opencv canny源码解析_50 行代码,看 Python + OpenCV 玩转实时图像处理!
- opencv
- canny源码解析
- python
- cv2
- 打开
- raw
- python
- opencv
- findcontours
- python
- opencv
- 图像切割
- python
- opencv把图像变清晰
- qt
- opencv
- 图像采集和图像处理线程


本文来自博客专栏《Python》
本专栏专注于Python项目实战开发应用
初学OpenCV图像处理的小伙伴肯定对什么高斯函数、滤波处理、阈值二值化等特性非常头疼,这里给各位分享一个小项目,可通过摄像头实时动态查看各类图像处理的特点,也可对各位调参、测试有一定帮助,项目演示效果如下:

1、导入库文件
这里主要使用PySimpleGUI、cv2和numpy库文件,PySimpleGUI库文件实现GUI可视化,cv2库文件是Python的OpenCV接口文件,numpy库文件实现数值的转换和运算,均可通过pip导入。import PySimpleGUI as sg #pip install pysimpleguiimport cv2 #pip install opencv-pythonimport numpy as np #pip install numpy2、设计GUI
基于PySimpleGUI库文件实现GUI设计,本项目界面设计较为简单,设计800X400尺寸大小的框图,浅绿色背景,主要由摄像头界面区域和控制按钮区域两部分组成。效果如下所示: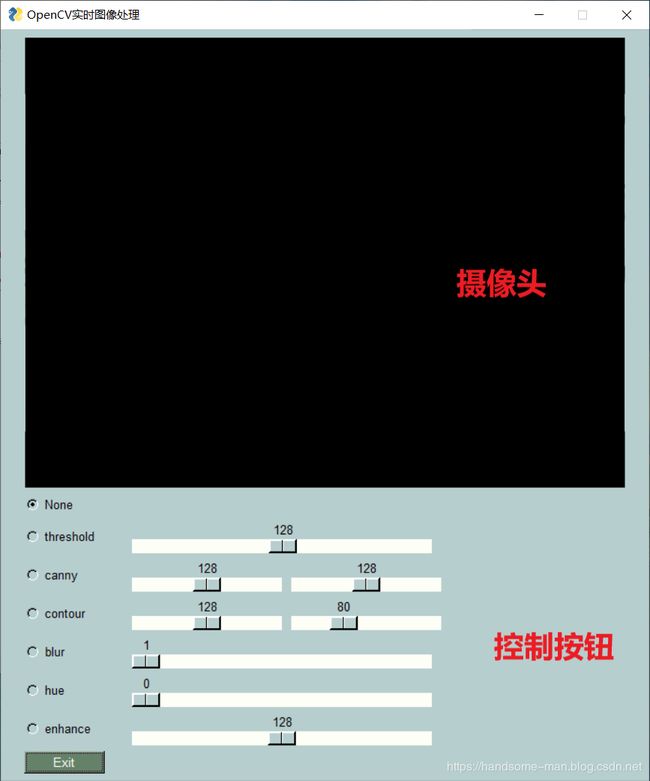 GUI代码如下所示:
GUI代码如下所示:
#背景色 sg.theme('LightGreen') #定义窗口布局 layout = [ [sg.Image(filename='', key='image')], [sg.Radio('None', 'Radio', True, size=(10, 1))], [sg.Radio('threshold', 'Radio', size=(10, 1), key='thresh'), sg.Slider((0, 255), 128, 1, orientation='h', size=(40, 15), key='thresh_slider')], [sg.Radio('canny', 'Radio', size=(10, 1), key='canny'), sg.Slider((0, 255), 128, 1, orientation='h', size=(20, 15), key='canny_slider_a'), sg.Slider((0, 255), 128, 1, orientation='h', size=(20, 15), key='canny_slider_b')], [sg.Radio('contour', 'Radio', size=(10, 1), key='contour'), sg.Slider((0, 255), 128, 1, orientation='h', size=(20, 15), key='contour_slider'), sg.Slider((0, 255), 80, 1, orientation='h', size=(20, 15), key='base_slider')], [sg.Radio('blur', 'Radio', size=(10, 1), key='blur'), sg.Slider((1, 11), 1, 1, orientation='h', size=(40, 15), key='blur_slider')], [sg.Radio('hue', 'Radio', size=(10, 1), key='hue'), sg.Slider((0, 225), 0, 1, orientation='h', size=(40, 15), key='hue_slider')], [sg.Radio('enhance', 'Radio', size=(10, 1), key='enhance'), sg.Slider((1, 255), 128, 1, orientation='h', size=(40, 15), key='enhance_slider')], [sg.Button('Exit', size=(10, 1))] ] #窗口设计 window = sg.Window('OpenCV实时图像处理', layout, location=(800, 400), finalize=True)3、调用摄像头
打开电脑内置摄像头,将数据显示在GUI界面上,效果如下所示: 代码如下所示:
代码如下所示:
4、实时图像处理
4.1、阈值二值化
进行阈值二值化操作,大于阈值values['thresh_slider']的,使用255表示,小于阈值values['thresh_slider']的,使用0表示,效果如下所示: 代码如下所示:
代码如下所示:
if values['thresh']: frame = cv2.cvtColor(frame, cv2.COLOR_BGR2LAB)[:, :, 0] frame = cv2.threshold(frame, values['thresh_slider'], 255, cv2.THRESH_BINARY)[1]4.2、边缘检测
进行边缘检测,values['canny_slider_a']表示最小阈值,values['canny_slider_b']表示最大阈值,效果如下所示: 代码如下所示:if values['canny']: frame = cv2.Canny(frame, values['canny_slider_a'], values['canny_slider_b'])4.3、轮廓检测
轮廓检测是形状分析和物体检测和识别的有用工具,连接所有连续点(沿着边界)的曲线,具有相同的颜色或强度,效果如下所示: 代码如下所示:if values['contour']: hue = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) hue = cv2.GaussianBlur(hue, (21, 21), 1) hue = cv2.inRange(hue, np.array([values['contour_slider'], values['base_slider'], 40]), np.array([values['contour_slider'] + 30, 255, 220])) cnts= cv2.findContours(hue, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[0] cv2.drawContours(frame, cnts, -1, (0, 0, 255), 2)4.4、高斯滤波
进行高斯滤波,(21, 21)表示高斯矩阵的长与宽都是21,标准差取values['blur_slider'],效果如下所示: 代码如下所示:if values['blur']: frame = cv2.GaussianBlur(frame, (21, 21), values['blur_slider'])4.5、色彩转换
色彩空间的转化,HSV转换为BGR,效果如下所示: 代码如下所示:if values['hue']: frame = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) frame[:, :, 0] += int(values['hue_slider']) frame = cv2.cvtColor(frame, cv2.COLOR_HSV2BGR)4.6、调节对比度
增强对比度,使图像中的细节看起来更加清晰,效果如下所示: 代码如下所示:if values['enhance']: enh_val = values['enhance_slider'] / 40 clahe = cv2.createCLAHE(clipLimit=enh_val, tileGridSize=(8, 8)) lab = cv2.cvtColor(frame, cv2.COLOR_BGR2LAB) lab[:, :, 0] = clahe.apply(lab[:, :, 0]) frame = cv2.cvtColor(lab, cv2.COLOR_LAB2BGR)5、退出系统
直接break即可跳出循环。if event == 'Exit' or event is None: break 扫码订阅专栏
扫码订阅专栏
专栏介绍以及亮点
本专栏主要介绍Python项目实战开发应用,实际教程聚焦于功能,覆盖了基本的创建应用、构建和封装库。实例丰富,大量的技巧提示与图文解析,和详细的代码注解,帮助学习者快速领悟Python编程思想和掌握Python编程的核心知识,全面提升学习者学习Python语言在不同领域的实战应用技能。如果你想 学习Python项目实战开发应用 订阅这个专栏准没错 别犹豫 快扫码订阅专栏 38篇原创博文 等你来看↓↓↓
 戳这里,解锁38篇原创博文
戳这里,解锁38篇原创博文