【python+ROS+路径规划】六、mpc轨迹规划和跟踪
所使用的就是pyomo,使用mpc框架,达到的效果是优化轨迹并进行轨迹跟踪,如图:
pyomo相关教程:【python+ROS+路径规划】五、pyomo非线性规划工具.

python+mpc轨迹跟踪
- 使用mpc优化路径
-
- mpc框架的数学形式
- mpc轨迹规划代码
- 使用mpc跟踪
- 发布控制指令
使用mpc优化路径
首先要有一个初始路径:
使用Astar的可以见这篇文章:【python+ROS+路径规划】四、发布路径
或者也可以使用ros包中的路径。
mpc框架的数学形式
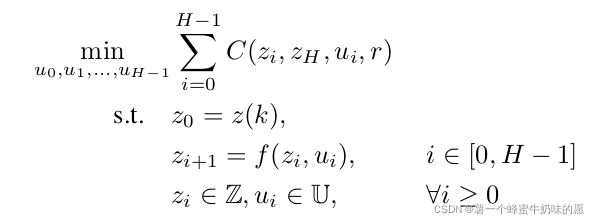
其中目标函数为:

这里为了简化模型,控制不是加速度而是速度,第一项是原始轨迹和优化轨迹的差,第二项是参考控制和优化控制的差,第三项是两个相邻的控制之间的差。
mpc轨迹规划代码
使用pyomo搭建的具体框架如下:
def MPC_opt(path,theta):
#滚动长度
H = len(path)-1
model = ConcreteModel()
#Set
model.zk_number = RangeSet(1,H)
model.uk_number = RangeSet(0,H)
model.uk_obj = RangeSet(0,H-1)
# Parameters
#需要调节的参数如下
model.Q = Param(RangeSet(1,2),initialize={1:1,2:1},mutable=True)
model.R = Param(RangeSet(1,2),initialize={1:1,2:1},mutable=True)
model.S = Param(RangeSet(1,2),initialize={1:1,2:1},mutable=True)
#这个要根据机器人来定
model.vmax = Param(initialize=0.5)
#这个也要自己计算,这里是每两个点之间的距离除以最大速度
model.dt = Param(initialize=0.04998/model.vmax)
model.z0 = Param(RangeSet(0,state_number-1),initialize={0:path[0][0],1:path[0][1],2:theta[0]})
# Variables
model.z = Var(RangeSet(0,state_number-1),model.uk_number) #建立[x,y,θ]变量
model.v = Var(model.uk_number,bounds=(0,model.vmax))
model.w = Var(model.uk_number,bounds=(-1,1))
#0:x 1:y 2:θ
#0:v 1:w
# Constraint
model.z0_update = Constraint(RangeSet(0,state_number-1),rule=lambda model,i:model.z[i,0]==model.z0[i])
model.x_update = Constraint(model.uk_number,rule=lambda model,k:model.z[0,k+1]==model.z[0,k]+model.v[k]*cos(model.z[2,k])*model.dt
if k<=H-1 else Constraint.Skip)
model.y_update = Constraint(model.uk_number,rule=lambda model,k:model.z[1,k+1]==model.z[1,k]+model.v[k]*sin(model.z[2,k])*model.dt
if k<=H-1 else Constraint.Skip)
model.θ_update = Constraint(model.uk_number,rule=lambda model,k:model.z[2,k+1]==model.z[2,k]+model.w[k]*model.dt
if k<=H-1 else Constraint.Skip)
# Objective
model.xQx = model.Q[1]*sum((model.z[0,i]-path[i-1][0])**2 for i in model.zk_number)
model.yQy = model.Q[2]*sum((model.z[1,i]-path[i-1][1])**2 for i in model.zk_number)
model.vRv = model.R[1]*sum((model.vmax-model.v[i])**2 for i in model.uk_obj)
model.wRw = model.R[2]*sum(model.w[i]**2 for i in model.uk_obj)
model.dvSdv = model.S[1]*sum((model.v[i+1]-model.v[i])**2 for i in model.uk_obj)
model.dwSdw = model.S[2]*sum((model.w[i+1]-model.w[i])**2 for i in model.uk_obj)
model.obj = Objective(expr=model.xQx+model.yQy+model.vRv+model.wRw+model.dvSdv+model.dwSdw,sense=minimize)
#Solve
SolverFactory("ipopt").solve(model)
x_opt = [model.z[0,k]() for k in model.zk_number]
y_opt = [model.z[1,k]() for k in model.zk_number]
θ_opt = [model.z[2,k]() for k in model.zk_number]
return x_opt,y_opt,θ_opt
这里注意,轨迹的优化方面初始是没有角度的,之所以最后给出了角度,是因为有运动学方程,这也是mpc的优点。
使用mpc跟踪
框架搭建同理:
def MPC_tracking(path,theta,vref,info):
H = len(path)-1
if H <= 2:
return 0,0
else:
model = ConcreteModel()
#Set
model.zk_number = RangeSet(1,H)
model.uk_number = RangeSet(0,H)
model.uk_obj = RangeSet(0,H-1)
# Parameters
model.Q = Param(RangeSet(1,3),initialize={1:1,2:1,3:0.01},mutable=True)
model.R = Param(RangeSet(1,2),initialize={1:0.5,2:0.02},mutable=True)
model.S = Param(RangeSet(1,2),initialize={1:0.1,2:0.05},mutable=True)
model.vref = vref
model.dt = 0.04998/model.vref
model.z0 = Param(RangeSet(0,state_number-1),initialize={0:info[0],1:info[1],2:info[2]})
# Variables
model.z = Var(RangeSet(0,state_number-1),model.uk_number) #建立[x,y,θ]变量
model.v = Var(model.uk_number,bounds=(0,vmax))
model.w = Var(model.uk_number,bounds=(-1,1))
#0:x 1:y 2:θ
#0:v 1:w
# Constraint
model.z0_update = Constraint(RangeSet(0,state_number-1),rule=lambda model,i:model.z[i,0]==model.z0[i])
model.x_update = Constraint(model.uk_number,rule=lambda model,k:model.z[0,k+1]==model.z[0,k]+model.v[k]*cos(model.z[2,k])*model.dt[k]
if k<=H-1 else Constraint.Skip)
model.y_update = Constraint(model.uk_number,rule=lambda model,k:model.z[1,k+1]==model.z[1,k]+model.v[k]*sin(model.z[2,k])*model.dt[k]
if k<=H-1 else Constraint.Skip)
model.θ_update = Constraint(model.uk_number,rule=lambda model,k:model.z[2,k+1]==model.z[2,k]+model.w[k]*model.dt[k]
if k<=H-1 else Constraint.Skip)
# Objective
model.xQx = model.Q[1]*sum((model.z[0,i]-path[i-1][0])**2 for i in model.zk_number)
model.yQy = model.Q[2]*sum((model.z[1,i]-path[i-1][1])**2 for i in model.zk_number)
model.θQθ = model.Q[3]*sum((model.z[2,i]-theta[i])**2 for i in model.zk_number)
model.vRv = model.R[1]*sum((model.vref[i]-model.v[i])**2 for i in model.uk_obj)
model.wRw = model.R[2]*sum(model.w[i]**2 for i in model.uk_obj)
model.dvSdv = model.S[1]*sum((model.v[i+1]-model.v[i])**2 for i in model.uk_obj)
model.dwSdw = model.S[2]*sum((model.w[i+1]-model.w[i])**2 for i in model.uk_obj)
model.obj = Objective(expr=model.xQx+model.yQy+model.θQθ+model.vRv+model.wRw+model.dvSdv+model.dwSdw,sense=minimize)
#Solve
SolverFactory("ipopt").solve(model)
v_opt = model.v[0]()
w_opt = model.w[0]()
return v_opt,w_opt
发布控制指令
之后发布速度和角速度:
def mpcTracking(self):
#前置信息
#首先计算时间
dt = 0.04998/self.Vref#最后一个没有用,第一个对应从第一个点到第二个点应该用的时间
theta = self.iniTheta
pose = self.iniPose
vref = self.Vref
#最后一个速度应该为0,先设置在约束上面
MPCCC = rospy.Publisher("/cmd_vel",Twist,queue_size=15)
msg = Twist()
# rate = rospy.Rate(400)
k = 0
T = 10 #滚动时域
#----------------------------------------------------------------------------------
while k < len(dt):
du = rospy.Duration(dt[k])
#需要根据时间获取当前信息
now_x,now_y,now_theta = self.getNowPose()
#这里得到的角度和使用的角度可能不一样
info = [now_x,now_y,opt_theta]
#---------------------------------------------------------------------------------------
#这里使用相关mpc算法,拿到速度角速度指令
#v_opt,w_opt
#---------------------------------------------------------------------------------------
msg.linear.x = v_opt
msg.angular.z = w_opt
MPCCC.publish(msg)
# rate.sleep()
rospy.sleep(du)
k +=1