从零制作视觉抓取机械臂实物系列:一、让机械臂实物动起来(2)
python简介以及开发环境搭建
- python简介
- python开发环境搭建
-
- pycharm安装
- anaconda安装
- 巧用github
python简介
对于初学者和完成简单的demo,Python语言是首选。因为python压榨了电脑然后优待了我们用户,举个例子,完成同样一个功能, C语言可能要写200行代码,而Python可能只要20行,但是C语言这200行代码运行只要1秒,而Python 运行这两百行代码需要10秒。至于为啥,相信你用个一年半载的你就明白内部机制了,这里不废话。Python 是一种解释型、面向对象、动态数据类型的高级程序设计语言,而且很多东西我们可以站在巨人的肩膀上——调用代码包。没学过python的小伙伴也不要慌张,因为python是真的简单,我举个例子吧:
就跟你写稍微格式比较优雅的自然语言(英语)差不多。你跟着我敲两句代码就学会了(当然是简单的部分,不过这门课足够了)。学语言就是做项目的时候边做边学,自己看了半天教程,啥事没干,学个寂寞!
python开发环境搭建
这里我们需要先理解几个概念
编译器:python2.exe,python3.exe。就是将程序编译成机器能处理的二进制文件。
编辑器:pycharm,一个功能较高级的文本记事器,用于编辑程序
好,现在大声读10遍,编译器是翻译工具,编辑器是编辑工具,牢记这两个概念。
软件包:pygame、serial、opencv等,前人的肩膀,我们直接站上去就好了
编译器与软件包管理工具:anaconda,自带python编译器以及各种软件包,编译器与软件包的安装与版本管理,虚拟环境,日后做深度学习也是一个非常棒的工具
开源代码:巧用github与码云
pycharm安装
anaconda安装
1、下载安装:anaconda官网:https://www.anaconda.com/products/individual
下载对应自己系统的64-bit的安装包,安装
2、设置环境变量:
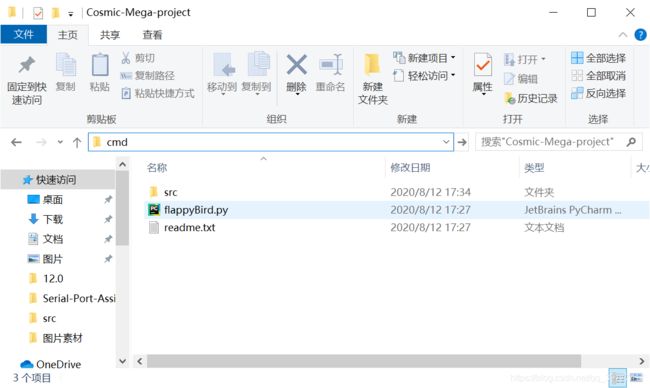
环境变量的作用展示:打开网易云音乐所在的文件夹,在目录中输入cmd,
运行cloudmusic.exe ,在返回桌面打开cmd,运行cloudmusic.exe 做对比,添加path后在如此试试看有何区别。
添加anaconda环境变量:在anaconda3目录下找到Scripts目录,Scripts的意思就是脚本的意思,里面都是exe的可执行程序。把这个目录添加进系统环境变量Path里。
3、修改镜像源:清华源官网提供的使用帮助:https://mirror.tuna.tsinghua.edu.cn/help/anaconda/
这里只介绍windows下的方法:先在cmd下执行 conda config --set show_channel_urls yes生成.condarc 文件之后再修改。
注意:生成的文件路径不在安装目录,在C盘用户自己目录下往最下面拉

用记事本打开,删除里面的内容并替换成以下内容:
注:这里需要把官网上给的https全部替换成http,不然后面下载包时会报错。
channels:
- defaults
show_channel_urls: true
channel_alias: http://mirrors.tuna.tsinghua.edu.cn/anaconda
default_channels:
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/r
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/pro
- http://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/msys2
custom_channels:
conda-forge: http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
msys2: http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
bioconda: http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
menpo: http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
pytorch: http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
simpleitk: http://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
然后保存退出,再运行 conda clean -i 清除索引缓存,保证用的是镜像站提供的索引。至此,conda镜像更改完毕。
4、创建虚拟环境
在cmd中输入:conda create -n py36 python=3.6
等待一会窗口出现
输入 y并敲回车即可完成,成功后出现这三个done的提示就说明成功了

然后关闭该cmd,重新打开cmd,输入conda init即可
5、如何进入虚拟环境并运行 “hello robot”
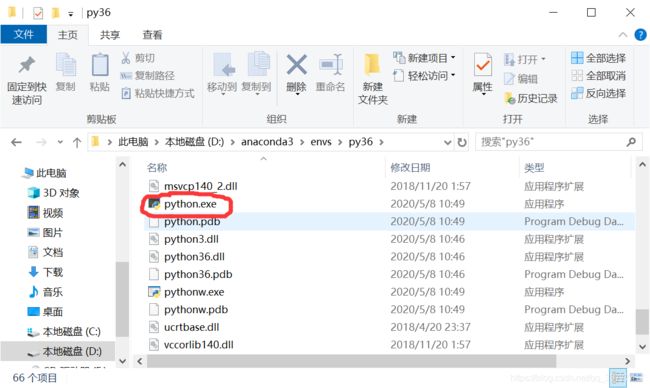
我们先找到此虚拟环境所在的位置,创建的所有虚拟环境都将在anaconda安装目录下一个叫envs的文件夹下,envs就是environments的缩写,现在你要做的就是记住这个文件夹,以后有大用处。

打开刚刚创建的py36, 往下面拖拖就能找到python.exe文件了,这就是这个虚拟环境的编译器
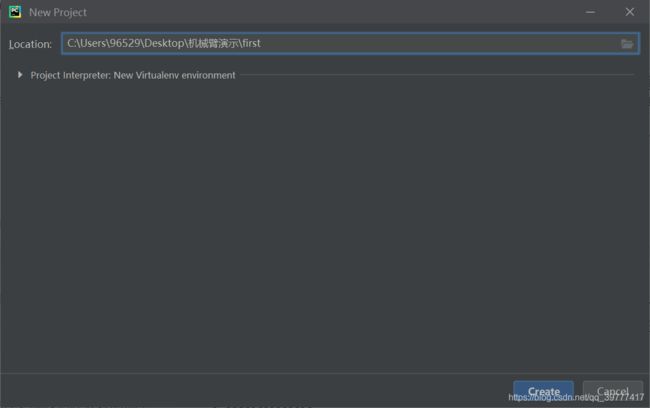
然后我们提前给自己的代码建立一个有序的文件夹,方便自己的查找,这个文件夹建立几层,放哪都可以。打开pychrm,新建一个工程,选择之前我们建立好的那个文件夹,其他的不用管,因为我们后面还可以修改,然后点击 create
然后进入pycharm的主界面,我们之前说过了这个pycharm它仅仅是个编辑器是吧,那我们还得给他添加编译器呀,现在我们之前创建得那个虚拟环境就其作用了,我们点击左上角的file,然后点击Settings

我们可以先给自己换个舒服的字体大小
然后点击Project:XXX,然后点子选项Project Interpreter,中文意思就是项目编译器啦,就会出现以下画面。
点击这个齿轮


选择Add
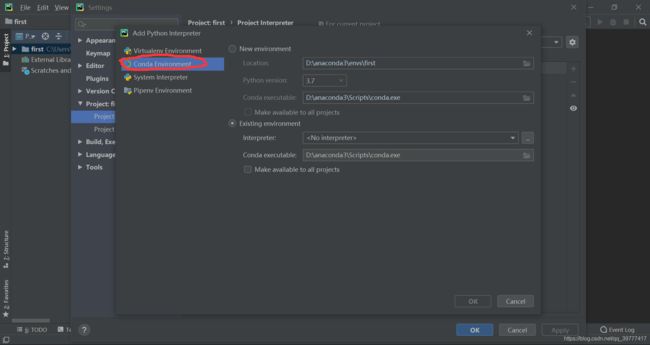

选择我们刚刚创建的虚拟环境的那个文件夹下的编译器,然后点击OK,然后把一直OK下去。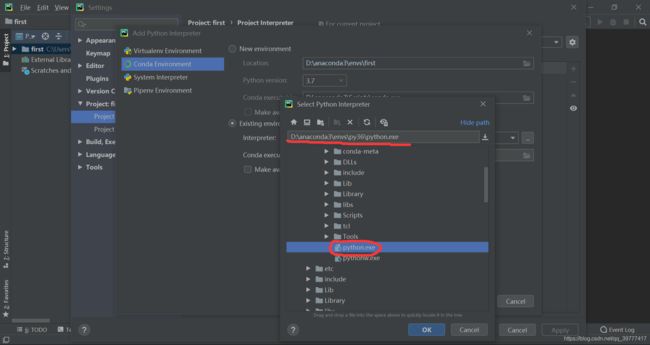
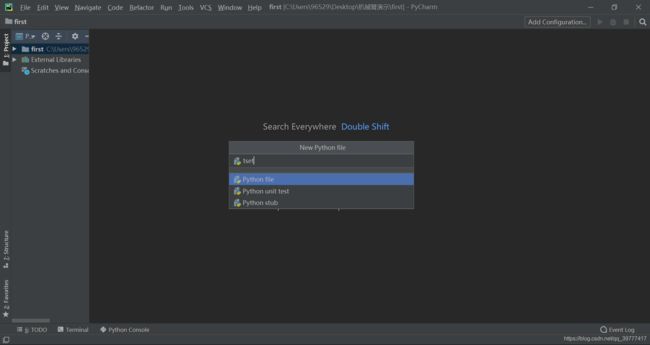
现在我们有了编译器了,那来写两句代码试试呢。可是我们的项目还空空如也呢,右键点击我们创建的项目文件目录first,然后点击New,然后点Python File

然后给我们的文件取个名字,这里就去test把。然后点击Python File就可以生成这个test.py文件了。
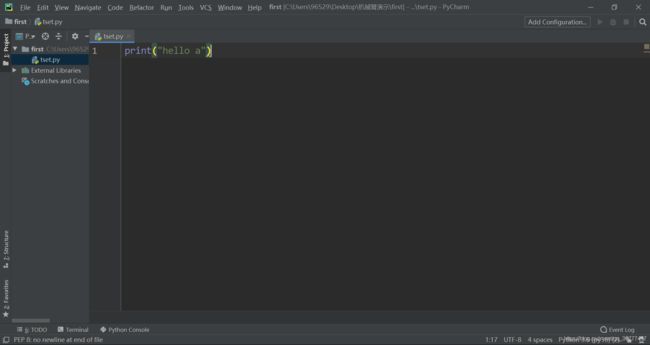
然后输入print("hello a")啊
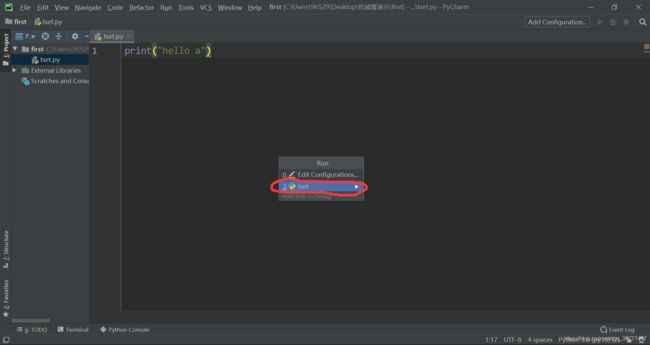
第一次运行这个文件的时候都需要点击 Run ,在点击Run…
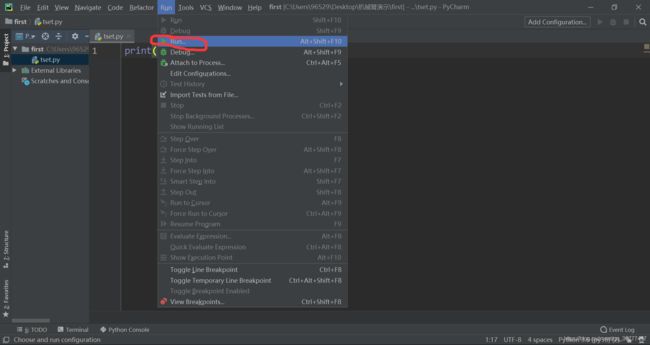
然后出现,我们双击要运行的文件,就是test.py,然后程序就运行了
看输出,大功告成,
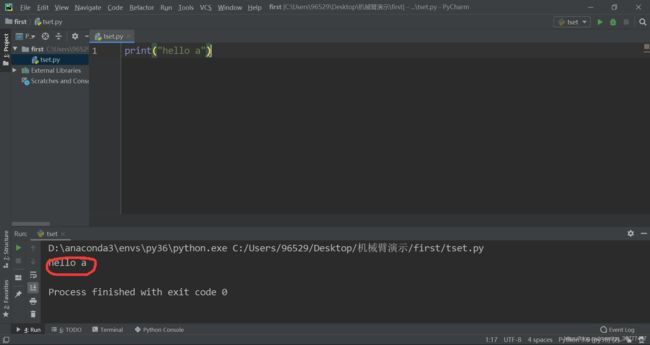
注:以后运行就可以点击那个绿色按钮了
加载虚拟环境的编译器后,pycharm的cmd就自动进入了虚拟环境

巧用github
6、如何巧用虚拟环境运行一个大项目
很多小伙伴要问了,搞了这么复杂的步骤,就这?就这?
先不要慌,来了来了
打开github,注册一个,关键词搜索 Cosmic Mega project (中文意思就是宇宙超级大项目),当然也可以搜索其他关键词,比如我们搜索机械臂相关的,中英文都可以试试,但是中文可能没几个,然后选择自己喜欢的语言

点进去,我们摒弃那些花里胡哨的,用最简单粗暴的方式下载下来。这个项目有10多M,大家没有外网的话下起来会非常慢,这里推荐大家去看我B站的一期视频,可能得下半个小时吧,

此招不行另行其他招呗,我们点击这个Fork,添加分支,也就是把这个项目加入我们的仓库中来,我们可以在自己的仓库看见这个项目了:

码云:https://gitee.com/
这里大家得先注册一下,然后登录
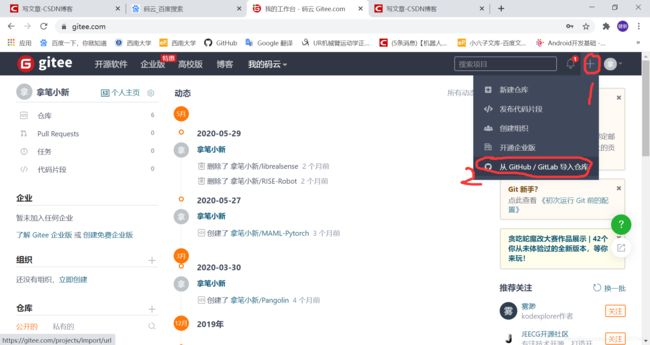

找到该项目,点击导入,其实就是把github的项目导入码云,这个过程需要一段时间,我们得等等

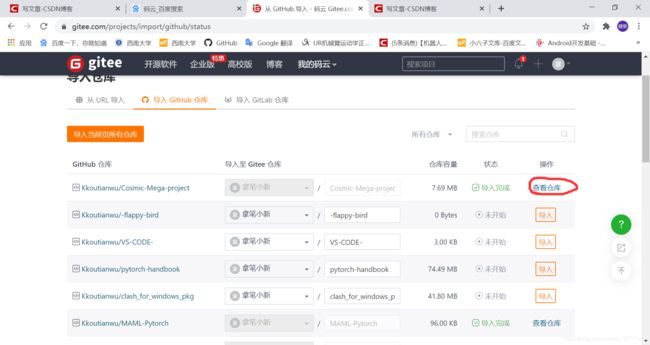
我们再从码云上下载,速度非常nice,相当于码云接入github的网速很快,我们接入码云的网速很快,码云给我们做了个中转而已。

下载下来后打开所在文件夹,不知道文件路径的同学可以用CTRL+J开打最近下载,然后将其解压并复制到我们机器人的文件夹里。然后回到pycharm点击File,点击Open

选后选择刚刚那个项目所在的文件夹,然后OK,然后选择new window 与this window都行,看你要不要保留之前这个窗口

注意这里不要直接打开.py文件,这里需要注意的是先把pycharm的窗口都关闭,不然会直接在之前我们建好的那个项目下,这不是我们想要的,因为这是一个新的项目。
然后用刚才的方法再添加一次编译器,然后运行,
最后你会发现报错,缺少软件包
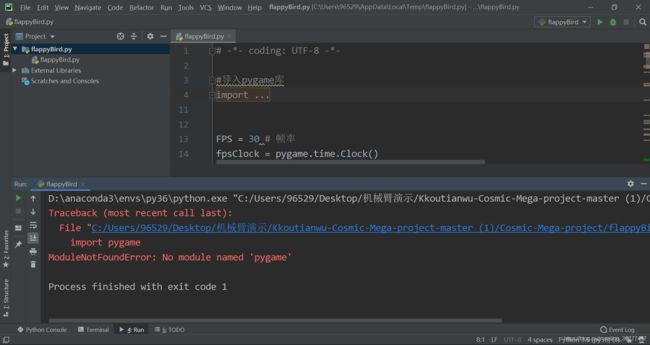
那我们先来看看它需要哪些包呢,有一些软件包是系统自带的,有一些需要我们自行安装

现在我们的之前搭建的虚拟环境的作用就体现出来啦,我们点击Terminal窗口,这个窗口其实就相当于我们在这个.py文件的目录下输入cmd出现的cmd窗口时是一样的。

唯一的区别就是这里因为刚刚我们选了虚拟环境下的编译器,这里已经自动帮我们激活这个虚拟环境了,我们也可以用cmd窗口激活,在cmd窗口中输入conda activate py36同样可以激活。激活的标志如下

pycharm这里选了虚拟环境下的编译器,就自动激活了

至此这个虚拟环境的作用就体现出来了,在conda虚拟环境中,安装包非常的方便快捷,依赖包以及版本都会自动给你处理好,这些即可用conda install 包名来安装包,也可以用pip install 包名来安装,反正先用conda,不行再用pip,如果还不行,就百度看包名是否不正确,有一些包得安装名称与导入名称就不一样(这个项目的软件包涵盖了这3种情况,带你们把坑都给踩一遍)。我这里就先用conda install pygame,结果装不上,我用pip install pygame就好了,成功得标志是出现以下信息,不然就是没好
 或者出现:
或者出现:

再运行,还报错,还少包

继续装,所有包都装完后,再次运行,OK,完美

最后讲一下这个conda虚拟环境的另一个作用,我们介绍python的时候不是说了python2与python3全都要吗,虚拟环境就很好的完成了这一点,现在我们环境是py3.6,然后我们找到了一个py2.7的代码,我们就直接再创建一个py2.7的虚拟环境就好了,如果你不用conda虚拟环境而用传统的全局环境,那你就得卸载py3.6,然后再安装2.7
该教程的视频与源码:包括机械臂系统从上到下的梳理、机械臂的硬件、通讯与控制