视觉slam框架:StructSLAM
StructSLAM: Visual SLAM With Building Structure Lines
StructSLAM:具有建筑结构线的视觉 SLAM
摘要:
我们提出了一种基于人造建筑环境结构规律的新型 6 自由度 (DoF) 视觉同步定位和映射 (SLAM) 方法。 这个想法是我们使用建筑结构线作为定位和映射的特征。 与其他线特征不同,建筑结构线对全局方向信息进行编码,该信息会随着时间的推移限制相机的航向,从而消除累积的方向误差并减少位置漂移。 我们扩展了标准扩展卡尔曼滤波器视觉 SLAM 方法,采用具有新的参数化方法的建筑结构线,该方法表示主要方向上的结构线。 已经在合成场景和真实世界场景中进行了实验。 结果表明,我们的方法在位置误差和方向误差方面明显优于现有方法。 在公共 RAWSEEDS 数据集的室内场景测试中,在车轮里程表的帮助下,我们的方法在 967 米的路径上产生了约 0.79 米的有界位置误差,尽管没有应用闭环算法。
介绍:
同时定位和地图绘制 (SLAM) 是自动驾驶汽车导航的一个关键问题,计算机视觉和机器人社区已经对其进行了多年研究。 以摄像头作为传感器输入的视觉 SLAM 有利于应用于对系统成本、能量和重量要求有限的平台,例如微型飞行器系统。 在过去的十年中已经提出了许多视觉 SLAM 方法。 他们中的许多人使用点作为特征来估计相机姿态和由稀疏点云表示的周围环境地图。
当场景包含稳定的特征点时,最先进的视觉 SLAM 算法 [1]、[2] 可以产生与激光距离扫描仪精度相媲美的结果。 然而,如果场景中的特征点很少,视觉SLAM算法通常会在位置和方向上产生较大的漂移误差,甚至无法工作。 它通常发生在主要由无纹理表面组成的场景中。 有些还使用线特征视觉 SLAM [3]-[6]。 当场景中没有足够的点特征时,线特征是很好的补充。 然而,基于线的视觉 SLAM 方法在性能上基本上没有显着改善,并且由于难以稳健地跟踪线,有时会产生更差的结果。
无论是使用点特征还是线特征,视觉SLAM方法都有众所周知的漂移问题,这意味着定位误差会随着时间的推移而累积。 如果没有一些特殊处理,例如闭环算法 [7] 或一些辅助传感器,则很难在大规模环境中达到理想的精度。
人造建筑在我们的生活环境中随处可见,表现出很强的结构规律性。 在大多数情况下,人造建筑可以抽象为三个主要方向堆叠在一起的块,这被称为曼哈顿世界假设[8]。
Manhattan world: Compass direction from a single image by Bayesian inference
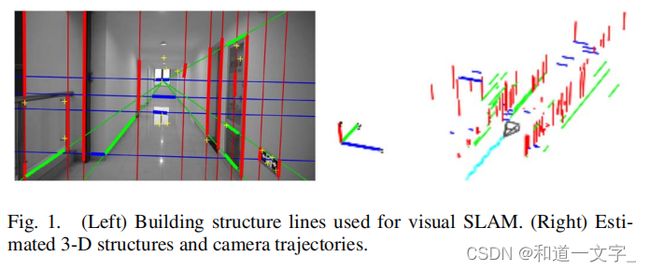
研究人员将观察作为先验知识用于室内建模 [9]、[10]、场景理解 [11] 和航向估计 [12] 等应用。 受人造建筑这种强烈规律性的启发,我们提出了一种新颖的视觉 SLAM 方法,该方法采用建筑结构线进行定位和映射。 建筑结构线是指与建筑的三个主要方向对齐的线,如图1所示。
结构线特征与现有视觉SLAM系统[6]中使用的线特征之间的主要区别在于结构线编码全局方向信息。 采用建筑结构线作为地标的好处是显而易见的:可以消除累积的方向误差。 从而减少累积位置误差,提高SLAM系统的精度。
正如我们在实验中所看到的,所提出的方法在准确性和鲁棒性方面都优于最先进的视觉 SLAM 方法。 在使用 RAWSEEDS 数据集的测试中,通过使用里程计作为运动预测器,我们的方法在不应用任何闭环算法的情况下沿 967 米的路径产生小于 1 米的有界位置误差。 我们还展示了我们的方法在现有视觉 SLAM 方法失败的具有挑战性的情况下的稳健性。 我们强调我们工作的主要贡献如下。
我们通过一种新颖的参数化方法为 6 自由度 (DoF) SLAM 采用三个主导方向的建筑结构线,全局约束相机方向并因此减少整体漂移误差,使 6-DoF 视觉 SLAM 在有人造建筑的环境中更加稳定和准确。
由 3-D 结构线构建的地图提供了场景的额外信息,这对于场景建模和理解非常有用。 所提出的视觉 SLAM 方法在室内车辆技术的应用中具有潜在用途,例如室内停车场和自主服务机器人。
总结:
该方法使用了机器人的里程计信息,用来做机器人的状态更新,使用了线特征的提取,使用RANSAC去除异常的线段,提出了一种以结构构造线为新特征与点特征互补的可视化6自由度SLAM方法。我们的方法在合成场景和真实场景中都得到了验证。结果表明,对于缺乏点特征的室内环境,传统的基于点的SLAM会产生较大的漂移误差甚至失效,而我们的方法在处理结构线时效果良好,并且由于相机方位角的全局约束,漂移误差小得多。结果表明,当场景中存在不与三个主要方向对齐的线段时,该方法仍然通过采用鲁棒数据关联方法工作良好,表明了该方法的鲁棒性。
论文链接:
https://ieeexplore.ieee.org/document/7001715
开源链接:
https://github.com/x007dwd/StructSLAM