【第一周】深度学习和pytorch基础
深度学习
深度学习的缺陷
- 算法输出不稳定,容易被“攻击”
- 模型复杂度高,难以纠错和调试
- 模型层级复合程度高,参数不透明
- 端到端训练方式对数据依赖性强,模型增量性差(当样本数据量小的时候,深度学习无法体现强大拟合能力)
- 专注直观感知类问题,对开放性推理问题无能为力
- 人类知识无法有效引入进行监督,机器偏见难以避免
可解释性
2017年7月,国务院在《新一代人工智能发展规划》中提出“实现具备高可解释性、强泛化能力的人工智能”。
可解释性:
- 知道哪些特征对输出有重要影响,出了问题准确快速纠错
- 双向:算法能被人的知识体系理解 + 利用和结合人类知识
- 知识得到有效存储、积累和复用——越学越聪明
浅层神经网络
每个神经元的输出可表示为以下函数:

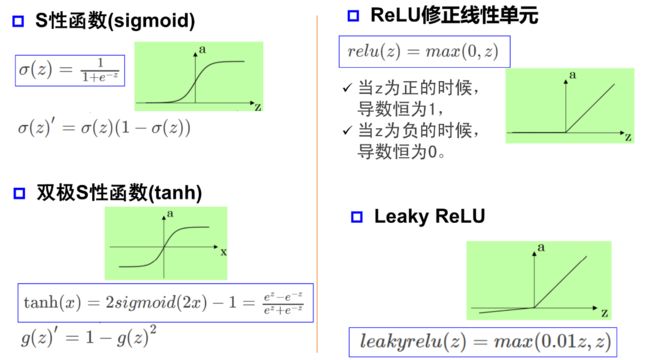
激活函数
激活函数 引入非线性因素
引入非线性因素
万有逼近定理
单隐层神经网络可视化工具 —— A Neural Network Playground
如果一个隐层包含足够多的神经元,三层前馈神经网络(输入- 隐层 - 输出)能以任意精度逼近任意预定的连续函数。
当隐层足够宽时,双隐层感知器(输入 - 隐层1 - 隐层2 - 输出)可以逼近任意非连续函数:可以解决任何复杂的分类问题。
神经网络每一层的作用
神经网络学习如何利用矩阵的线性变换加激活函数的非线性变换,将原始输入空间投影到线性可分的空间去分类/回归。
每层神经网络的输出可表示为以下函数:
![]()
该函数实现了输入到输出空间的变换,其中 ![]() 实现升维/降维,放大/缩小和旋转;
实现升维/降维,放大/缩小和旋转; 实现平移;
实现平移; 实现弯曲。
实现弯曲。
神经网络的深度与宽度
增加节点数:增加维度,即增加线性转换能力。
增加层数:增加激活函数的次数,即增加非线性转换次数
在神经元总数相当的情况下,增加网络深度可以比增加宽度带来更强的网络表示能力:产生更多的线性区域。
深度和宽度对函数复杂度的贡献是不同的,深度的贡献是指数增长的,而宽度的贡献是线性的。

其中 表示参数每层参数对函数复杂度的贡献,
表示参数每层参数对函数复杂度的贡献, 表示参数数量,
表示参数数量, 表示深度对函数复杂度的贡献,和都是一个区间即相同的参数在不同数值下仍然有不同的复杂度。
表示深度对函数复杂度的贡献,和都是一个区间即相同的参数在不同数值下仍然有不同的复杂度。 表示最大深度,
表示最大深度, 表示第层。
表示第层。
前向传播和反向传播

局部最小值与梯度消失

假设每一层网络的输出为 ,其中
,其中 代表第层,
代表第层, 代表第层的输入,
代表第层的输入, 是激活函数,那么
是激活函数,那么![]() 。在梯度下降时,参数的更新为
。在梯度下降时,参数的更新为
![]()
其中![]() ,如果此部分大于1,那么层数增多的时候,最终的求出的梯度更新将以指数形式增加,即发生梯度爆炸;如果此部分小于1,那么随着层数增多,求出的梯度更新将会以指数形式衰减,即发生了梯度消失。
,如果此部分大于1,那么层数增多的时候,最终的求出的梯度更新将以指数形式增加,即发生梯度爆炸;如果此部分小于1,那么随着层数增多,求出的梯度更新将会以指数形式衰减,即发生了梯度消失。
解决方案:
Layer-wise Pre-train:2006年Hinton等提出的训练深度网路的方法,用无监督数据作分层预训练,再用有监督数据fine-tune(DBN, 2006)。
ReLU:新的激活函数解析性质更好,克服了sigmoid函数和tanh函数的梯度消失问题(AlexNet, 2012)。
辅助损失函数:e.g. GoogLeNet中的两个辅助损失函数,对浅层神经元直接传递梯度(Inception V1, 2013)。
Batch Normalization:逐层的尺度归一(Inception V2, 2014)。
LSTM:通过选择记忆和遗忘机制克服RNN的梯度消失问题,从而可以建模长时序列。
Pytorch
PyTorch 是一个 Python 库,它主要提供了GPU加速的张量计算 (Tensor Computation) 功能和构建在反向自动求导系统上的深度神经网络功能,使用时需导入torch包。
Pytorch使用torch.Tensor张量类定义数据,torch.autograd.Function函数类定义数据操作。
Tensor
Tensor的关键组成:
- data属性,用来存数据
- grad属性,用来存梯度
- grad_fn,用来指向创造自己的Function
定义数据
Tensor支持各种各样类型的数据,包括:
torch.float32, torch.float64, torch.float16, torch.uint8, torch.int8, torch.int16, torch.int32, torch.int64
x = torch.tensor(666) # 一个数
x = torch.tensor([1,2,3,4,5,6]) # 一维向量
# 值全为1的任意维度的张量
# torch.ones(size=(int ...), dtype=None)
x = torch.ones(2,3)
# 对角线全1,其余部分全0的二维数组
x = torch.eye(2,3)
# 返回从start到end(不包括端点)步长为step的一维张量
# torch.arange(start=0, end, step=1)
a = torch.arange(0, 10, 2)
# 返回从start到end(包括端点)的等距的steps个数据点
# torch.linspace(start, end, steps)
b = torch.linspace(0, 10, 2)
print(a) # tensor([0, 2, 4, 6, 8])
print(b) # tensor([ 0., 10.])
# 从区间[0,1)的均匀分布中抽取的一组随机数
x = torch.rand(2,3)
# 从标准正态分布(均值为0,方差为1)中抽取的一组随机数
x = torch.randn(2,3)
# 基于现有的tensor,创建一个新tensor,
# 从而可以利用原有的tensor的dtype,device,size之类的属性信息
y = x.new_ones(5,3) #tensor new_* 方法,利用原来tensor的dtype,device定义操作
凡是用Tensor进行各种运算的,都是Function
- 基本运算,加减乘除,求幂求余
- 布尔运算,大于小于,最大最小
- 线性运算,矩阵乘法,求模,求行列式
基本运算: abs/sqrt/div/exp/fmod/pow ,一些三角函数 cos/sin/asin/atan2/cosh,其他函数 ceil/round/floor/trunc
布尔运算: gt/lt/ge/le/eq/ne, topk, sort, max/min
线性计算: trace, diag, mm/bmm,t,dot/cross,inverse,svd等
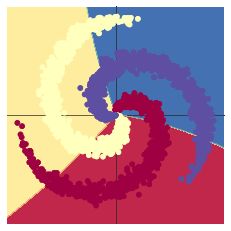
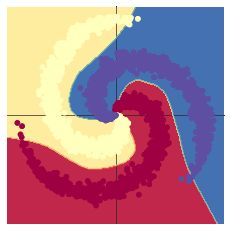
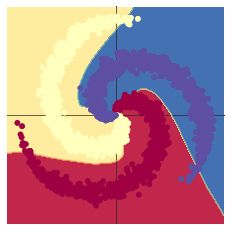
螺旋数据分类
learning_rate = 1e-3
lambda_l2 = 1e-5
# nn 包用来创建线性模型
# 每一个线性模型都包含 weight 和 bias
model = nn.Sequential(
nn.Linear(D, H),
nn.ReLU(),
nn.Linear(H, H2),
nn.ReLU(),
nn.Linear(H2, C)
)
model.to(device) # 把模型放到GPU上
# nn 包含多种不同的损失函数,这里使用的是交叉熵(cross entropy loss)损失函数
criterion = torch.nn.CrossEntropyLoss()
# 这里使用 optim 包进行随机梯度下降(stochastic gradient descent)优化
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate, weight_decay=lambda_l2)
# 开始训练
for t in range(1000):
# 把数据输入模型,得到预测结果
y_pred = model(X)
# 计算损失和准确率
loss = criterion(y_pred, Y)
score, predicted = torch.max(y_pred, 1)
acc = (Y == predicted).sum().float() / len(Y)
print('[EPOCH]: %i, [LOSS]: %.6f, [ACCURACY]: %.3f' % (t, loss.item(), acc))
display.clear_output(wait=True)
# 反向传播前把梯度置 0
optimizer.zero_grad()
# 反向传播优化
loss.backward()
# 更新全部参数
optimizer.step()| 线性模型 | Linear(in_features=2, out_features=100, bias=True) Linear(in_features=100, out_features=3, bias=True) epoch:1000 optimizer:SGD learning_rate = 1e-3 |
[LOSS]: 0.862976 [ACCURACY]: 0.501 |
|
| 两层神经网络 | Linear(in_features=2, out_features=100, bias=True) Sigmoid() Linear(in_features=100, out_features=3, bias=True) epoch:1000 optimizer:Adam learning_rate = 1e-3 |
[LOSS]: 0.754807 [ACCURACY]: 0.509 |
|
| 两层神经网络 |
Linear(in_features=2, out_features=100, bias=True) ReLU() Linear(in_features=100, out_features=3, bias=True) epoch:1000 optimizer:Adam learning_rate = 1e-3 |
[LOSS]: 0.171876 [ACCURACY]: 0.955 |
|
| 两层神经网络 | Linear(in_features=2, out_features=100, bias=True) ReLU() Linear(in_features=100, out_features=3, bias=True) epoch:1000 optimizer:SGD learning_rate = 1e-1 |
[LOSS]: 0.377146 [ACCURACY]: 0.813 |
|
| 三层神经网络 | Linear(in_features=2, out_features=100, bias=True) ReLU() Linear(in_features=100, out_features=25, bias=True) ReLU() Linear(in_features=25, out_features=3, bias=True) epoch:1000 optimizer:Adam learning_rate = 1e-3 |
[LOSS]: 0.022764 [ACCURACY]: 0.998 |
|
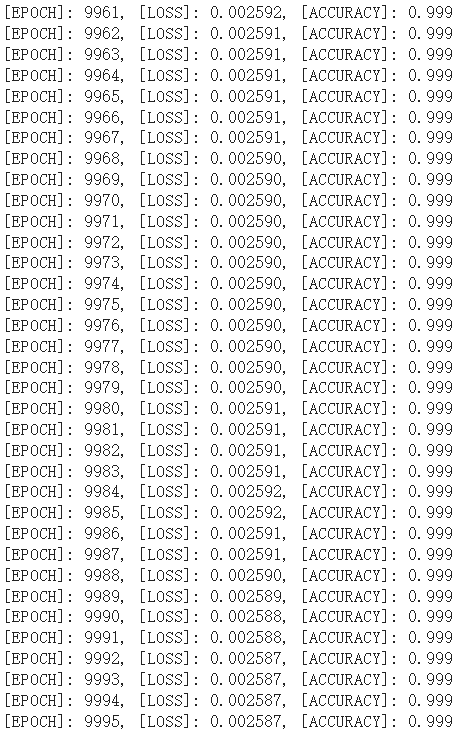
| 三层神经网络 | Linear(in_features=2, out_features=100, bias=True) ReLU() Linear(in_features=100, out_features=25, bias=True) ReLU() Linear(in_features=25, out_features=3, bias=True) epoch:10000 optimizer:Adam learning_rate = 1e-3 |
[LOSS]: 0.002587 [ACCURACY]: 0.999 |
|

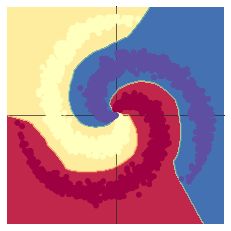

在10000轮训练过程中,损失函数出现先减小后增大再减小的现象。该现象可能是损失函数进入局部最小值后发生震荡,最终又跳出该局部最小值造成的。也可能是学习率过大造成震荡,在权重衰减达到合适的学习率后震荡消失。