错
if (time_point < extrapolator_->GetLastExtrapolatedTime()) {
// 一个循环只报一次错
if (!warned) {
LOG(ERROR)
<< "Timestamp of individual range data point jumps backwards from "
<< extrapolator_->GetLastExtrapolatedTime() << " to " << time_point;
warned = true;
}
time_point = extrapolator_->GetLastExtrapolatedTime();
}
// Step: 2 预测出 每个点的时间戳时刻, tracking frame 在 local slam 坐标系下的位姿
range_data_poses.push_back(
extrapolator_->ExtrapolatePose(time_point).cast<float>());
}
该部分的代码暂且简单理解一下,就是 extrapolator_ 会预测出每个点云的时间戳时刻,其 tracking frame 在 local slam(后面称为local) 坐标系下的位姿。这些都后续再进行详细讲解。继续往下看代码:
if (num_accumulated_ == 0) {//该变量构造时,声明为0
// 'accumulated_range_data_.origin' is uninitialized until the last
// accumulation.
//对accumulated_range_data_进行一个空数据的赋值
accumulated_range_data_ = sensor::RangeData{{}, {}, {}};
}
sensor::RangeData 的定义如下:
/**
* @brief local_slam_data中存储所有雷达点云的数据结构
*
* @param origin 点云的原点在local坐标系下的坐标
* @param returns 所有雷达数据点在local坐标系下的坐标, 记为returns, 也就是hit
* @param misses 是在光线方向上未检测到返回的点(nan, inf等等)或超过最大配置距离的点
*/
struct RangeData {
Eigen::Vector3f origin;
PointCloud returns;
PointCloud misses; // local坐标系下的坐标
};
三、激光雷达数据运动畸变矫正原理讲解
接着下面时比较总要的一块代码。那就是对雷达数据因为运动产生的畸变进行矫正,其畸变产生原因以及常用矫正手段可以参考如下博客:
史上最简SLAM零基础解读(11) - 雷达数据运动畸变与矫正
1、形成原因
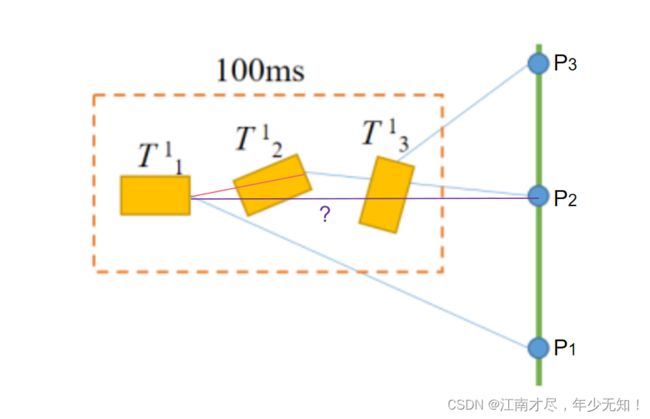
这里简单的提及一下激光雷达数据运动畸变的原:其主要因为一帧雷达数据的所有点云并非同一时刻产生的,如下图三图 a、b、c。(备注:这里不讨论由雷达自身旋转造成的畸变,该种畸变结合激光雷达的角度辨率即可解决)

( 1 ) \color{blue} (1) (1) 先来看 a图,假设在某个时刻,激光雷达测得三个点云数据分别为 P 1 P_1 P1、 P 2 P_2 P2、 P 3 P_3 P3。可以从图像看出, P 2 P_2 P2 应该是距离机器人最近的点云。
( 2 ) \color{blue} (2) (2) 但是实际情况是很难获得这样的点云,除非激光雷达传感器即不旋转也不移动。通常情况下如 b图 所示,机器人的运动是无规则的,同一帧数据时间内的的3个时刻, T 1 1 T_1^1 T11 表示 T 1 T^1 T1 时刻测得点云 P 1 P_1 P1, T 2 2 T_2^2 T22 表示 T 2 T^2 T2 时刻测得点云 P 2 P_2 P2, ⋯ ⋯ \cdots \cdots ⋯⋯。
( 3 ) \color{blue} (3) (3) 从图 b 可以很明显得看到,由于机器人的运动是无规则的,姿态与位置都在发生改变,其测的的点云都是畸变的。如果把其当作正常的点云的使用则会类似 c图 的效果。
( 4 ) \color{blue} (4) (4) 图c 可以看出,其把所有的点云,都认为是在 T 1 T^1 T1 时刻产生:
①首先 P 1 P_1 P1 是没有畸变,是正确的;
②对于 P 2 P_2 P2,来说,测得得距离变短了,然后方向也错了
②对于 P 3 P_3 P3,与 P 2 P_2 P2类似,只是距离更短,方向更偏
2、解决方式
解决距离上的畸变方式有很多种,这里说一下源码是如何实现的。从图二可以看出,只要计算出 P 2 ′ P'_2 P2′、 P 3 ′ P'_3 P3′ 与 P 2 ′ P'_2 P2′、 P 3 ′ P'_3 P3′ 距离差,即可对他们进行矫正。那么如何才能知道这个距离呢?
如果我们知道机器人分别在 T 1 T^1 T1 、 T 2 T^2 T2、 T 3 T^3 T3 时刻下的位姿, 那么可以计算出 T 2 T^2 T2 与 T 3 T^3 T3 相对于 T 1 T^1 T1 的位移,那么就是对 P 2 ′ P'_2 P2′、 P 3 ′ P'_3 P3′ 与 P 2 ′ P'_2 P2′ 进行修正呢。不过要注意,不能简单的加法,因为移动过程中,并非所有位移量都造成了距离上的畸变,如下图所示
根据几何关系是很容易求解的。但是通常会通过矩阵的方式进行求解,源码中也是使用这种方式。因为后续追踪都是基于局部地图 local 坐标系,所以其直接把 T 2 T^2 T2 时刻测得得点云数据 P 2 ′ P'_2 P2′ 或者 T 3 T^3 T3 时刻测得得点云数据 P 3 ′ P'_3 P3′) 结合机器人在 T x T^x Tx 时刻的位姿( local 坐标系),把点云数据变换到 local 坐标系下。原理还是一样的,就是通过 T x T^x Tx 时刻的位姿对该时刻测得得点云 P x ′ P'_x Px′ 进行矫正,矫正之后点云是相对于 local 坐标系。
四、激光雷达数据运动畸变矫正源码分析
下面来看看 Cartographer 中是如何处理的,接着前面的分析,可以首先可以看到如下代码,其进入到一个循环,对所有点云数据进行遍历:
// 对每个数据点进行处理
for (size_t i = 0; i < synchronized_data.ranges.size(); ++i) {
1、点云数据在机器人坐标系的坐标
// 获取在点云数据基于 tracking frame 坐标系的坐标
const sensor::TimedRangefinderPoint& hit =
synchronized_data.ranges[i].point_time;
获取在点云数据基于机器人(tracking frame) 坐标系的坐标,记为 P o i n t t r a c k i n g Point^{tracking} Pointtracking
2、计算雷达原点在local坐标系下的位置
//把雷达在机器人坐标系的位置,变换成雷达在local slam坐标系的位置
const Eigen::Vector3f origin_in_local =
range_data_poses[i] *
synchronized_data.origins.at(synchronized_data.ranges[i].origin_index);
这里的 synchronized_data.origins 存储的是雷达原点在机器人坐标系下的位置,从 SensorBridge::HandleRangefinder 函数中的的如下代码可以看出:
sensor_to_tracking->translation().cast<float>(),
雷达原点在机器人坐标系下的位置记为 L a s e r R a d a r o r i g i n t r a c k i n g LaserRadar^{tracking}_{origin} LaserRadarorigintracking,range_data_poses 与前面一样,表示机器人在 local 坐标系下的位姿,记为 R o b o t t r a c k i n g l o c a l \mathbf {Robot}^{local}_{tracking} Robottrackinglocal,最终获得的结果 origin_in_local 表示激光雷达原点在local坐标系下的位置,记为 L a s e r R a d a r o r i g i n l o c a l LaserRadar^{local}_{origin} LaserRadaroriginlocal,则计算公式如下
L a s e r R a d a r o r i g i n l o c a l = R o b o t t r a c k i n g l o c a l ∗ L a s e r R a d a r o r i g i n t r a c k i n g (01) \color{Green} \tag{01} LaserRadar^{local}_{origin}=\mathbf {Robot}^{local}_{tracking}*LaserRadar^{tracking}_{origin} LaserRadaroriginlocal=Robottrackinglocal∗LaserRadarorigintracking(01)
3、激光雷达运动畸变校正
// Step: 3 运动畸变的去除, 将相对于tracking_frame的hit坐标 转成 local坐标系下的坐标
// 把点云数据变换到 local 坐标系下
sensor::RangefinderPoint hit_in_local =
range_data_poses[i] * sensor::ToRangefinderPoint(hit);
其目的是获得点云数在 local 坐标系下的坐标,记 hit_in_local 为 P o i n t l o c a l Point^{local} Pointlocal。range_data_poses 表示机器人在 local 坐标系下的位姿,记为 R o b o t t r a c k i n g l o c a l \mathbf {Robot}^{local}_{tracking} Robottrackinglocal,sensor::ToRangefinderPoint(hit) 表示点云在机器人坐标系下的位置,记为 P o i n t t r a c k i n g Point^{tracking} Pointtracking,那么计算公式如下:
P o i n t l o c a l = R o b o t t r a c k i n g l o c a l ∗ P o i n t t r a c k i n g (02) \color{Green} \tag{02} Point^{local}=\mathbf {Robot}^{local}_{tracking} * Point^{tracking} Pointlocal=Robottrackinglocal∗Pointtracking(02)
4、计算去畸变点云与激光雷达原点距离
// 计算这个点的距离, 这里用的是去畸变之后的点的距离
const Eigen::Vector3f delta = hit_in_local.position - origin_in_local;
const float range = delta.norm();
hit_in_local.position 表示点云在local坐标系下的坐标系,与前面一样,记为 P o i n t l o c a l Point^{local} Pointlocal,origin_in_local 表示激光雷达原点相对于 local 坐标系的位置,记为 L a s e r R a d a r o r i g i n l o c a l LaserRadar^{local}_{origin} LaserRadaroriginlocal,可知他们都位于 local 坐标系下,即可做差运算得到 delta,也就是点云先对于雷达原点的坐标,记为 P o i n t o r i g i n Point^{origin} Pointorigin,那么计算公式如下:
P o i n t o r i g i n = P o i n t l o c a l − L a s e r R a d a r o r i g i n l o c a l (03) \color{Green} \tag{03} Point^{origin}=Point^{local}-LaserRadar^{local}_{origin} Pointorigin=Pointlocal−LaserRadaroriginlocal(03)这里的 P o i n t o r i g i n Point^{origin} Pointorigin也可以看作是从激光雷达原点指向点云数据的向量,对其求范数 .norm() 也就是求该向量的长度等价于激光雷达原点到点云的直线距离。
4、根据参数对雷达数据进行过滤
在 src/cartographer/configuration_files/trajectory_builder_2d.lua 文件中可以看到如下参数:
min_range = 0., -- 雷达数据的最近滤波, 保存中间值
max_range = 30., -- 雷达数据的最远滤波, 保存中间值
对于于源码中的 options_.min_range() 与 options_.max_range(),代码如下:
// param: min_range max_range
if (range >= options_.min_range()) {//如果该点云大于等于最近测量距离
if (range <= options_.max_range()) {//如果该点小于等于最远测量距离
// 在这里可以看到, returns里保存的是local slam下的去畸变之后的点的坐标
accumulated_range_data_.returns.push_back(hit_in_local);
} else {
// Step: 4 超过max_range时的处理: 用一个距离进行替代, 并放入misses里
hit_in_local.position =
origin_in_local +
// param: missing_data_ray_length, 是个比例, 不是距离
options_.missing_data_ray_length() / range * delta;
accumulated_range_data_.misses.push_back(hit_in_local);
}
}
如果点云大于等于最近测量距离、且小于等于最远测量距离,那么则把该点云添加到 accumulated_range_data_.returns 变量中,如果该点云大于最远测量距离,则用如下代码代替:
hit_in_local.position =
origin_in_local +
// param: missing_data_ray_length, 是个比例, 不是距离
options_.missing_data_ray_length() / range * delta;
origin_in_local 表示激光雷达原点在 local 坐标系的位置,然后加上一个缩小后的delta(激光雷达原点到点云的直线距离)。缩小比例由 src/cartographer/configuration_files/trajectory_builder_2d.lua 的 missing_data_ray_length 参数控制,该值约小,则缩 hit_in_local.position 的值越小,但是始终大于 origin_in_local,因为雷达数据不应该为负数。然后存储在 accumulated_range_data_.misses 变量之中。
五、结语
// 对每个数据点进行处理
for (size_t i = 0; i < synchronized_data.ranges.size(); ++i) {
通过上面的循环之后,就对所有的点云数据都进行了校正,值得注意的是,校正之后的点云数据都存储于 accumulated_range_data_ 变量之中,且所有的点云都是相对于 local 坐标系的。这样,该篇博客对于激光雷达运动畸变校正就讲解完成了。其中跳过了如下代码:
// Step: 2 预测出 每个点的时间戳时刻, tracking frame 在 local slam 坐标系下的位姿
range_data_poses.push_back(
extrapolator_->ExtrapolatePose(time_point).cast<float>());
如何获取 range_data_poses,即机器人在local 坐标系下的位姿,还没有进行详细的讲解,暂且放一放。