【PCL自学:kdTree】PCL中kd-Tree的原理及使用(持续更新)
Kd-Tree结构体及其使用
- 一、Kd-Tree结构体及其使用
-
- 1)原理:什么是kd-Tree?
- 2)实践:如何使用PCL?
一、Kd-Tree结构体及其使用
在本章中,我们将学习如何使用KdTree来找到一个特定的点或位置的K个最近的邻点,然后我们还将学习如何在用户指定的某个半径内(在本例中是随机的)找到所有的邻点。
1)原理:什么是kd-Tree?
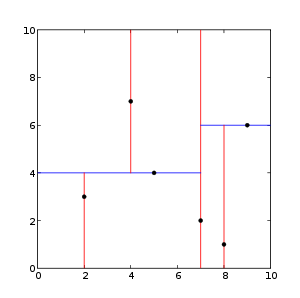
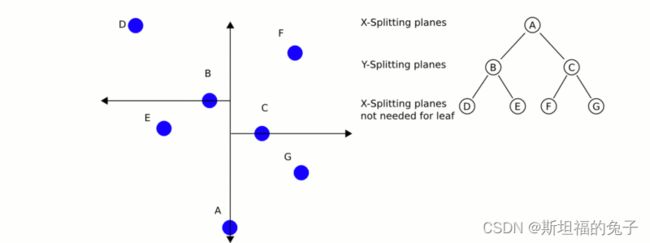
k-dTree,称为k维树,是计算机科学中用于组织k维空间中的一些点的一种数据结构。它是一棵二叉搜索树,K-d树对于距离和最近邻搜索非常有用。在进行特征点计算或者点云配准等工作时常用,可以用来减小搜索时间,我们通常只处理三维的点云,所以我们所有的k-d树都是三维的。k-d树的每一层都使用垂直于相应轴的超平面,沿着特定的维度分割所有子节点。在树的根,所有的子树将基于第一个维度进行分割(例如,如果第一个维度的坐标小于根,它将在左子树中,如果它大于根,它将明显在右子树中)。树中的每一层向下划分到下一个维度,当所有其他维度都耗尽时,返回到第一个维度。构建k-d树的最有效方法是使用一种排序划分方法,比如【快速排序】将中值放在根上,将一维值较小的值放在左边,较大的值放在右边。然后在左右子树上重复这个过程,直到要划分的最后一个树仅由一个元素组成。在二维数据上建立KD-tree结构如下图所示。




2)实践:如何使用PCL?
如果不是专业搞计算优化的同学,对于kd-Tree的原理我们只需要做到略懂即可,找工作面试能说出其所以然就行了。在实际使用中,我们只需要知道通过把点云变成KD-Tree的排列方式可以加快搜索的速度即可。
那么如何使用KD-Tree结构呢,或者说如何把点云排列成KD-Tree形式呢,请看如下代码:
#include 【博主简介】
斯坦福的兔子,男,天津大学机械工程工学硕士。毕业至今从事光学三维成像及点云处理相关工作。因工作中使用的三维处理库为公司内部库,不具有普遍适用性,遂自学开源PCL库及其相关数学知识以备使用。谨此将自学过程与君共享。
博主才疏学浅,尚不具有指导能力,如有问题还请各位在评论处留言供大家共同讨论。
若前辈们有工作机会介绍欢迎私信。