c++ 扫描线填充算法实现,对 DEM 数据进行置平
ScanlineFilling.h
#include ScanlineFilling.cpp
#include "ScanlineFilling.h"
#include 二维矩阵填充测试:
int main() {
int** matrix = new int* [10];
for (int i = 0; i < 10; i++) {
matrix[i] = new int[10];
for (int j = 0; j < 10; j++) {
matrix[i][j] = 0;
}
}
int** position = new int* [4];
position[0] = new int[2];
position[1] = new int[2];
position[2] = new int[2];
position[3] = new int[2];
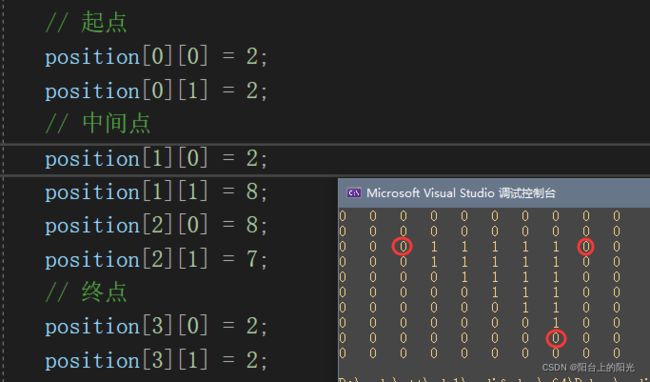
// 起点
position[0][0] = 2;
position[0][1] = 2;
// 中间点
position[1][0] = 2;
position[1][1] = 8;
position[2][0] = 8;
position[2][1] = 7;
// 终点
position[3][0] = 2;
position[3][1] = 2;
ScanlineFilling* sc = new ScanlineFilling();
sc->fill(matrix, 10, 10, position, 4, 1);
// 打印填充结果
for (int i = 0; i < 10; i++) {
for (int j = 0; j < 10; j++) {
cout << matrix[i][j] << " ";
}
cout << endl;
}
return 0;
}
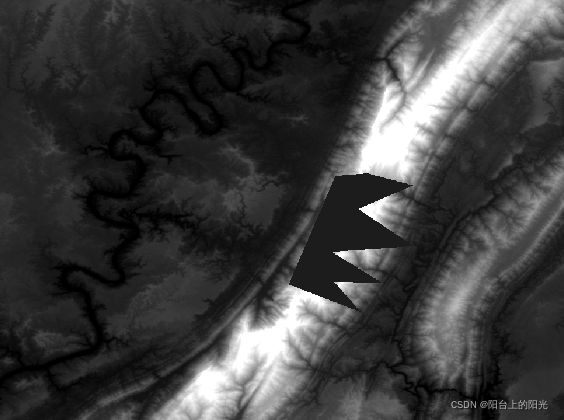
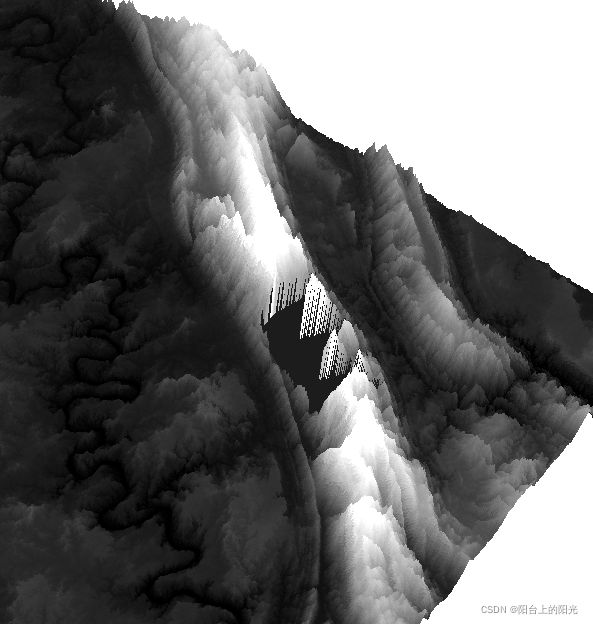
对 DEM 数据进行置平
ScanlineFilling* sc = new ScanlineFilling();
// greyValue: dem 高程值二维矩阵
// X,Y: dem 高程值二维矩阵在 x(lat),y(lon)方向上的像素个数
// position: 要填充的多边形的坐标(第一个点和最后一个点相同),
// 用 shp 文件置平,经纬度要转换为 dem 高程值的索引位置
// pointCount: 多边形坐标个数, position.length
// minGreyValue: 要填充的高程值
sc->fill(greyValue, X, Y, position, pointCount, minGreyValue);
填充结果: