OpenCV-直方图反向投影
直方图反向投影
目标
本节我们将要学习直方图反向投影
原理
直方图反向投影是由 Michael J. Swain 和 Dana H. Ballard 在他们的文章“Indexing via color histograms”中提出。
那它到底是什么呢?它可以用来做图像分割,或者在图像中找寻我们感兴趣的部分。简单来说,它会输出与输入图像(待搜索)同样大小的图像,其中的每一个像素值代表了输入图像上对应点属于目标对象的概率。用更简单的话来解释,输出图像中像素值越高(越白)的点就越可能代表我们要搜索的目标(在输入图像所在的位置)。这是一个直观的解释。直方图投影经常与 camshift算法等一起使用。
我们应该怎样来实现这个算法呢?首先我们要为一张包含我们要查找目标的图像创建直方图(在我们的示例中,我们要查找的是草地,其他的都不要)。我们要查找的对象要尽量占满这张图像(换句话说,这张图像上最好是有且仅有我们要查找的对象)。最好使用颜色直方图,因为一个物体的颜色要比它的灰度能更好的被用来进行图像分割与对象识别。接着我们再把这个颜色直方图投影到输入图像中寻找我们的目标,也就是找到输入图像中的每一个像素点的像素值在直方图中对应的概率,这样我们就得到一个概率图像,最后设置适当的阈值对概率图像进行二值化,就这么简单。
Numpy 中的算法
此处的算法与上边介绍的算法稍有不同。
首先,我们要创建两幅颜色直方图,目标图像的直方图(‘M’),(待搜索)输入图像的直方图(‘I’)。
# -*- coding: utf-8 -*-
"""
Created on Sat Jan 18 10:52:34 2014
@author: duan
"""
import cv2
import numpy as np
from matplotlib import pyplot as plt
#roi is the object or region of object we need to find
roi = cv2.imread('rose_red.png')
hsv = cv2.cvtColor(roi,cv2.COLOR_BGR2HSV)
#target is the image we search in
target = cv2.imread('rose.png')
hsvt = cv2.cvtColor(target,cv2.COLOR_BGR2HSV)
# Find the histograms using calcHist. Can be done with np.histogram2d also
M = cv2.calcHist([hsv],[0, 1], None, [180, 256], [0, 180, 0, 256] )
I = cv2.calcHist([hsvt],[0, 1], None, [180, 256], [0, 180, 0, 256] )
计算比值:R = M/I 。反向投影 R,也就是根据 R 这个”调色板“创建一副新的图像,其中的每一个像素代表这个点就是目标的概率。例如 B (x, y) =R [h (x, y), s (x, y)],其中 h 为点(x,y)处的 hue 值,s 为点(x,y)处的saturation 值。最后加入再一个条件 B (x, y) = min [B (x, y), 1]。
h,s,v = cv2.split(hsvt)
B = R[h.ravel(),s.ravel()]
B = np.minimum(B,1) B = B.reshape(hsvt.shape[:2])
现在使用一个圆盘算子做卷积,B = D × B,其中 D 为卷积核。
disc = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5))
B=cv2.filter2D(B,-1,disc)
B = np.uint8(B)
cv2.normalize(B,B,0,255,cv2.NORM_MINMAX)
现在输出图像中灰度值最大的地方就是我们要查找的目标的位置了。如果我们要找的是一个区域,我们就可以使用一个阈值对图像进行二值化,这样就可以得到一个很好的结果了。
ret,thresh = cv2.threshold(B,50,255,0)
OpenCV 中的反向投影
OpenCV 提供的函数 cv2.calcBackProject() 可以用来做直方图反向投影。它的参数与函数 cv2.calcHist 的参数基本相同。其中的一个参数是我们要查找目标的直方图。同样再使用目标的直方图做反向投影之前我们应该先对其做归一化处理。返回的结果是一个概率图像,我们再使用一个圆盘形卷积核对其做卷操作,最后使用阈值进行二值化。下面就是代码和结果:
# -*- coding: utf-8 -*-
"""
Created on Sat Jan 18 10:08:25 2014
@author: duan
"""
import cv2
import numpy as np
roi = cv2.imread('tar.jpg')
hsv = cv2.cvtColor(roi,cv2.COLOR_BGR2HSV)
target = cv2.imread('roi.jpg')
hsvt = cv2.cvtColor(target,cv2.COLOR_BGR2HSV)
# calculating object histogram
roihist = cv2.calcHist([hsv],[0, 1], None, [180, 256], [0, 180, 0, 256] )
# normalize histogram and apply backprojection
# 归一化:原始图像,结果图像,映射到结果图像中的最小值,最大值,归一化类型
#cv2.NORM_MINMAX 对数组的所有值进行转化,使它们线性映射到最小值和最大值之间
# 归一化之后的直方图便于显示,归一化之后就成了 0 到 255 之间的数了。
cv2.normalize(roihist,roihist,0,255,cv2.NORM_MINMAX)
dst = cv2.calcBackProject([hsvt],[0,1],roihist,[0,180,0,256],1)
# Now convolute with circular disc
# 此处卷积可以把分散的点连在一起
disc = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5))
dst=cv2.filter2D(dst,-1,disc)
# threshold and binary AND
ret,thresh = cv2.threshold(dst,50,255,0) # 别忘了是三通道图像,因此这里使用 merge 变成 3 通道
thresh = cv2.merge((thresh,thresh,thresh))
# 按位操作
res = cv2.bitwise_and(target,thresh)
res = np.hstack((target,thresh,res))
cv2.imwrite('res.jpg',res)
# 显示图像
cv2.imshow('1',res)
cv2.waitKey(0)
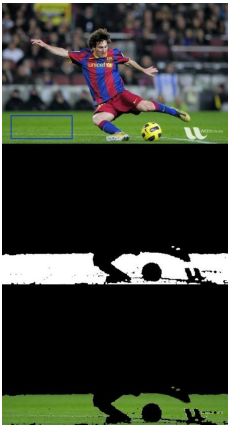
下面是我使用的一幅图像。我使用图中蓝色矩形中的区域作为取样对象,再根据这个样本搜索图中所有的类似区域(草地)。